生活中的科學EP24-搖步機

大家好我是浣熊老師,各位有玩過寶可夢GO或是皮克敏嗎?這兩款手機遊戲都有一項有趣的特色,就是將走路與遊戲機制結合,寶可夢GO需要依靠走路來孵蛋,而皮克敏則需要累積走路步數讓花苗成長,但對於上班族或是學生來說,一天能夠走路的時間僅有幾小時,於是搖步機便應運而生,它能夠透過擺動的方式模擬雙腿行走時的擺動,讓手機內建的加速度感測器誤以為你在進行走動。
今天浣熊老師要帶大家使用積木和Micro:bit來創造一個搖步機,讓你就算在定點也能輕鬆累積步數哦!
現在就讓浣熊老師一步步教大家如何製作吧!
◆ 組裝步驟
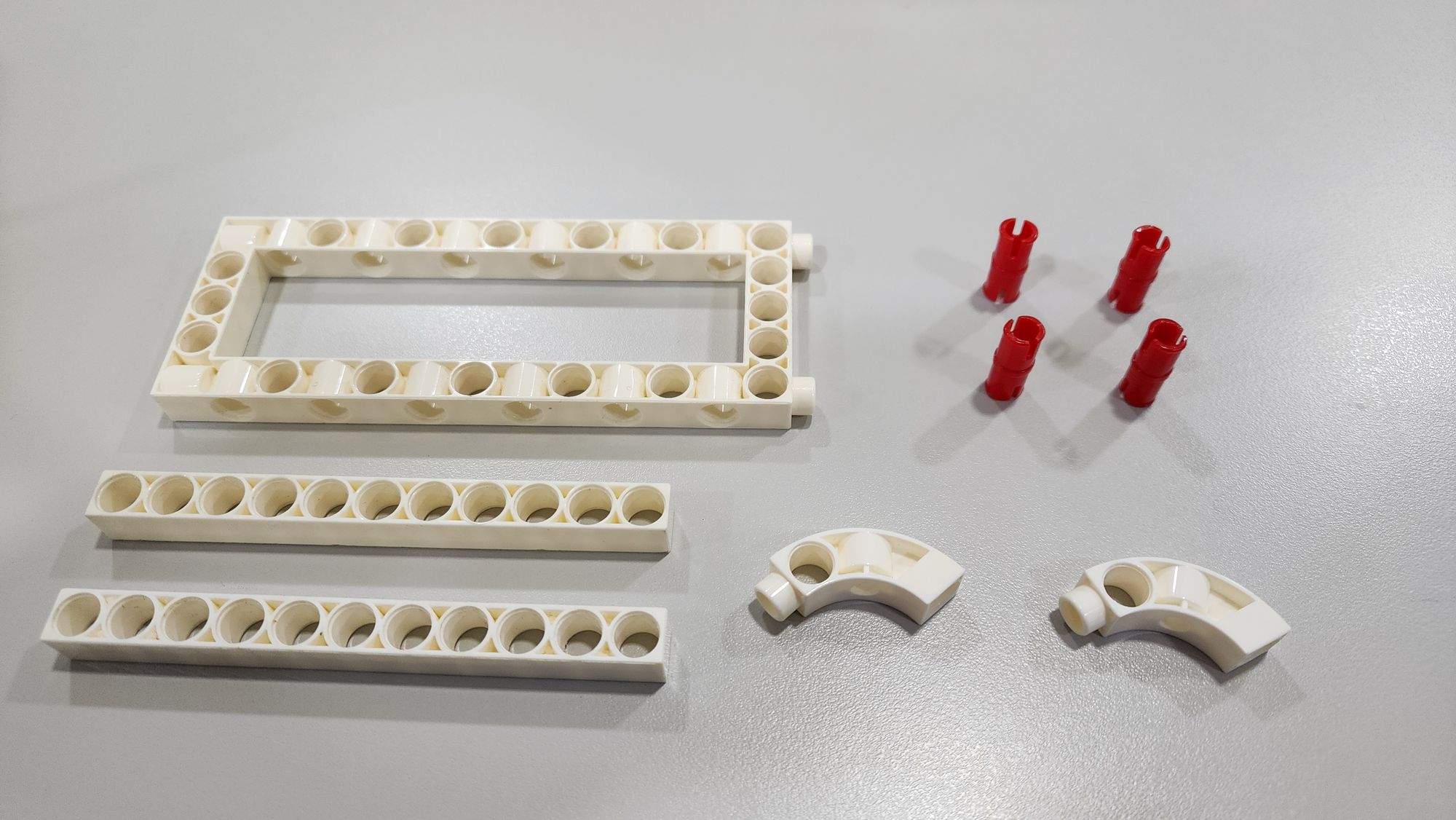
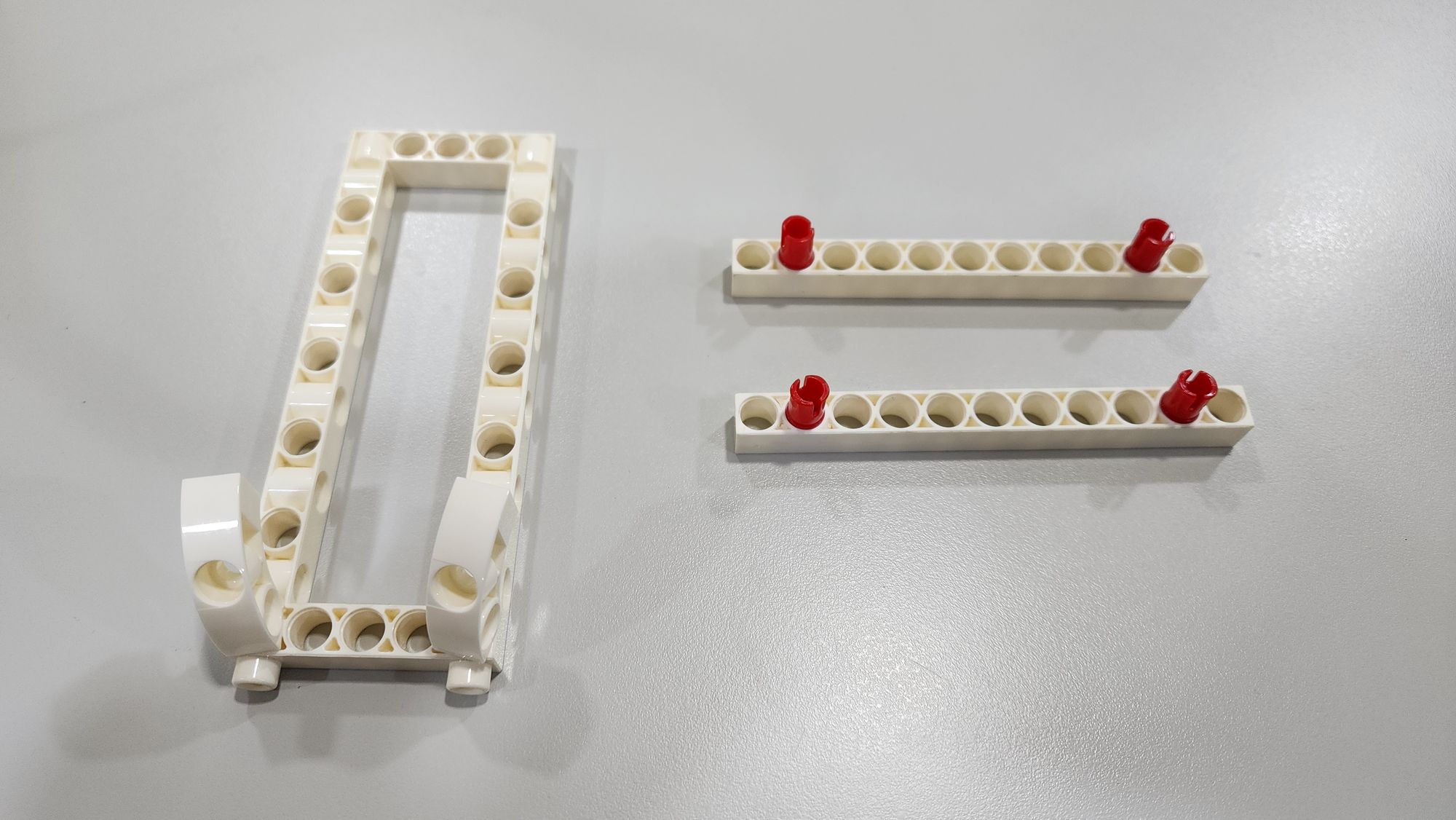
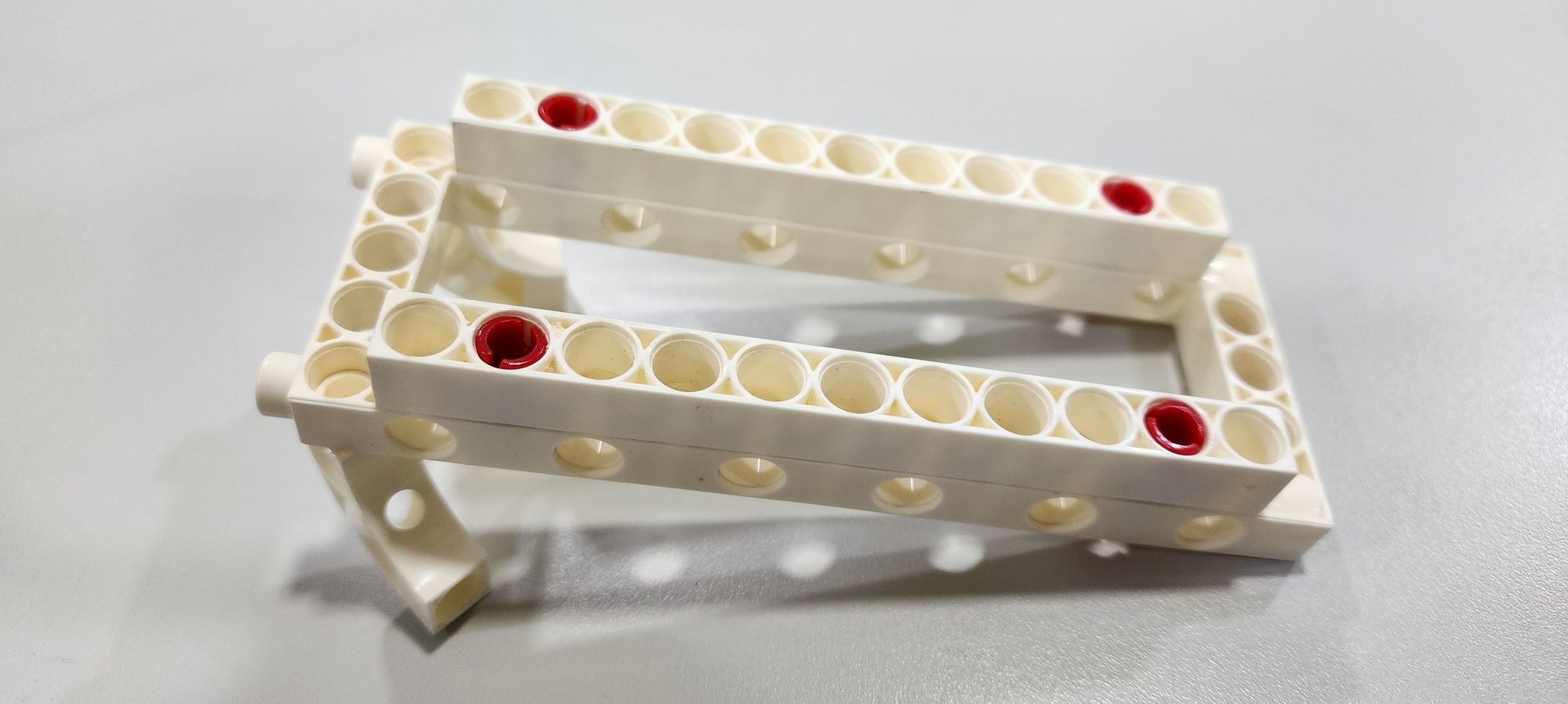
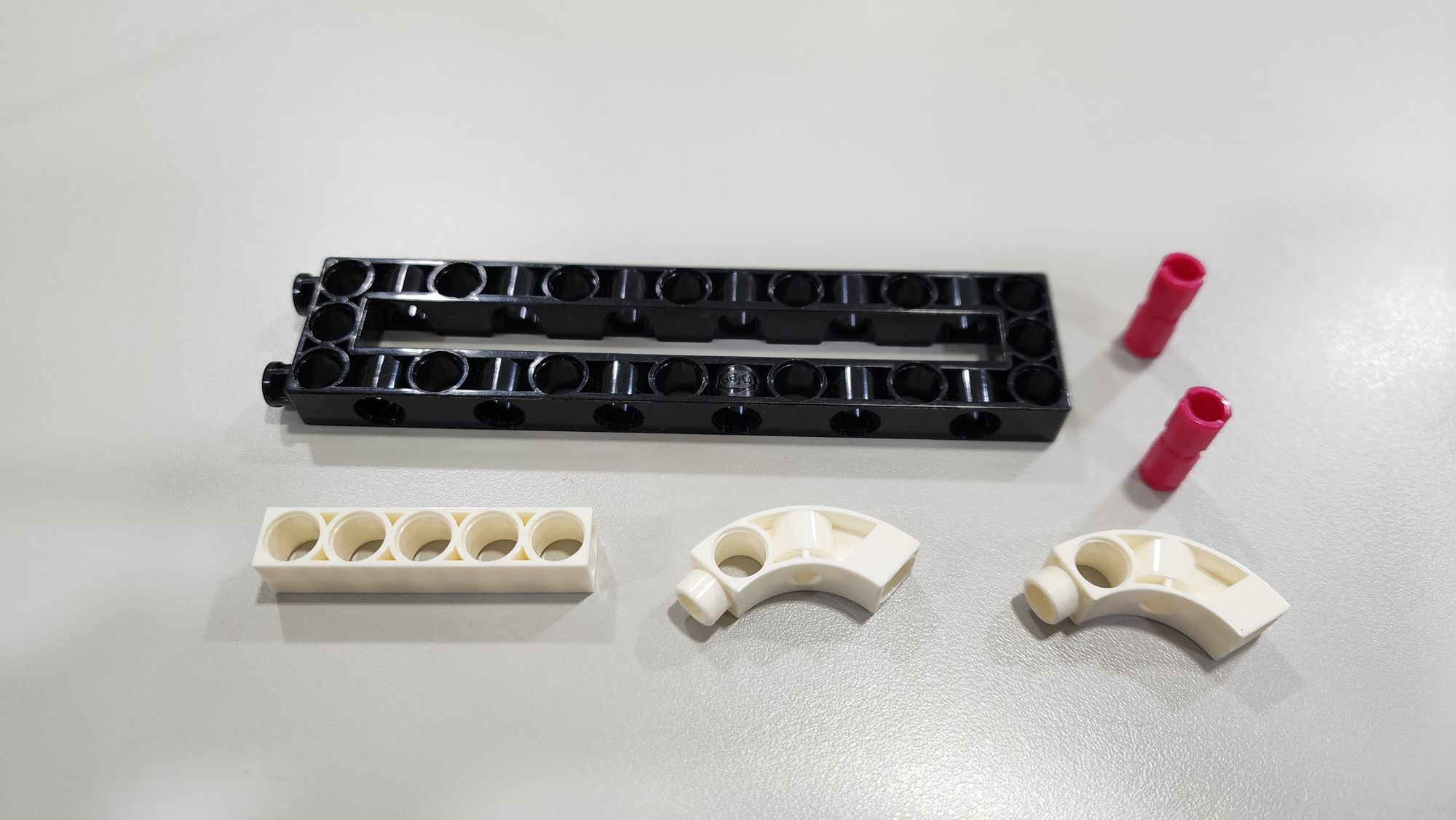
