智高 #1269編程積木應用套件micro:bit專用
延伸應用簡單模型3
平衡遊戲
本次模型主要應用micro:bit內建的加速度感測計
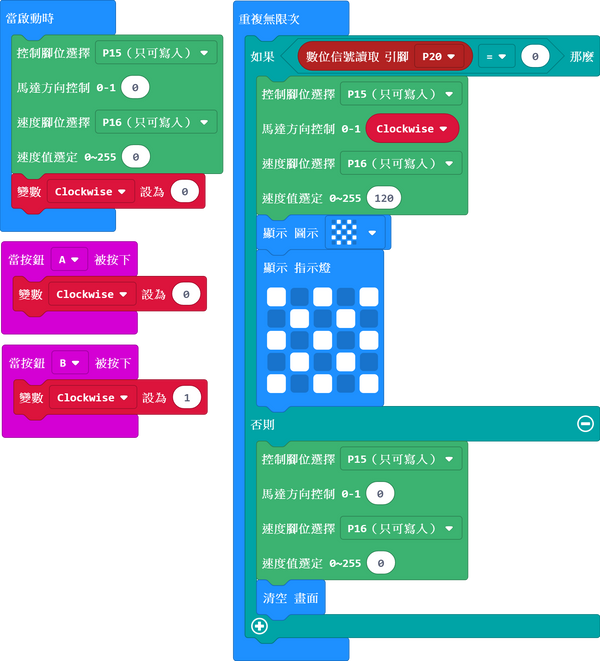
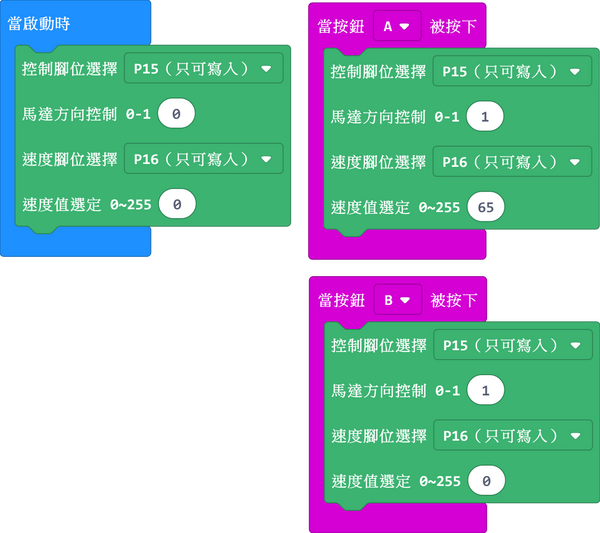
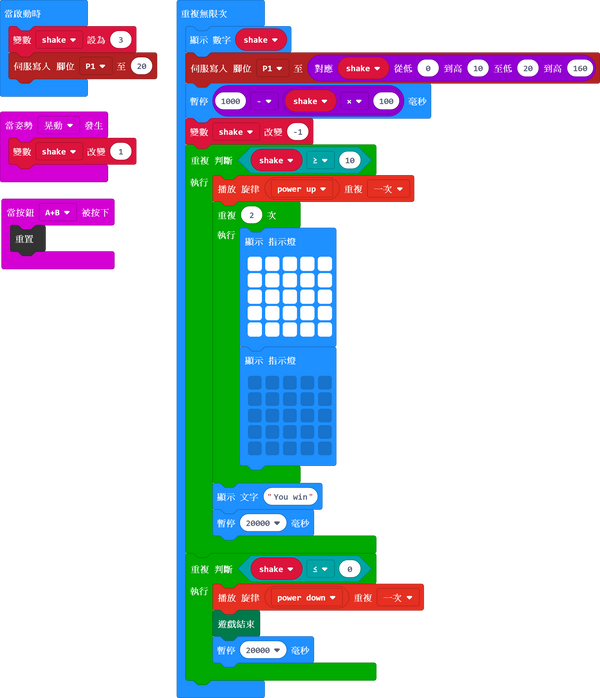
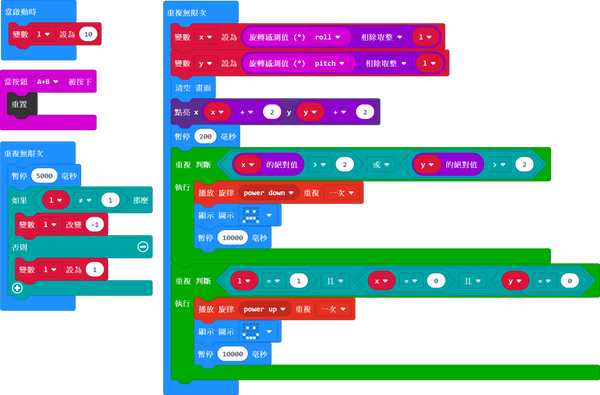
程式碼
開始時預設變數L為10。
當A、B同時按下則重新開始
每經過五秒,變數L減少1(標準會越來越嚴格)
變數x:為左右旋轉時改變的角度(數值)除以L(往右為正、往左為負)
變數y:為前後旋轉時改變的角度(數值)除以L(往前為負、往後為正)
維持水平時(x,y)的座標為(0,0)
點亮座標(x+2,y+2),加2是因為LED燈的座標中心點為(2,2)
當(x,y)超出LED燈範圍顯示哭臉
當時間到(約50秒)而LED燈維持在正中央則顯示笑臉,代表挑戰成功。
失敗的哭臉
成功的笑臉