生活中的科學EP22-遙控賽車

大家好我是浣熊老師,各位有玩過遙控車嗎?遙控車是一種可以透過無線電訊號來遠端操控的模型車,通常使用帶有搖桿的遙控器進行操控,車身則隨著功能而有各式各樣的造型,如賽車、越野車、堆高機...等。
我們曾經在生活中的科學EP6中製作了一台簡易的遙控車,今天浣熊老師要帶大家使用積木來製作一台更加厲害的遙控賽車,並透過Micro:bit來編寫程式,讓你的手機能夠搖身一變成為遙控賽車的遙控器唷!
現在就讓浣熊老師一步步教大家如何製作吧!
◆ 組裝步驟
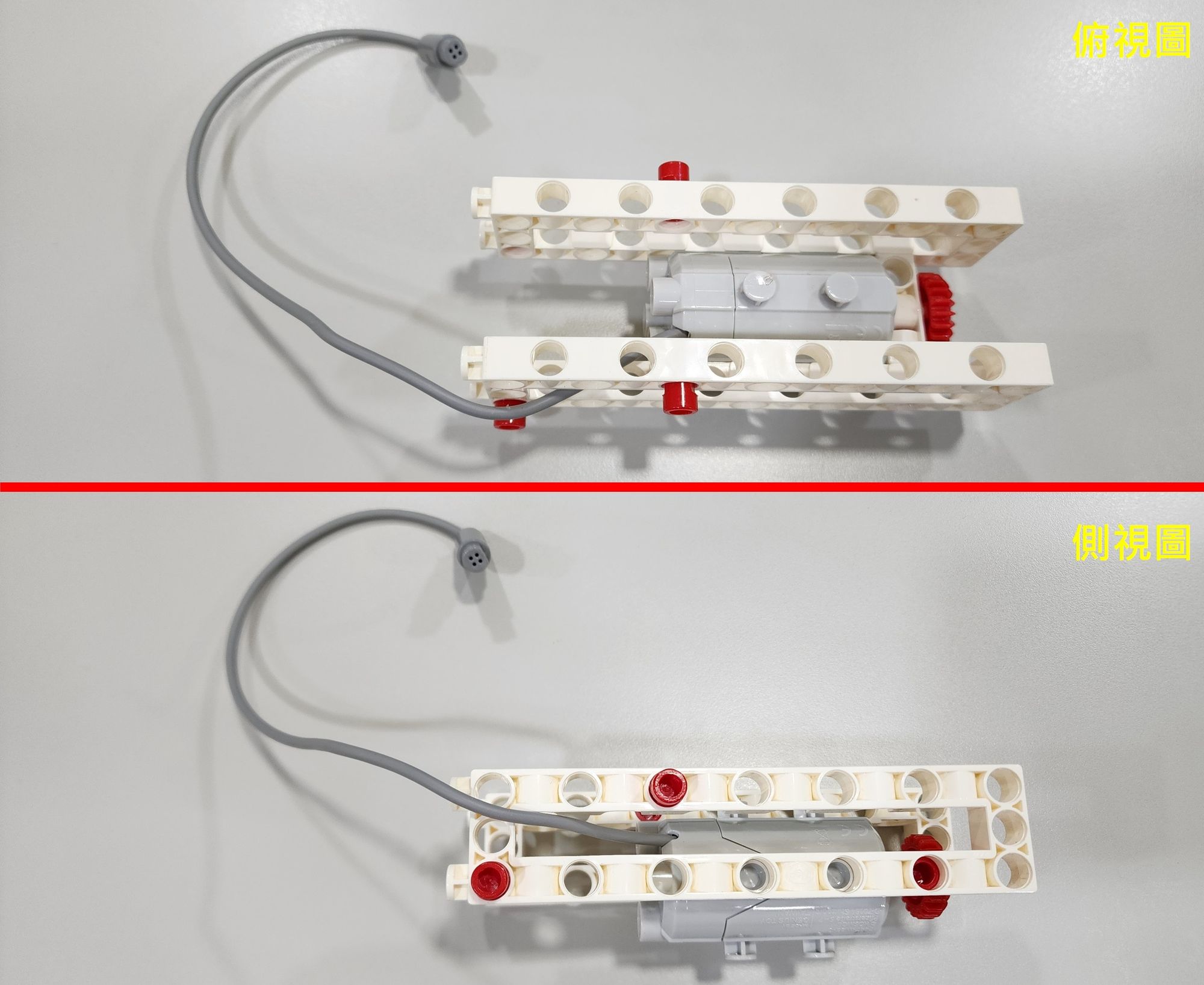