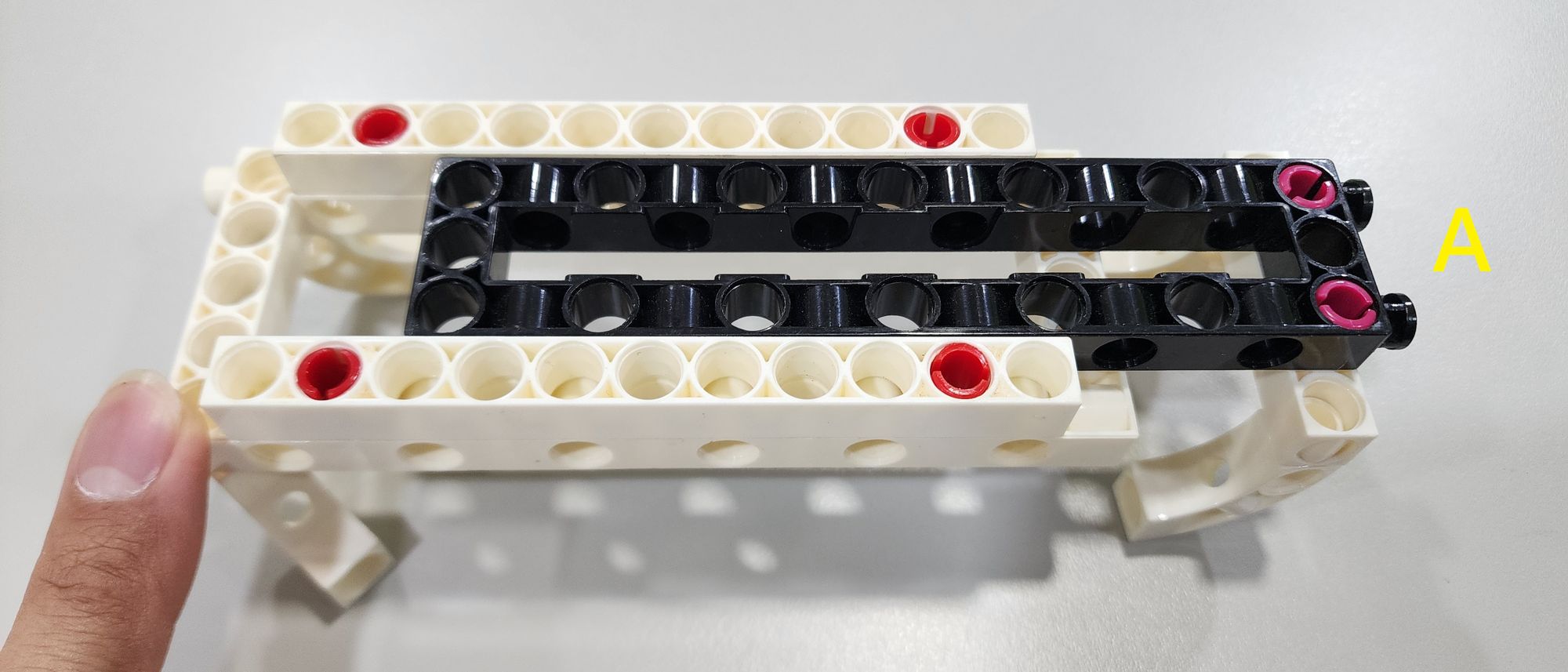
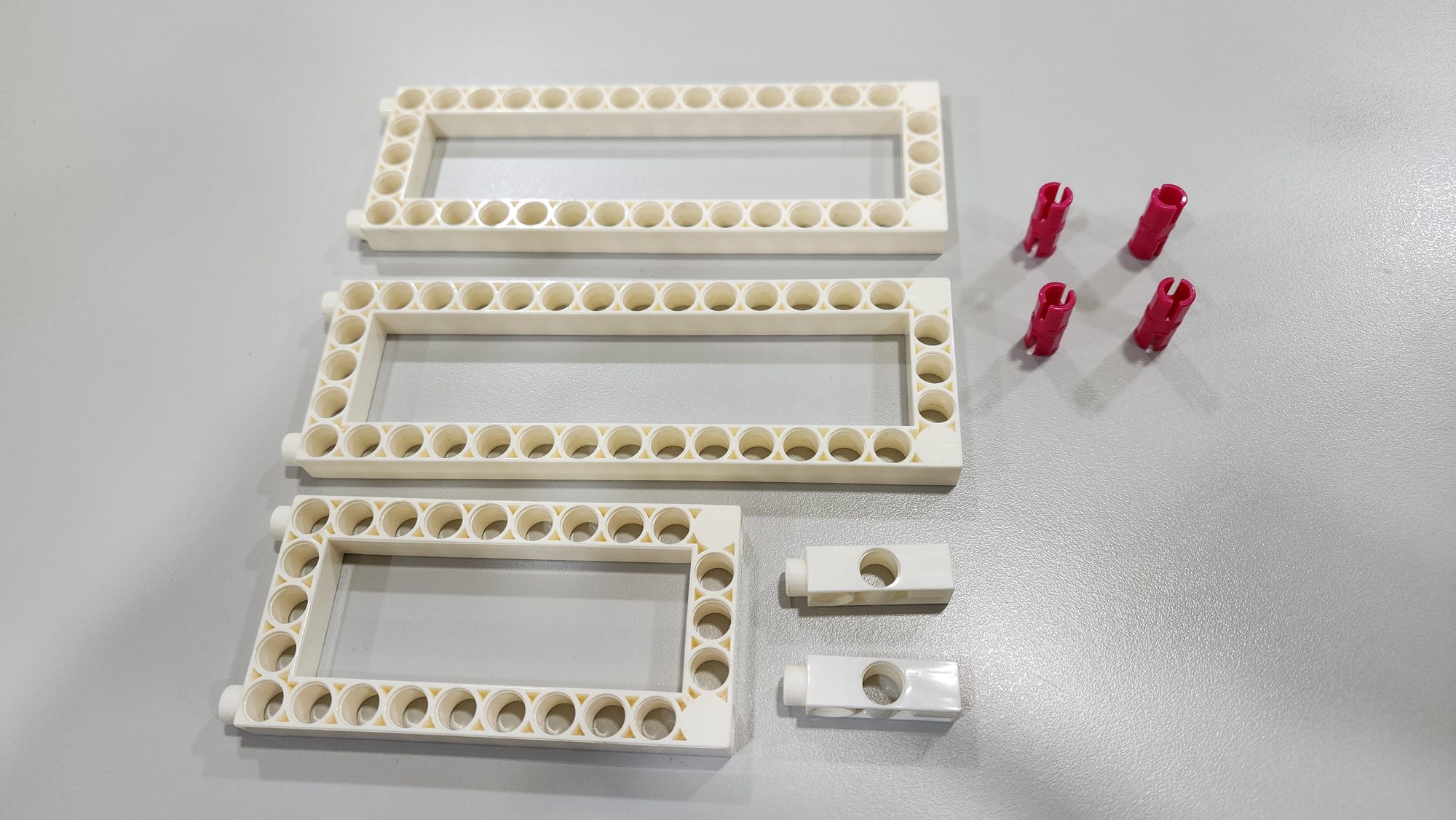
搖步機簡單來說就是一個會左右擺動的手機架,因此第一步我們要製作出手機架背面的滑軌,需要使用到11孔長條、5×13孔超長方框、3孔1/4弧長條以及20mm 軸扣鍵(圖一),並依照圖示將他們安裝在一起(圖二、三)。
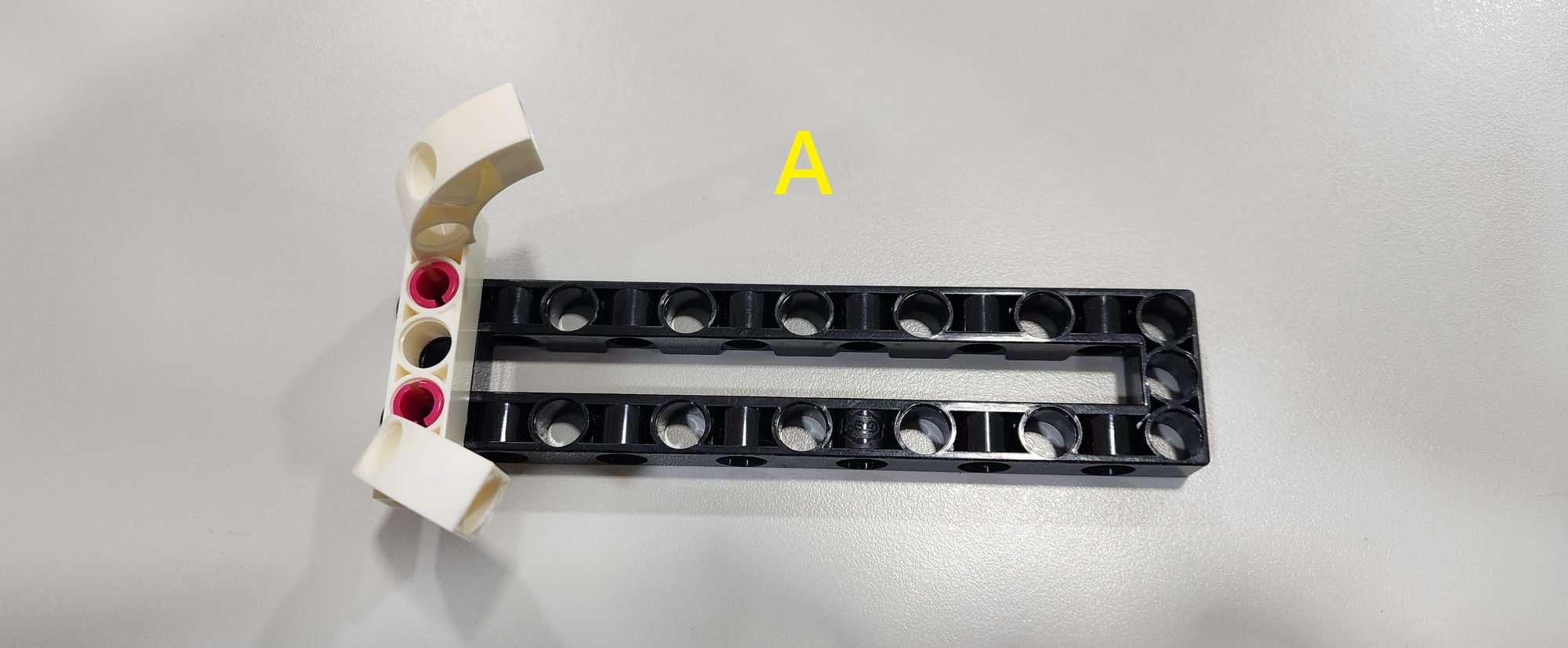
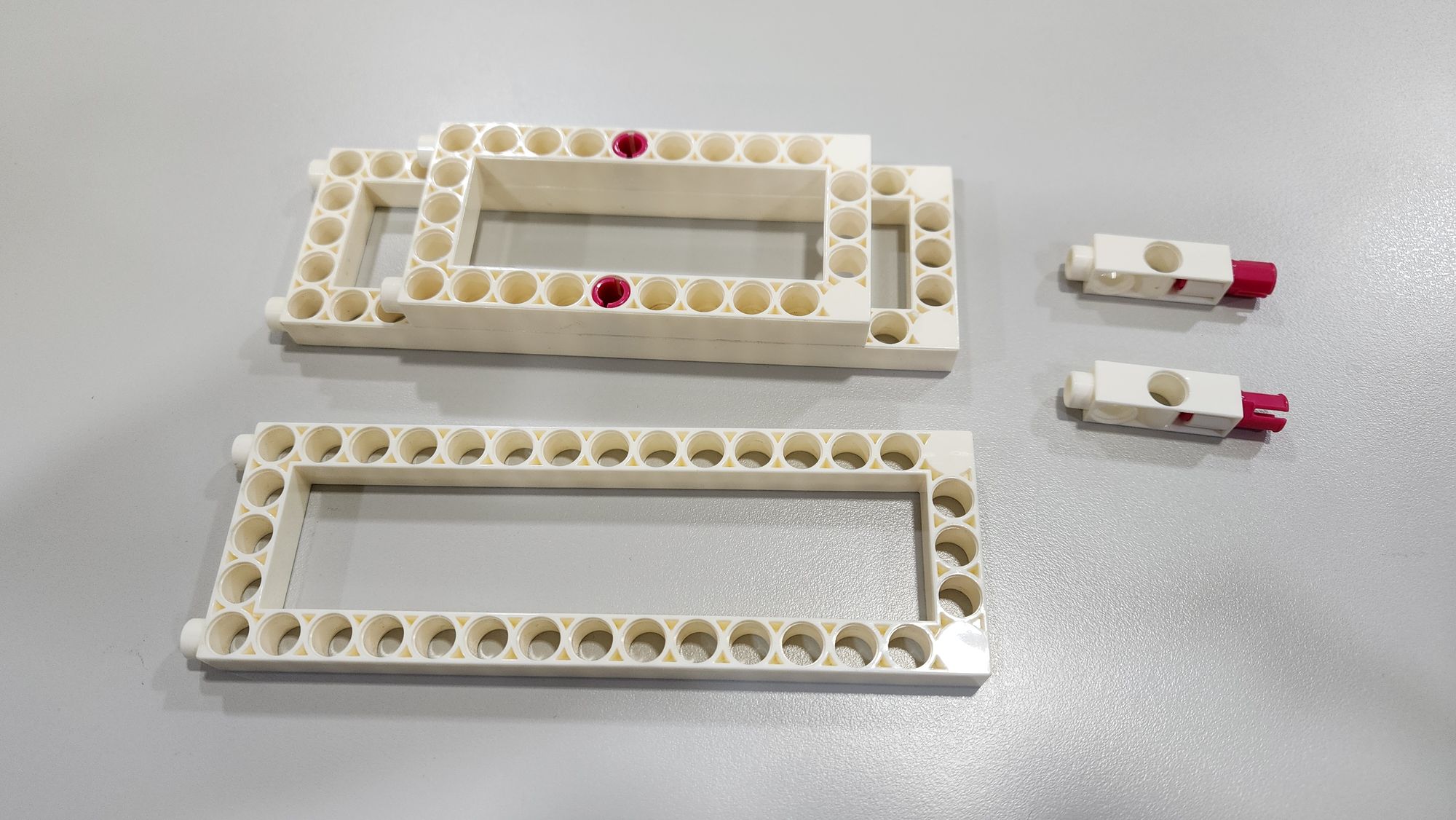
第二步我們要來做出伸縮桿,需要使用到3x13孔超長方框、5孔長條、3孔1/4弧長條以及栓扣鍵(圖四),依照圖示將零件組裝成部件A(圖五)。
接著將部件A插入滑軌當中(圖六),伸縮桿要能夠在滑軌之間滑動。
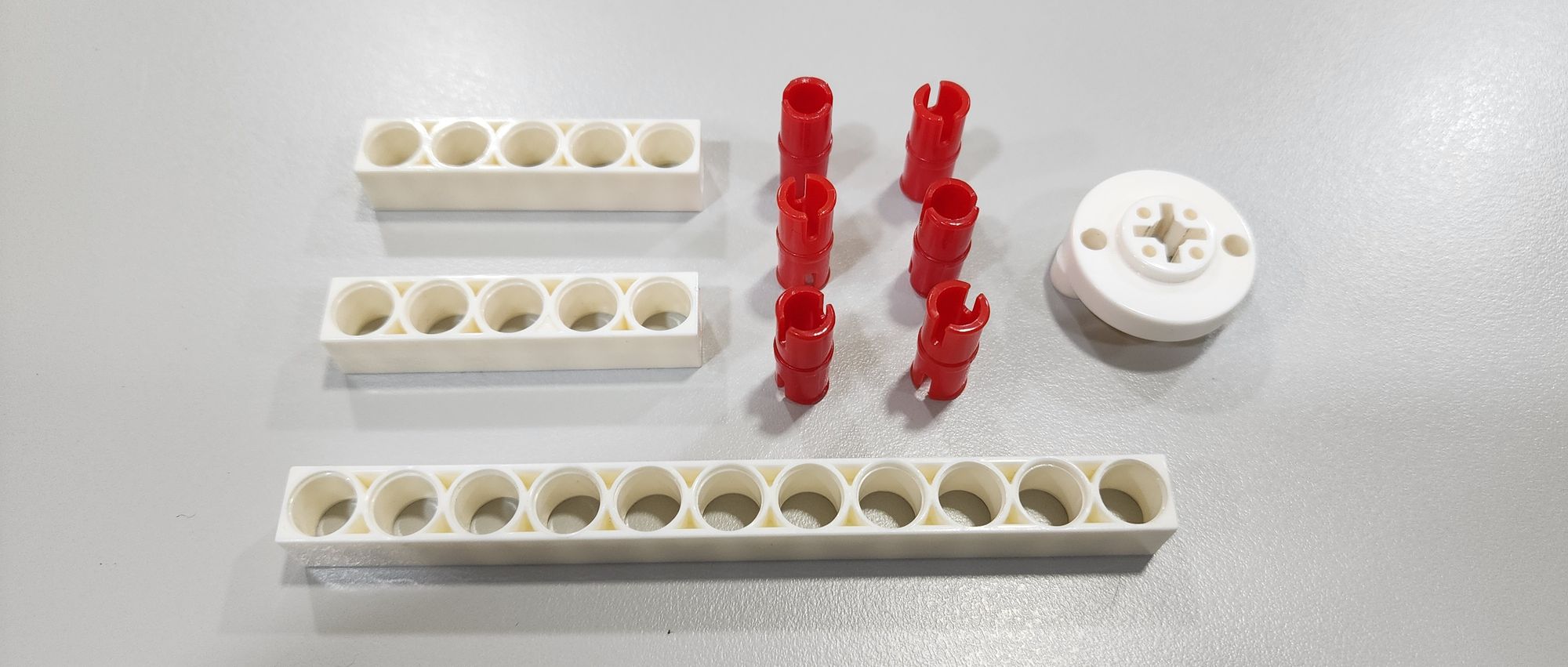
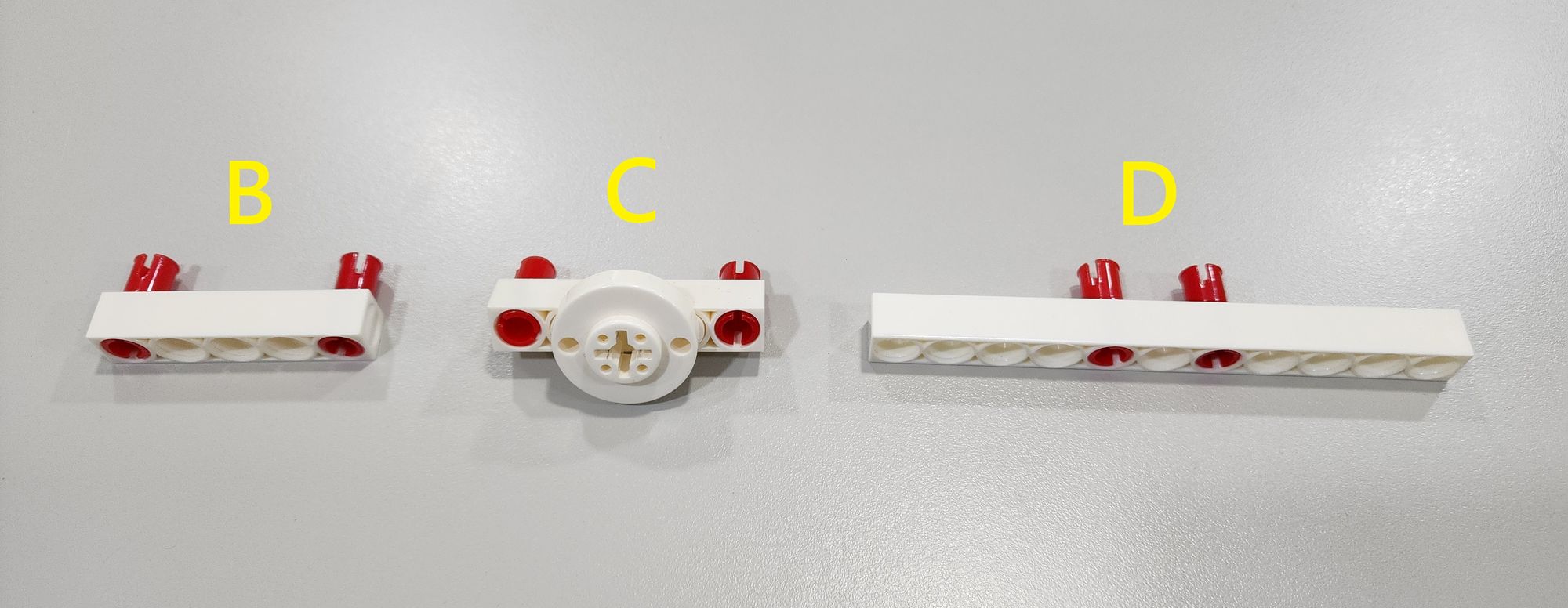
第三步我們要製作穩定伸縮桿的部件,需要使用到5孔長條、11孔長條、20mm 軸扣鍵以及軸轉接器(圖七),依照圖示將零件組裝成部件B、C以及部件D(圖八)。
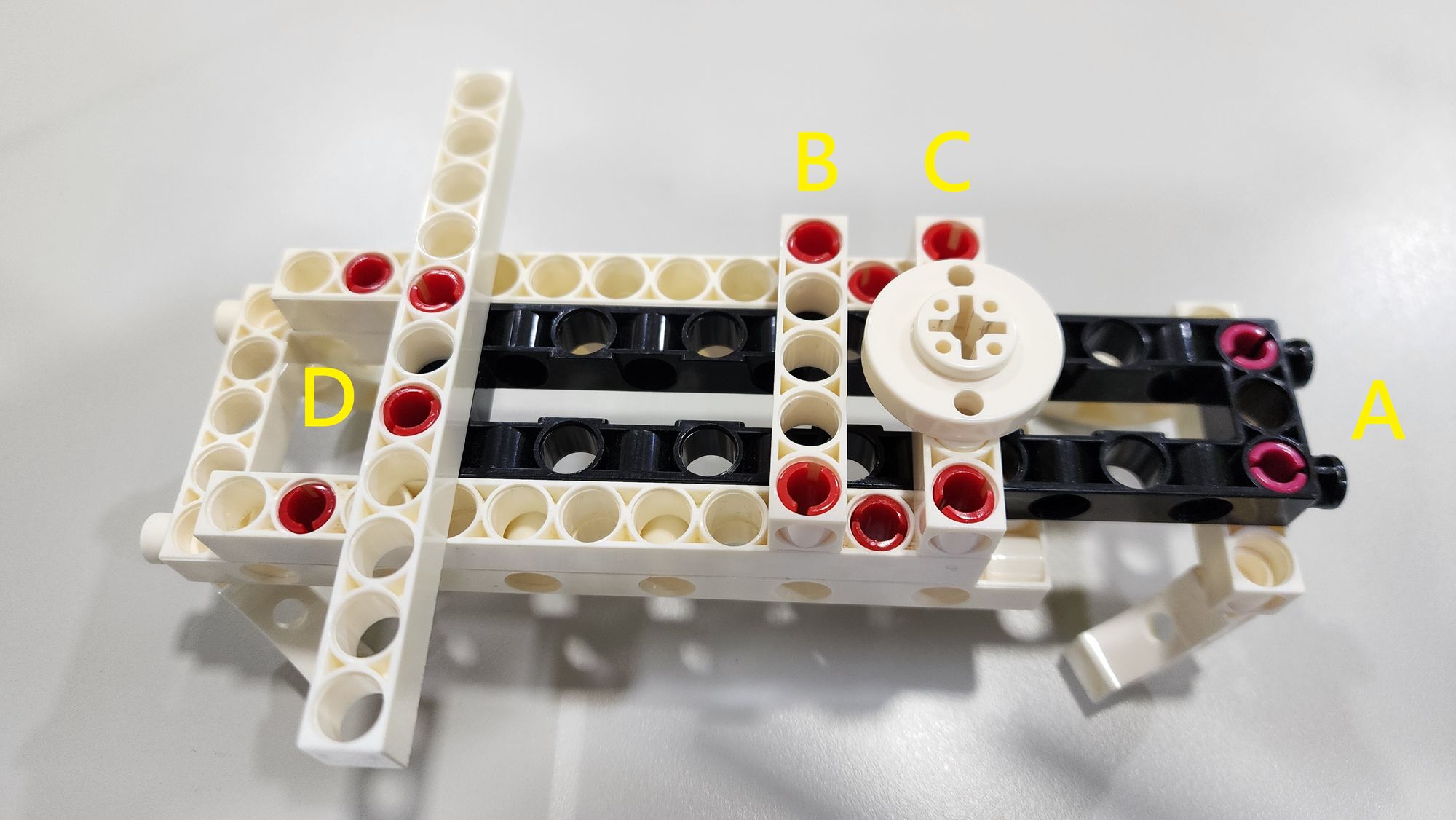
接著分別將部件B、C以及部件D安裝在滑軌與伸縮桿上(圖九),這三個部件就像是護欄一樣,能夠防止伸縮桿在滑動時脫離滑軌。
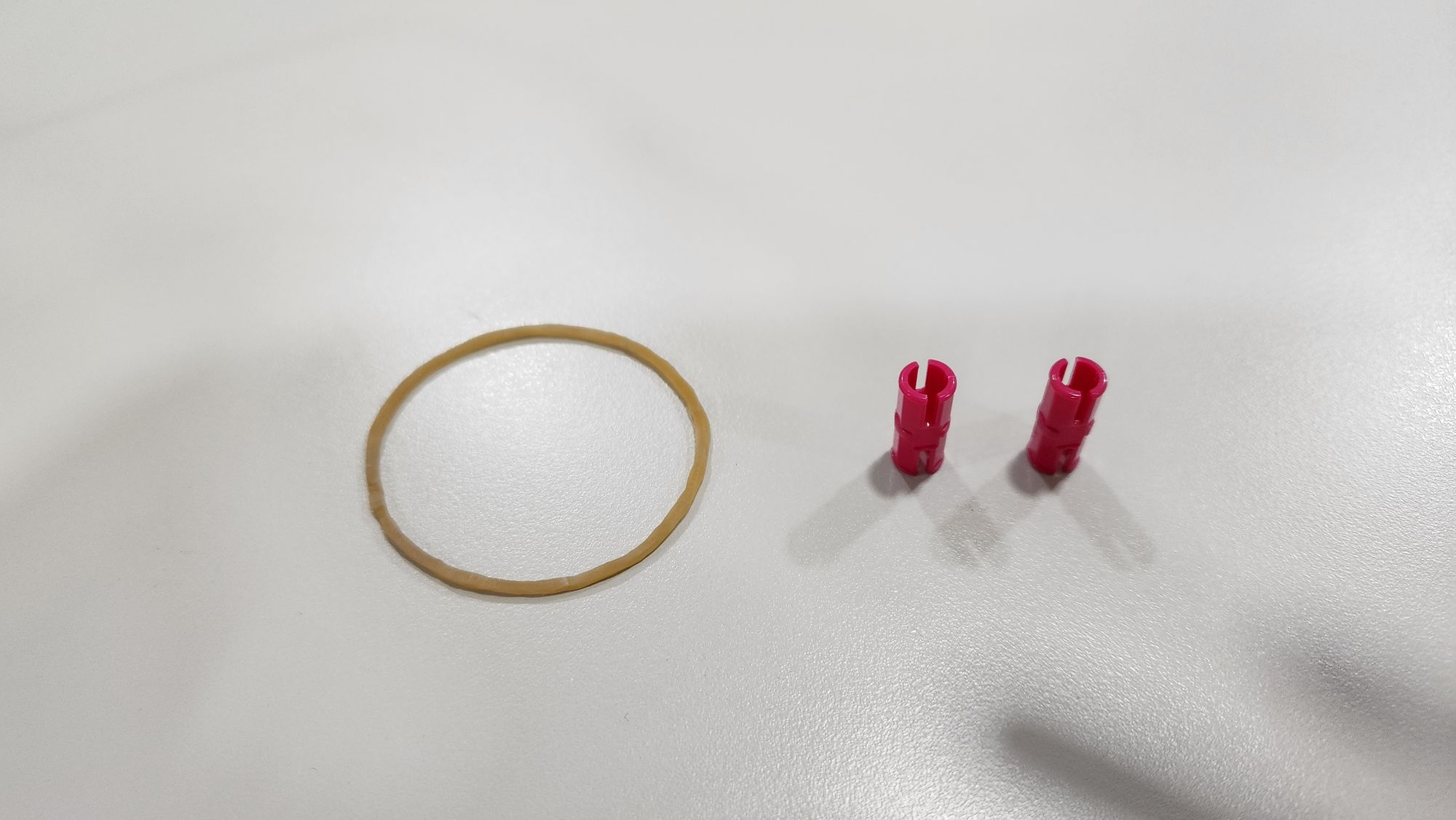
第四步我們要將橡皮筋安裝在手機架上,需要使用到橡皮筋以及20mm 軸扣鍵(圖十),首先將橡皮筋套入20mm 軸扣鍵的溝槽,接著依照圖示將20mm 軸扣鍵安裝在5×13孔超長方框上(圖十一)。
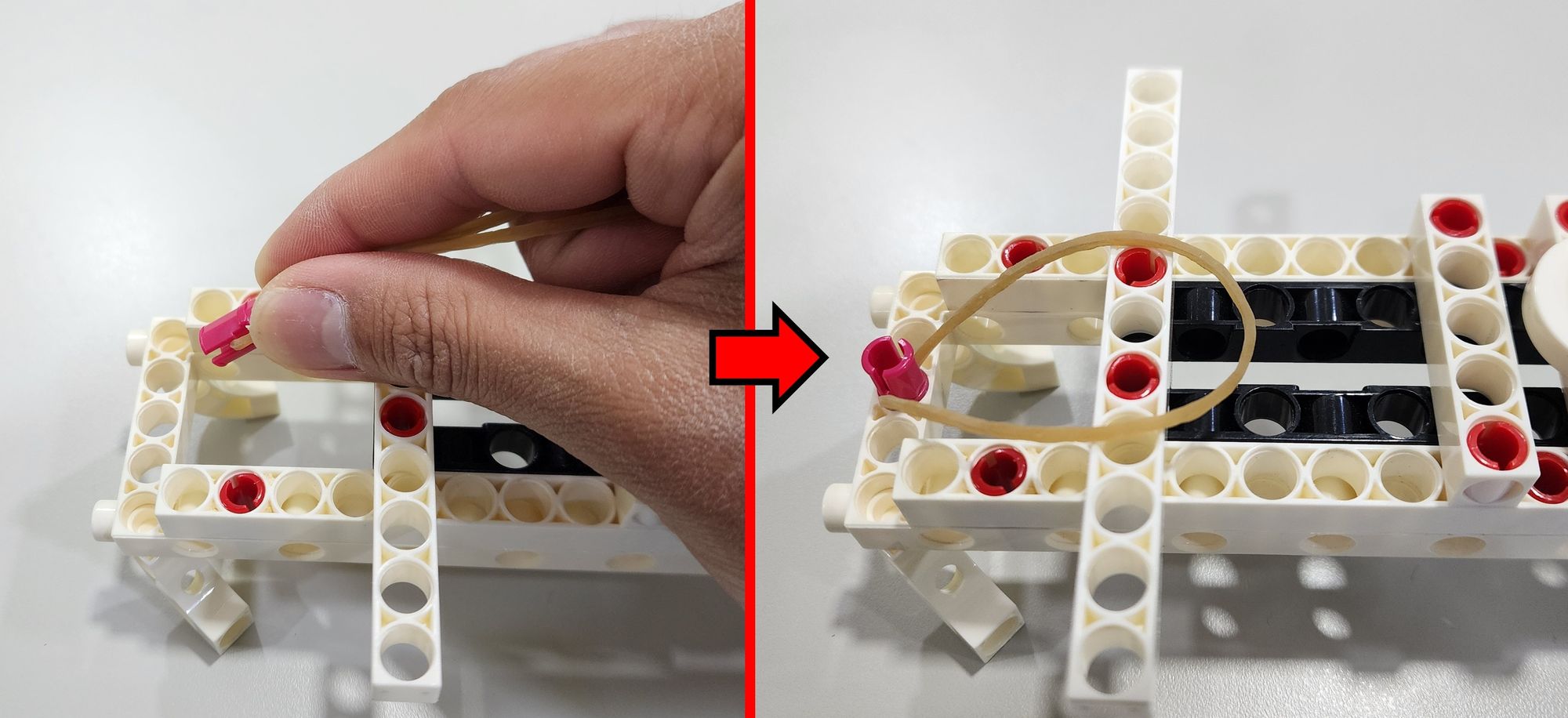
接著將橡皮筋的另一端同樣套入20mm 軸扣鍵的溝槽,並依照圖示將20mm 軸扣鍵安裝在伸縮桿的5孔長條上,橡皮筋就固定好囉(圖十二)。