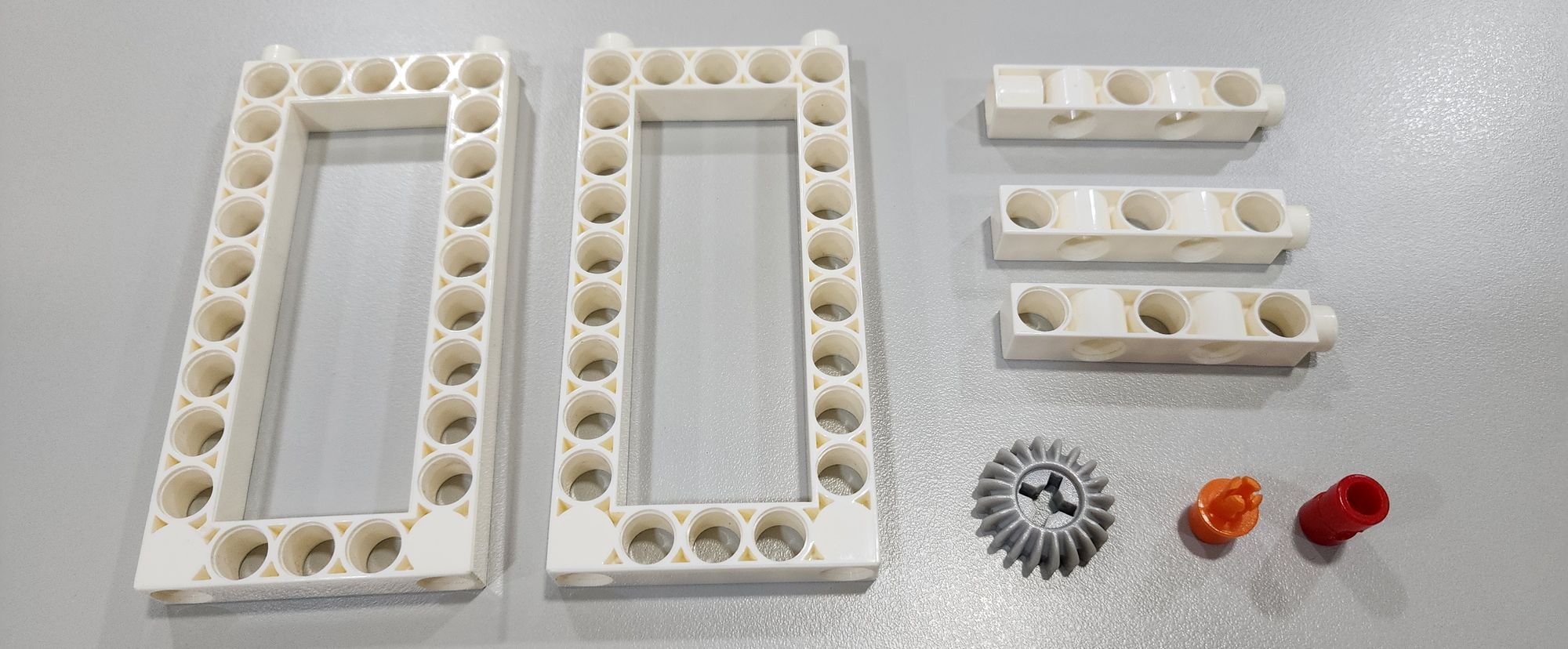
第一步我們要製作出車體的結構,需要使用到50倍行星齒輪馬達盒、3孔超長條、20T齒輪、27mm馬達短軸、3x13孔超長方框以及長結合鍵(圖一),並依照圖示將他們安裝在一起(圖二)。

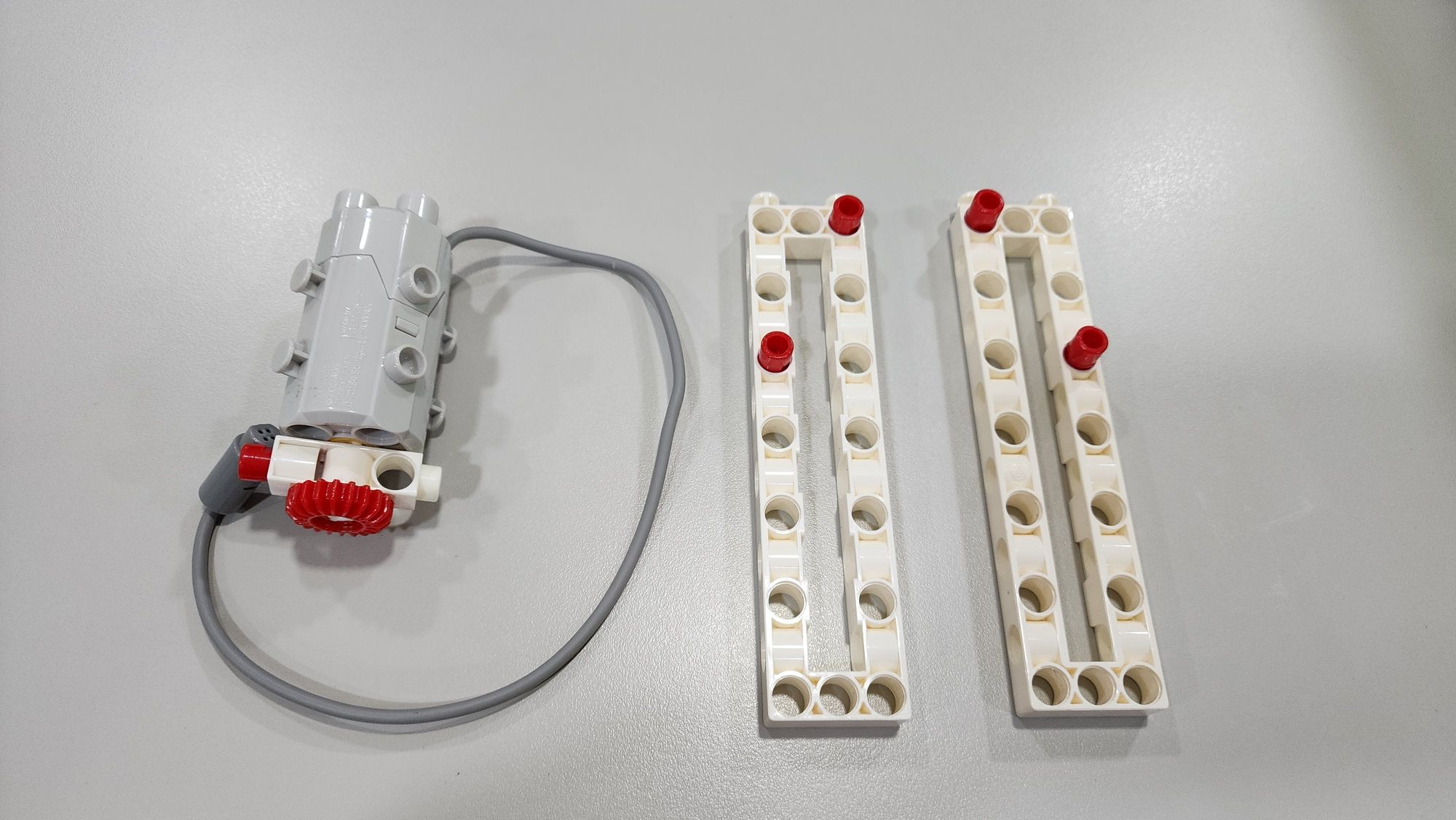