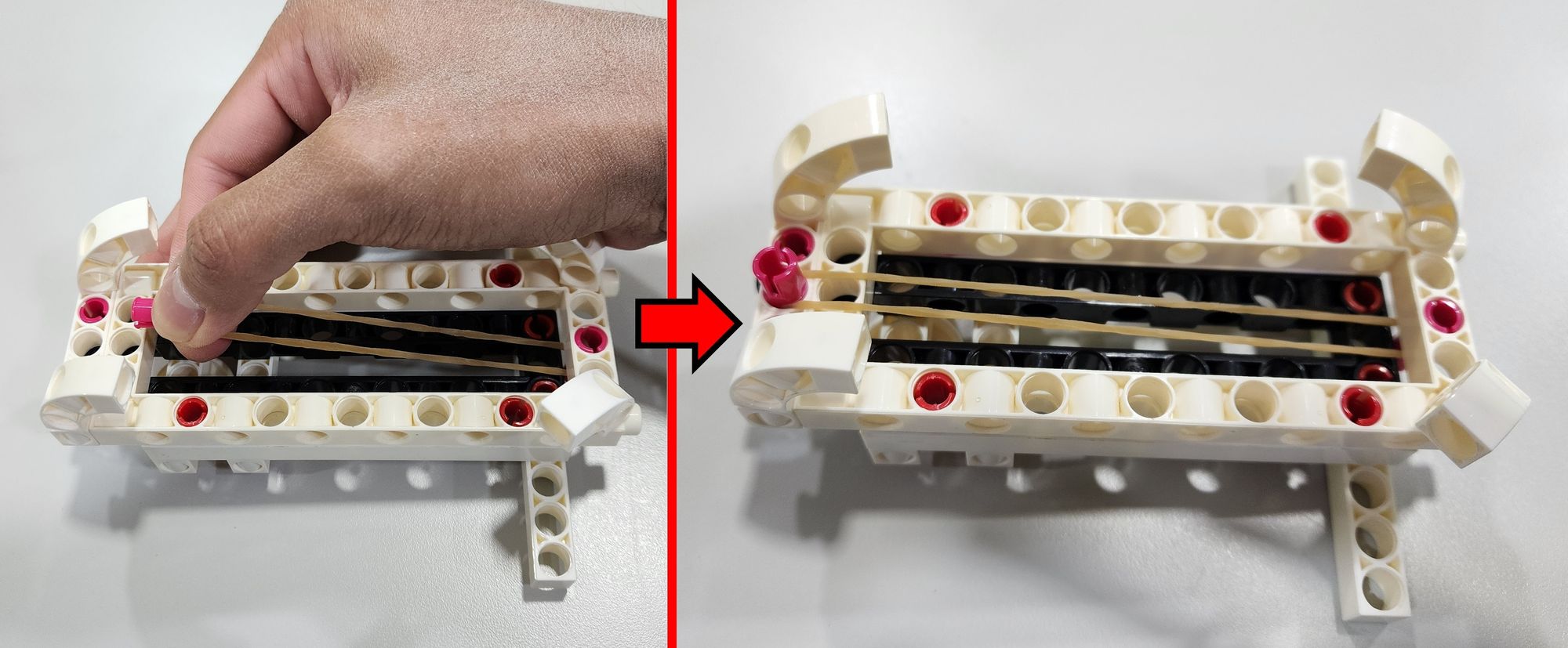
現在要進行滑動機構的測試,當我們將伸縮桿拉出來時,橡皮筋會因為受力而產生形變;當我們放手時,伸縮桿會因為彈力的作用滑動回原本的位置(影片一)。
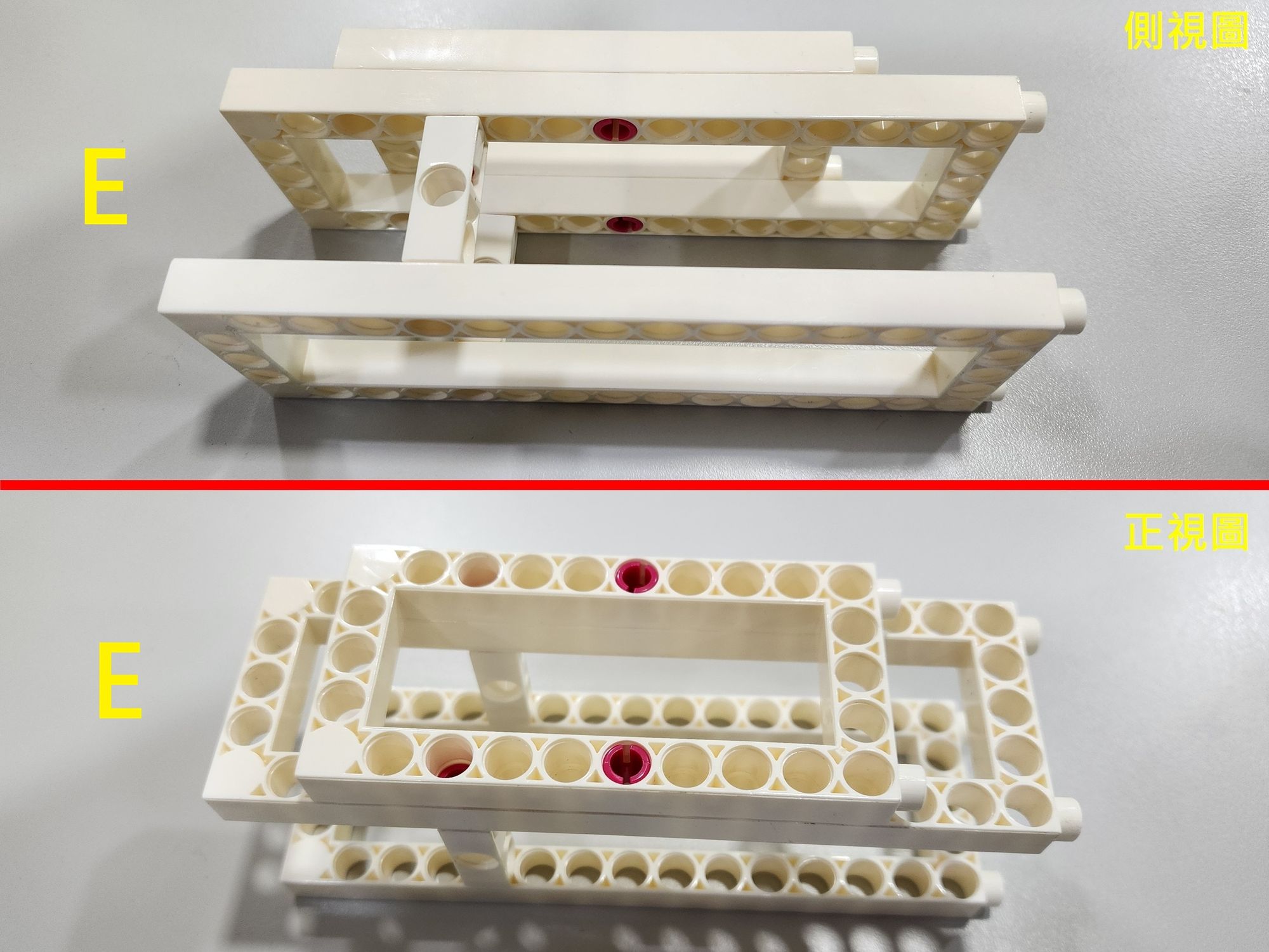
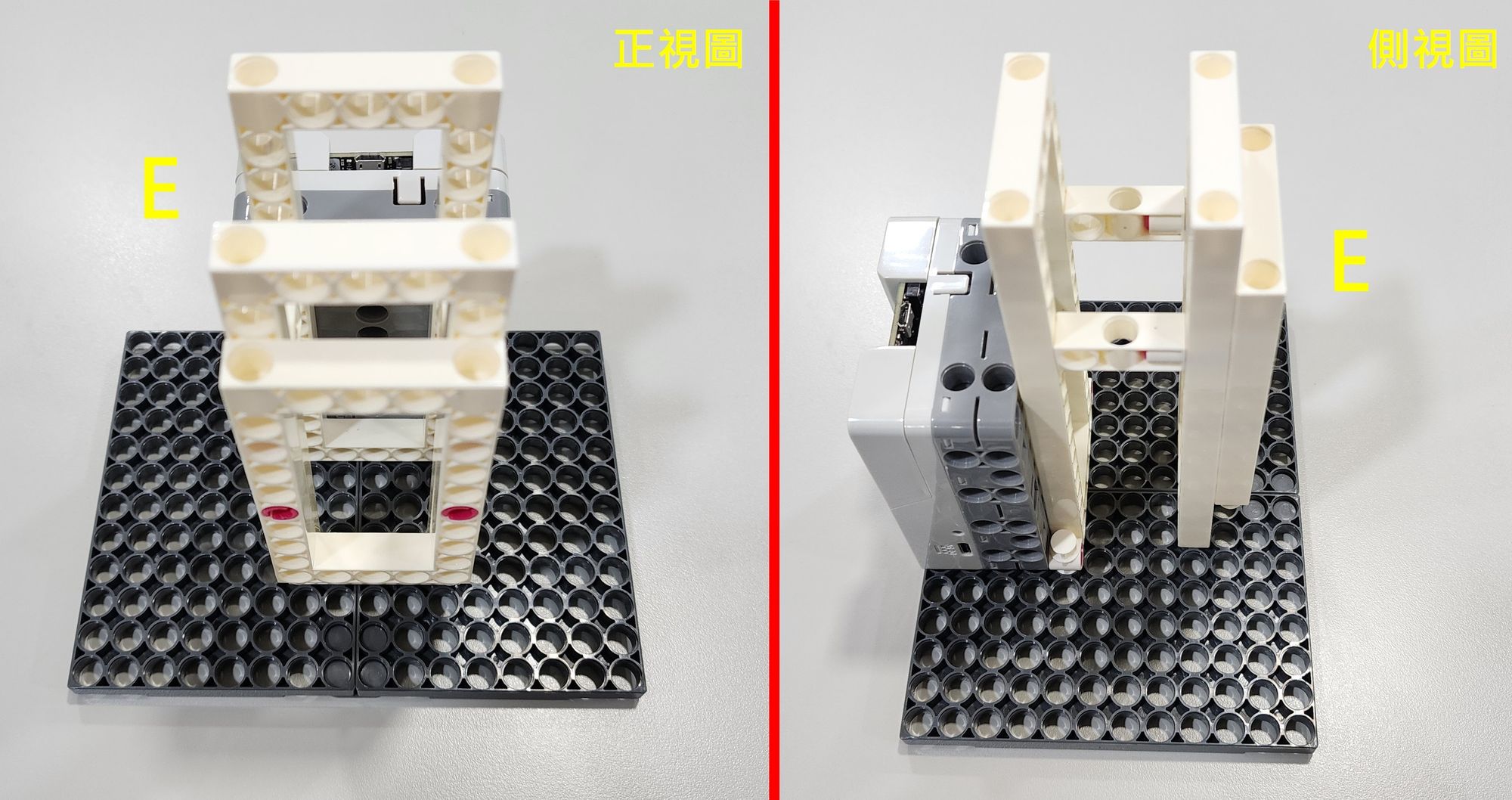
第五步我們要製作搖步機的支架,需要使用到5×15孔長方框、5x10孔長方框、3孔超長條以及20mm 軸扣鍵(圖十三),依照圖示將零件組裝成部件E(圖十四、十五)。
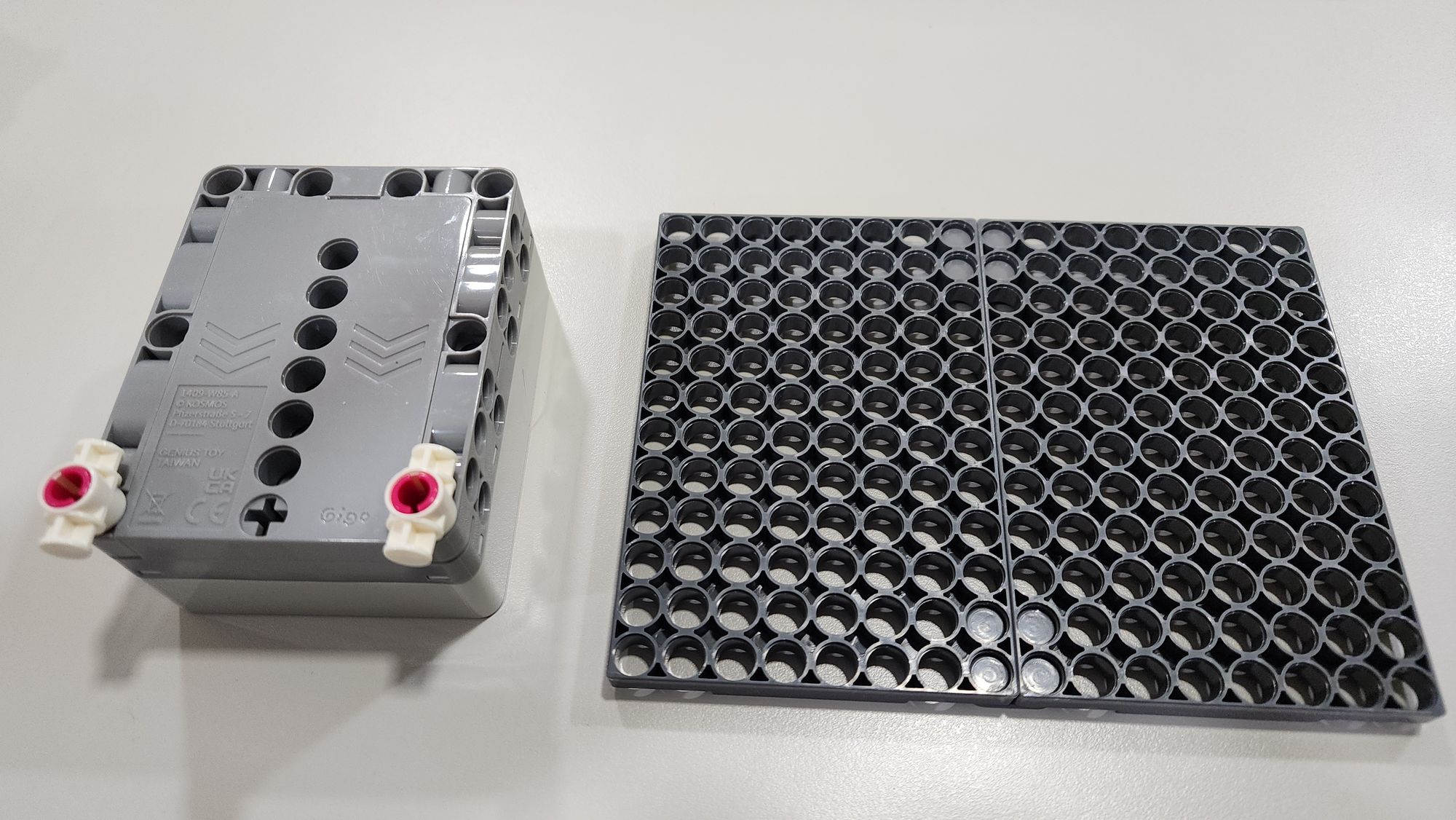
第六步我們要製作搖步機的底座,需要使用到micro:bit 智能主控盒、8×12底盤、2凸單孔轉向結合器、底盤結合器、以及栓扣鍵(圖十六),依照圖示使用底盤結合器結合8×12底盤,並使用栓扣鍵將2凸單孔轉向結合器安裝在micro:bit 智能主控盒下方(圖十七)。

接著依照圖示將部件E和micro:bit 智能主控盒安裝在8×12底盤上方(圖十八)。
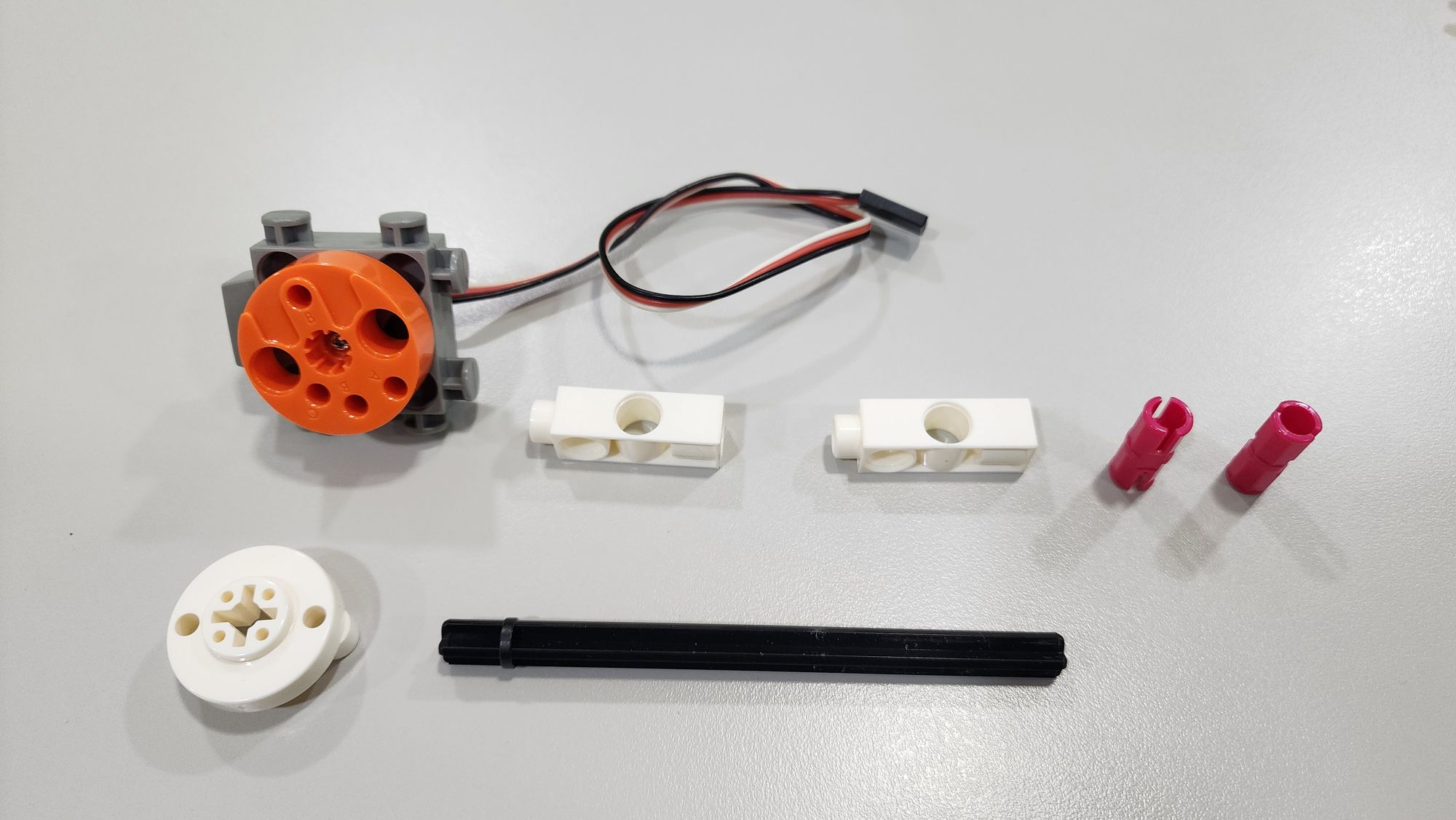
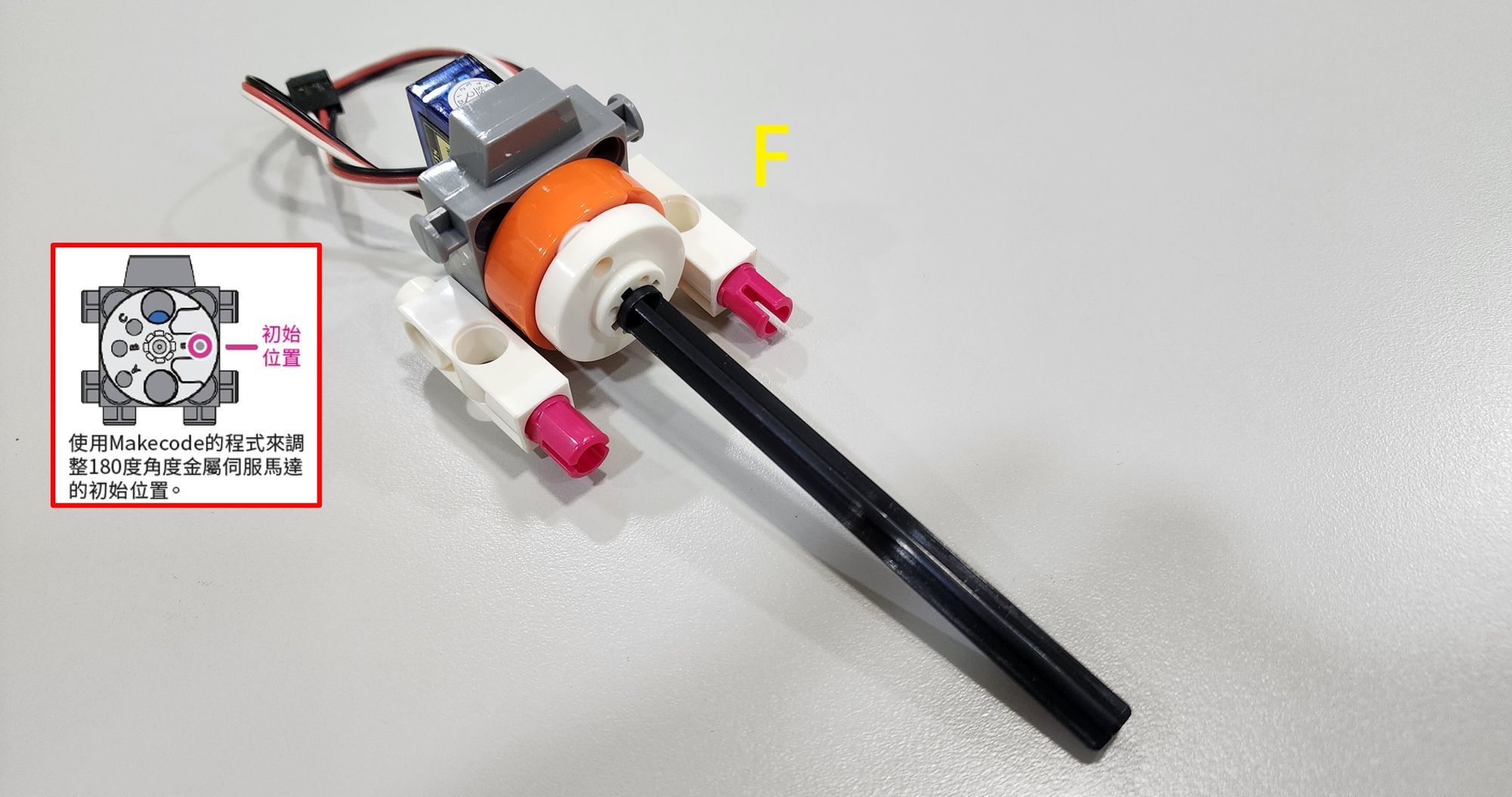
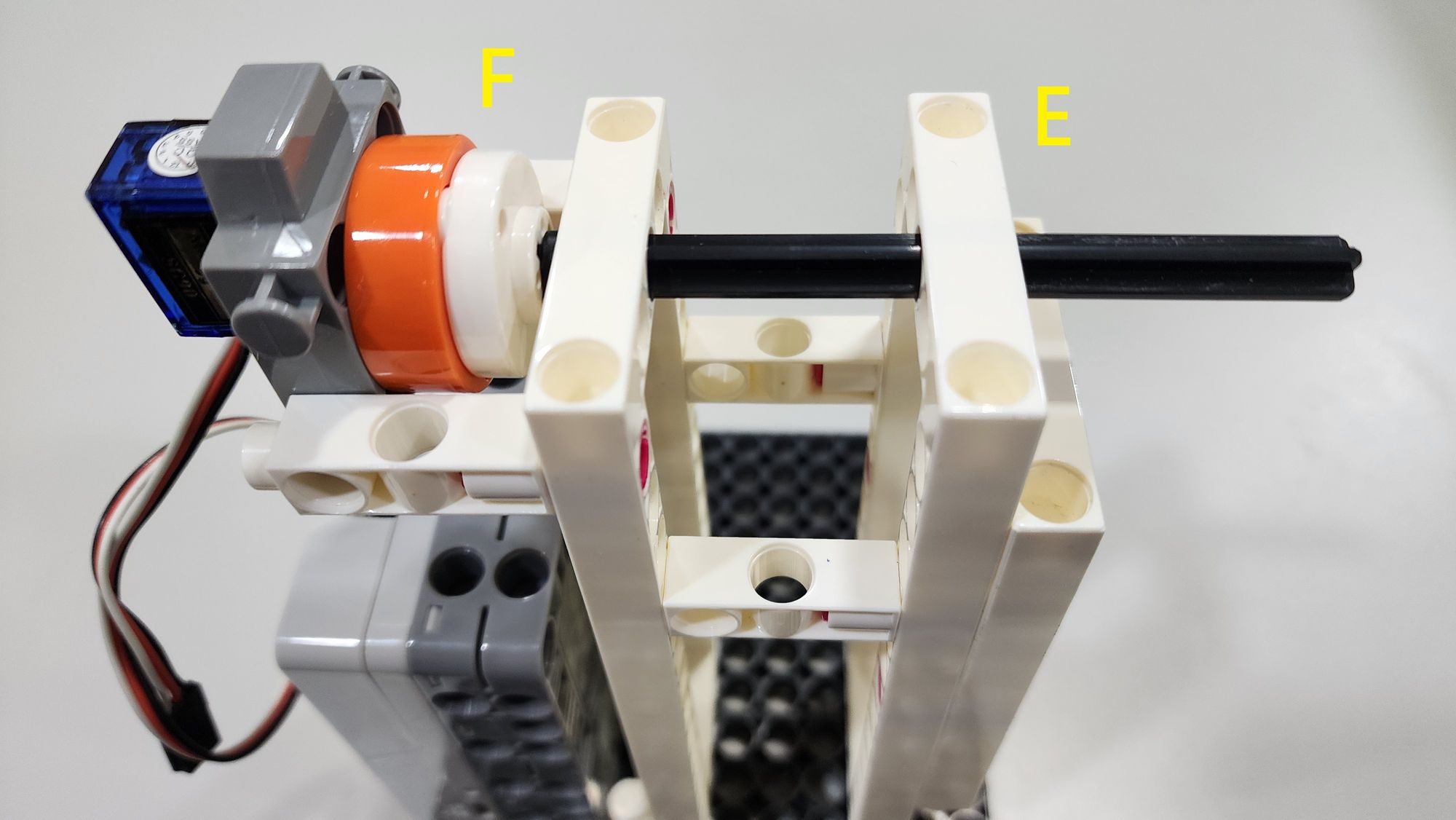
第七步我們要製作搖步機的底座,需要使用到180度角度金屬伺服馬達、3孔超長條、軸轉接器、100mmⅡ軸、以及栓扣鍵(圖十九),首先使用Makecode程式將180度角度伺服馬達的角度調整到90度,再依照圖示將零件組裝成部件F(圖二十)。
接著依照圖示將部件F和安裝在部件E上方(圖二一)。
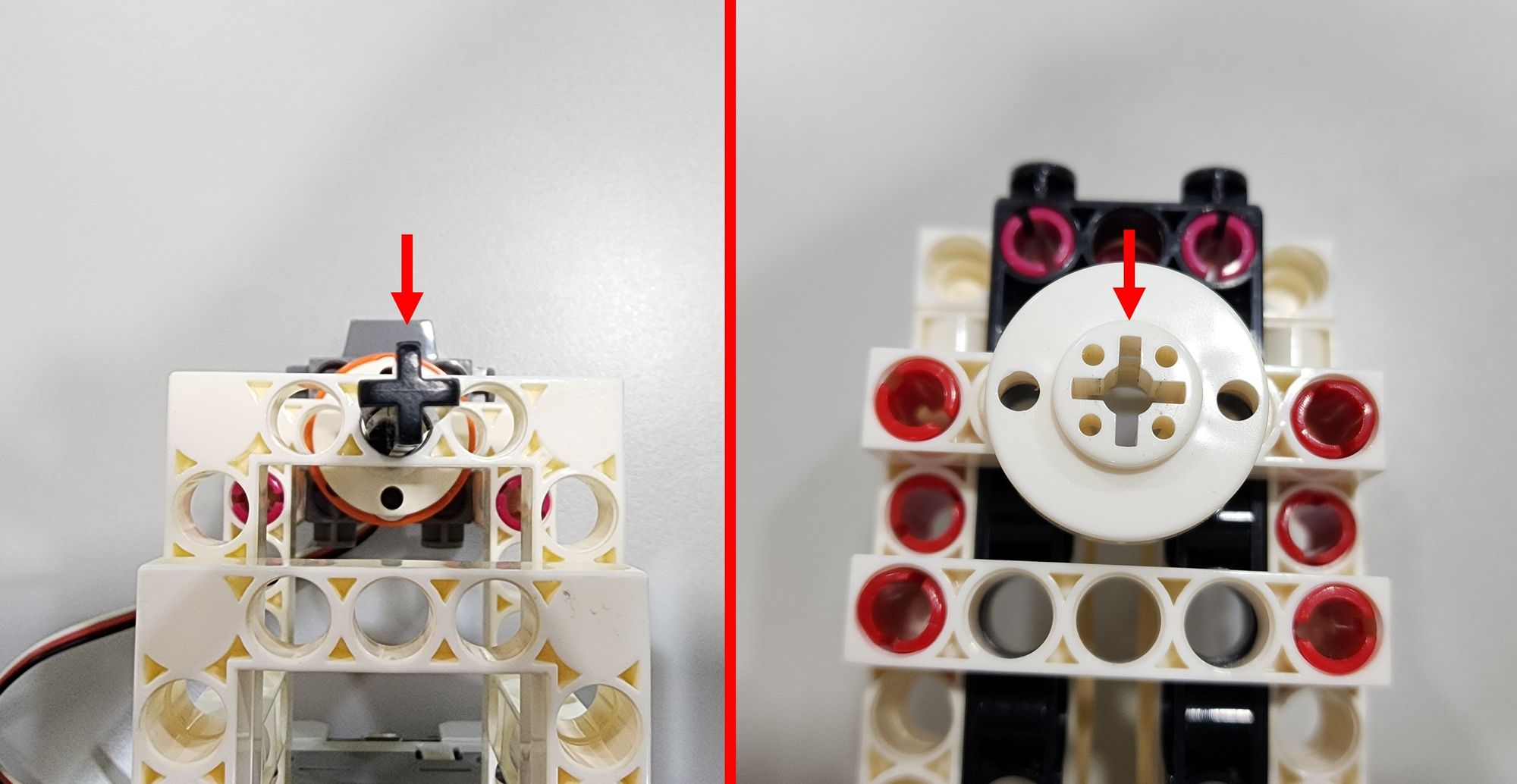
第八步我們要將手機架與支架結合,對準紅色箭頭的方向(圖二二),將100mmⅡ軸插入手機架上的軸轉接器(圖二三)。