接著將3x13孔超長方框安裝在50倍行星齒輪馬達盒的左右兩側起(圖三),完成車體的結構。
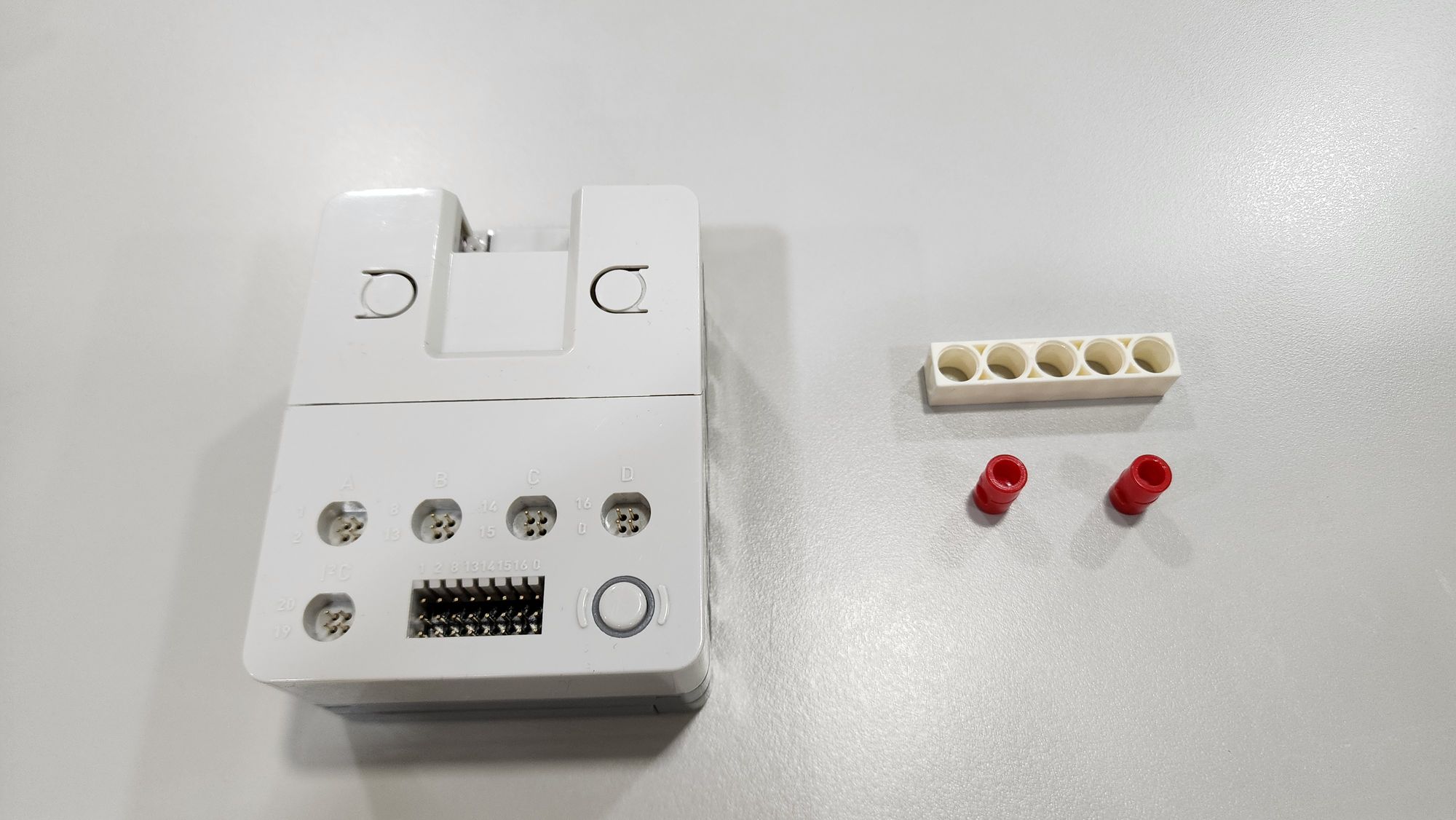
第二步我們要來安裝micro:bit 智能主控盒,需要使用到micro:bit 