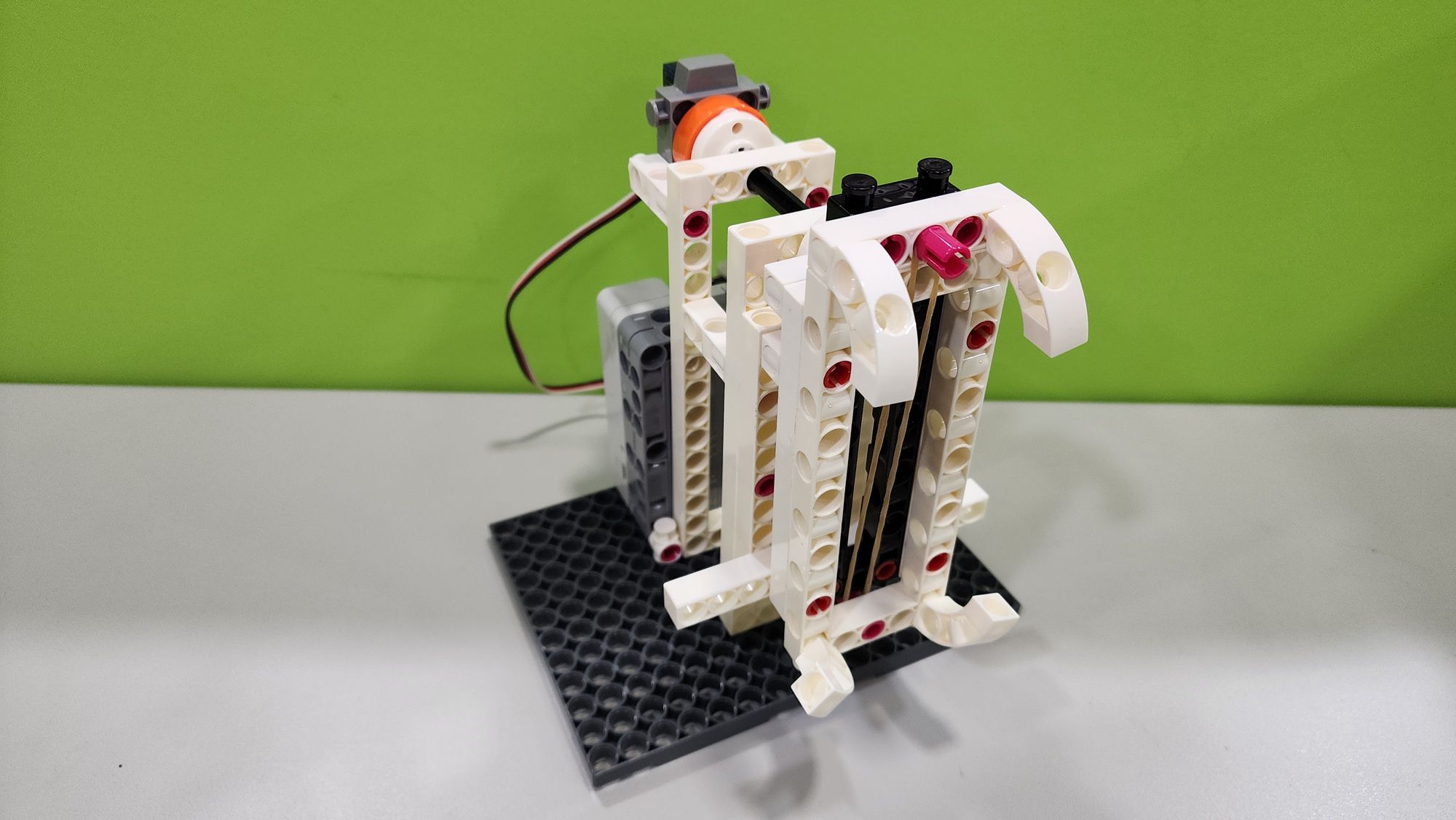
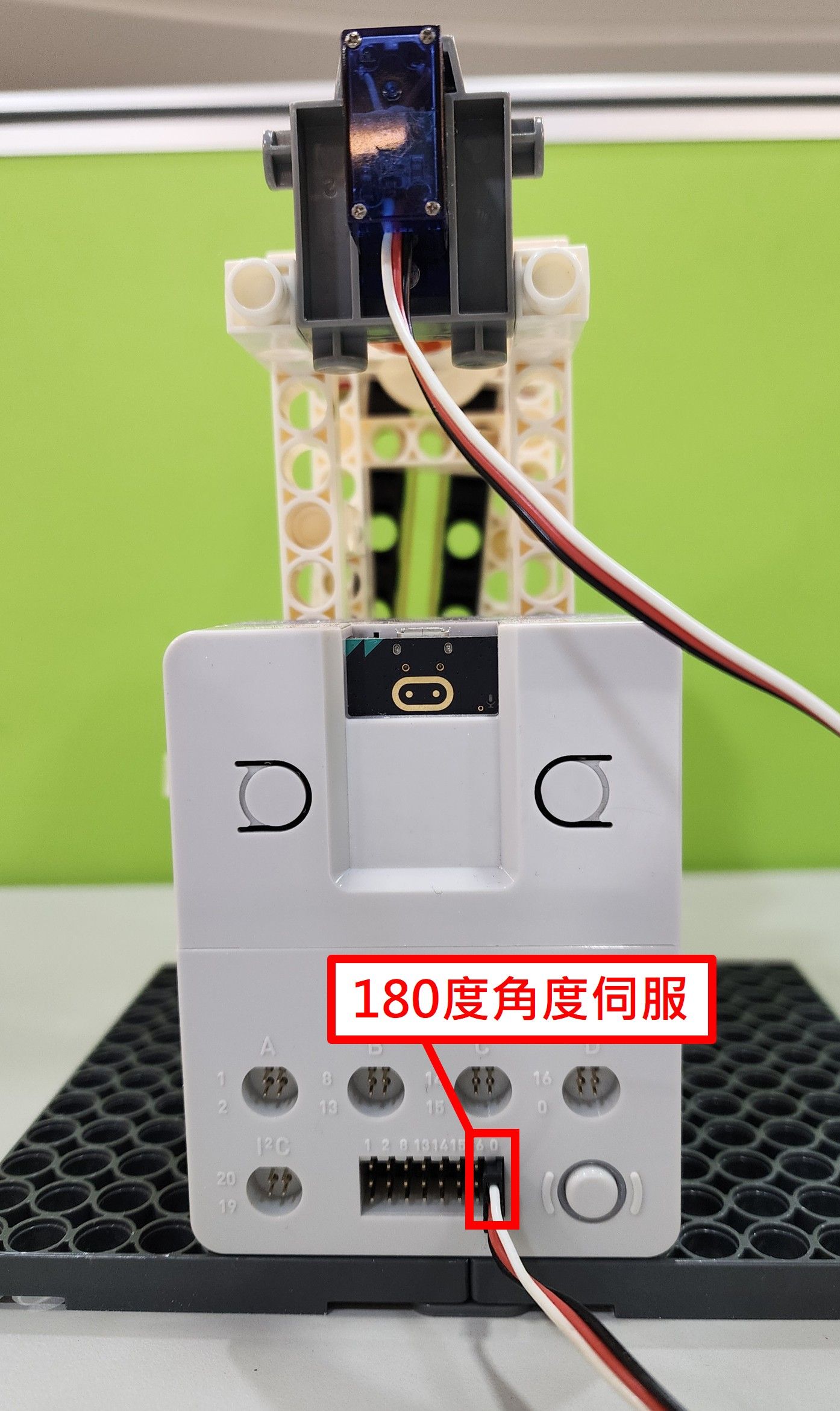
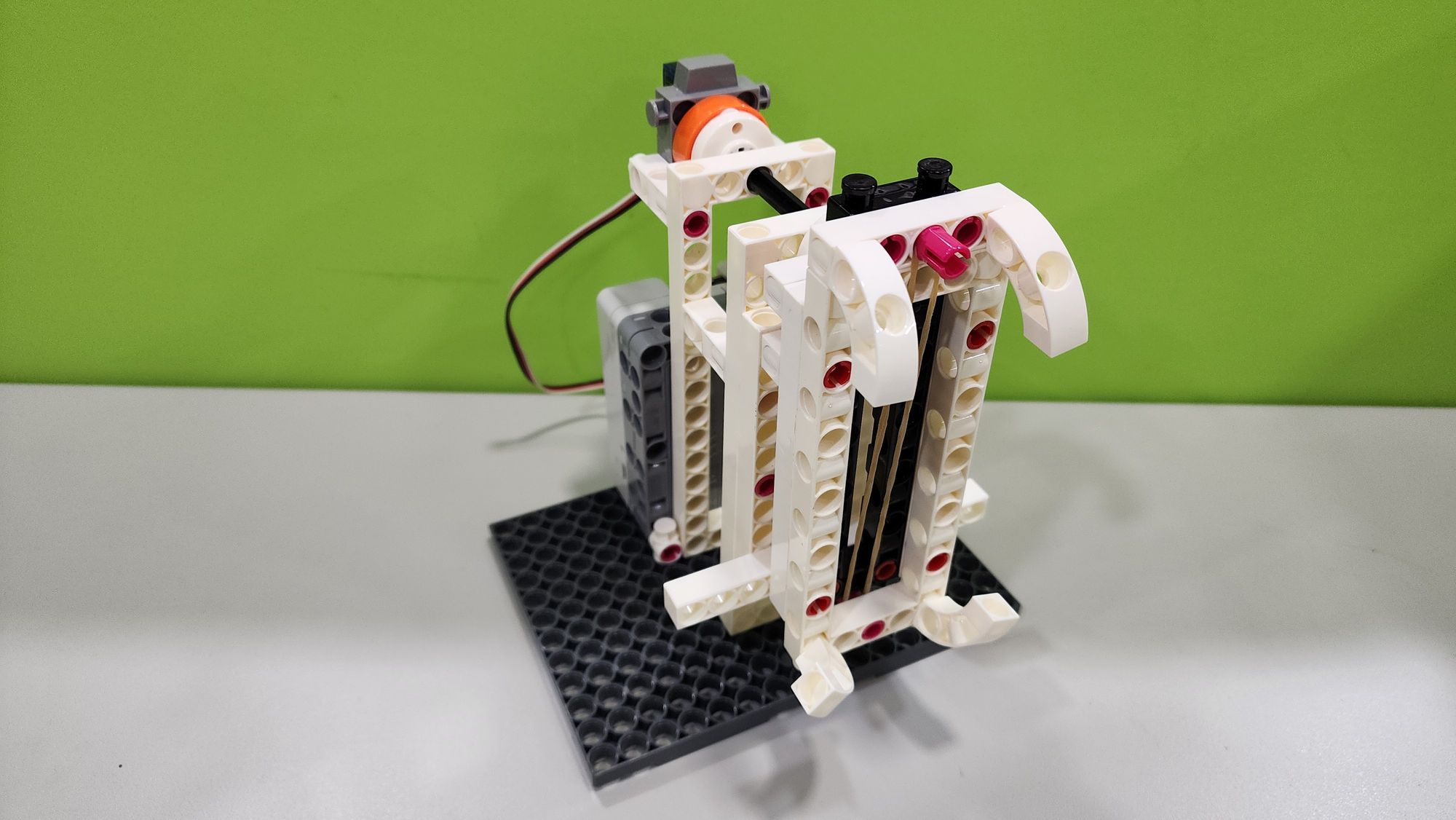
最後將180度角度伺服馬達的杜邦接頭安裝在腳位0(圖二四),搖步機的模型就完成囉(圖二五),現在就讓我們一起來進行程式的編寫吧!
◆ 程式編寫
在編寫程式前,要先請大家進入下列的雲端資料夾,將"搖步機範例程式"的檔案下載至電腦,並透過micro:bit程式編輯網頁來匯入搖步機的範例程式。

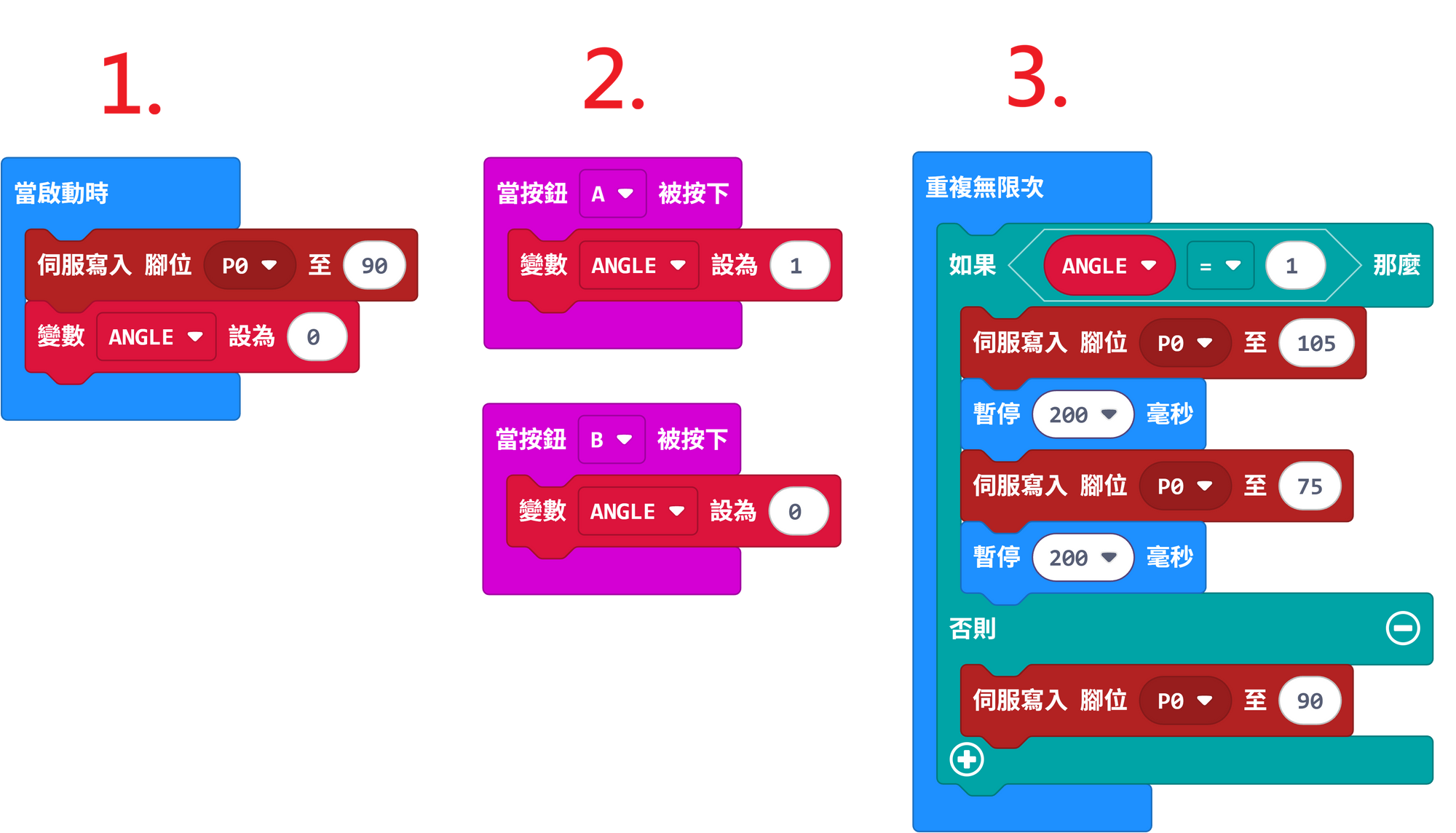
當我們成功匯入後,便能夠看到下列程式方塊(圖二六),相關的程式說明如下:
1. 當主控盒啟動時,將180度角度伺服馬達的角度設為90度,將變數ANGLE設為0,這個變數能夠用於控制搖步機的啟動與否。
2. 當按下按鈕A時,將變數ANGLE設為1(啟動搖步機);當按下按鈕B時,將變數ANGLE設為0(關閉搖步機)。
3. 當變數ANGLE設為1時,讓180度角度伺服馬達的角度在75度與105度之間來會變化,否則讓角度維持在90度。
◆ 模型操作
現在就讓我們來操作搖步機吧!首先需要將手機固定在手機架上,接著啟動主控盒後按下按鈕A,手機便會快速左右搖擺,產生雙腳移動的效果,手機的計步器也會開始計算步數,當按下按鈕B時,能夠讓搖步機停止擺動(影片一)。
◆結語
透過這次搖步機的製作過程,我們不僅親手賦予了積木動態的生命力,更在組裝的過程中觀察到機械結構與軟體運作的奧秘。大家可以嘗試加入不同的裝飾,打造出更有個人風格的搖步機,或是修改程式產生不規律地擺動,防止應用程式鎖定步數。每一次的調整與測試,都是鍛鍊邏輯思考與解決問題的最佳機會,並在未來學習的過程中提供最大的助力,創作出更多有趣的機械模型!
今天的分享就到這邊,喜歡這篇文章的話記得幫浣熊老師大力分享出去,我們下次見囉,拜拜!
◆科學原理:
搖步機使用了角度伺服馬達(Servo Motor)來控制手機的搖擺角度,角度伺服馬達又稱為舵機(圖二七),而它與一般馬達的差別在於馬達在通電後會不斷的轉動,而透過程式能夠控制馬達的旋轉方向與旋轉速度;角度伺服馬達則是向指針一樣,能夠透過程式精確固定在特定的角度,或在一定的區間轉動(常見為0度~180度,部分能達到360度)。廣泛應用於機器人關節、航模轉向、攝影雲台、工業自動化裝配線及自動開關門等精密控制領域。

◆課綱參考:
INf-Ⅲ-2 科技在生活中的應用與對環境與人體的影響。
生 k-V-1 能了解工程與設計的基本知識,如:工程設計流程、動力機構、 結構設計、工程材料、機電控制等。
生 A-V-1 機構與結構的設計與應用。
#Gigo智高#學習實驗室#趣味實驗室#Gigo Lab#教具系列
◆參考資料:
 維基媒體項目貢獻者
維基媒體項目貢獻者
 維基媒體專案貢獻者
維基媒體專案貢獻者

Please sign in to vote.