智能主控盒、5孔超條以及長結合鍵(圖四),依照圖示將他們安裝在一起(圖五)。

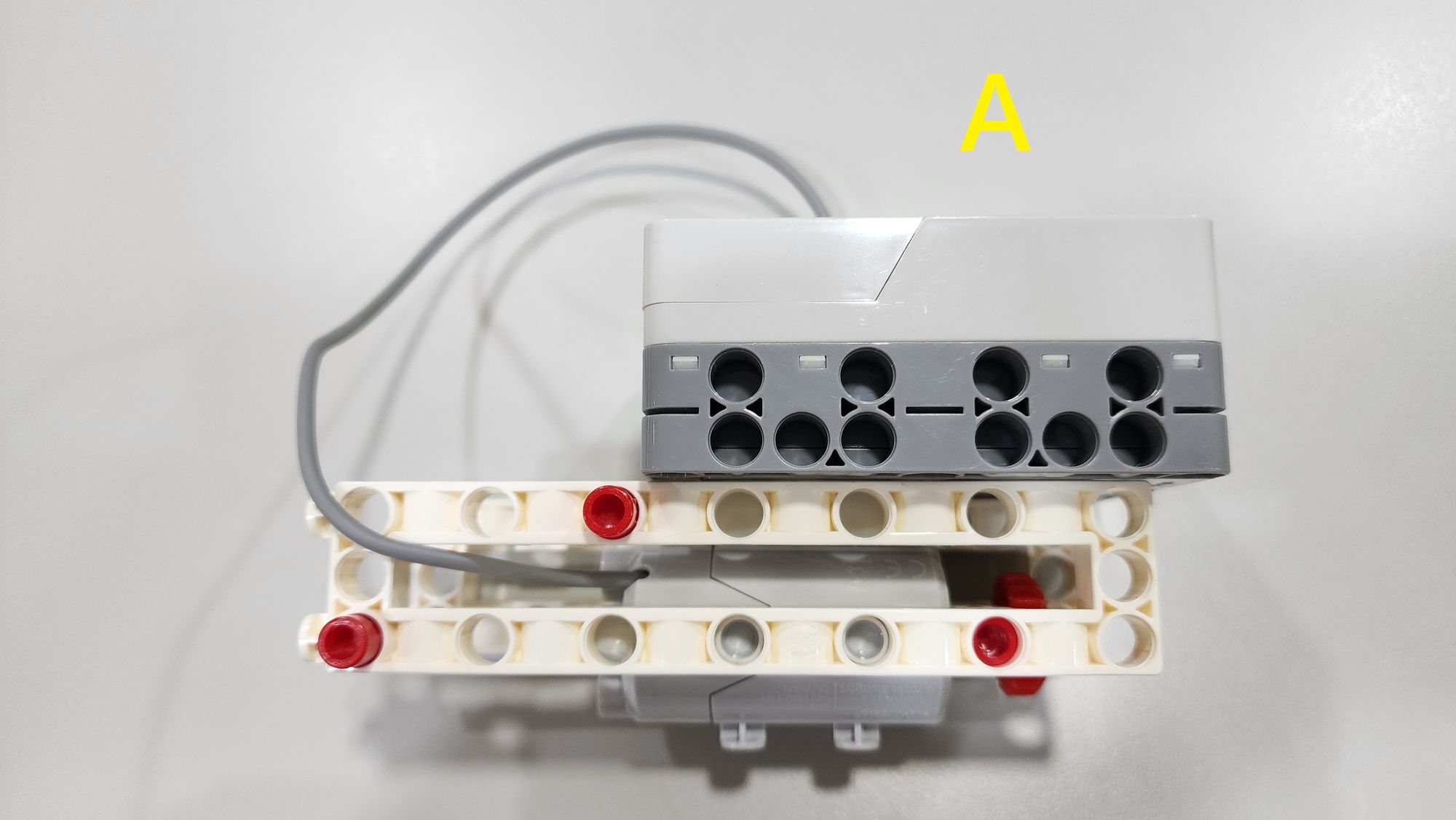
接著將micro:bit 智能主控盒與剛才的車體結合,完成部件A的製作(圖六)。
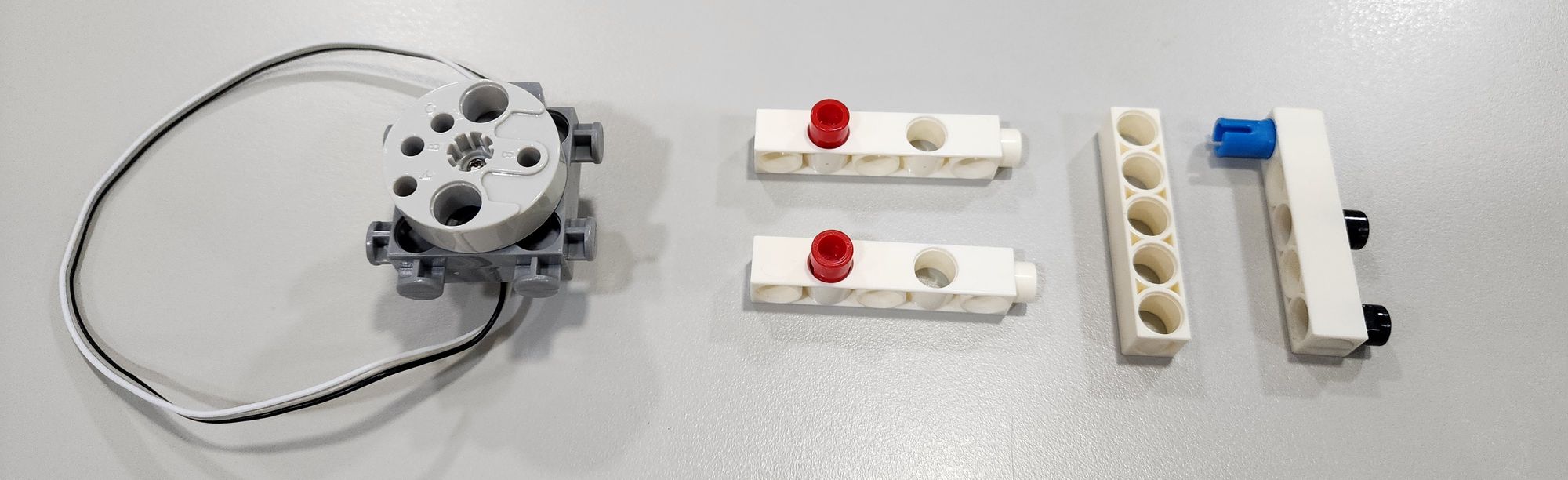
第三步我們要來安裝180度角度伺服馬達,需要使用到180度角度伺服馬達、5孔長條、5孔超長條底無孔、長結合鍵、短結合鍵以及軸扣鍵(圖七),其中要確保180度角度伺服馬達的角度已使用Makecode程式調整至90度,以免遙控賽車在運作時發生失誤,再來依照圖示將零件安裝成好幾個部件(圖八)。

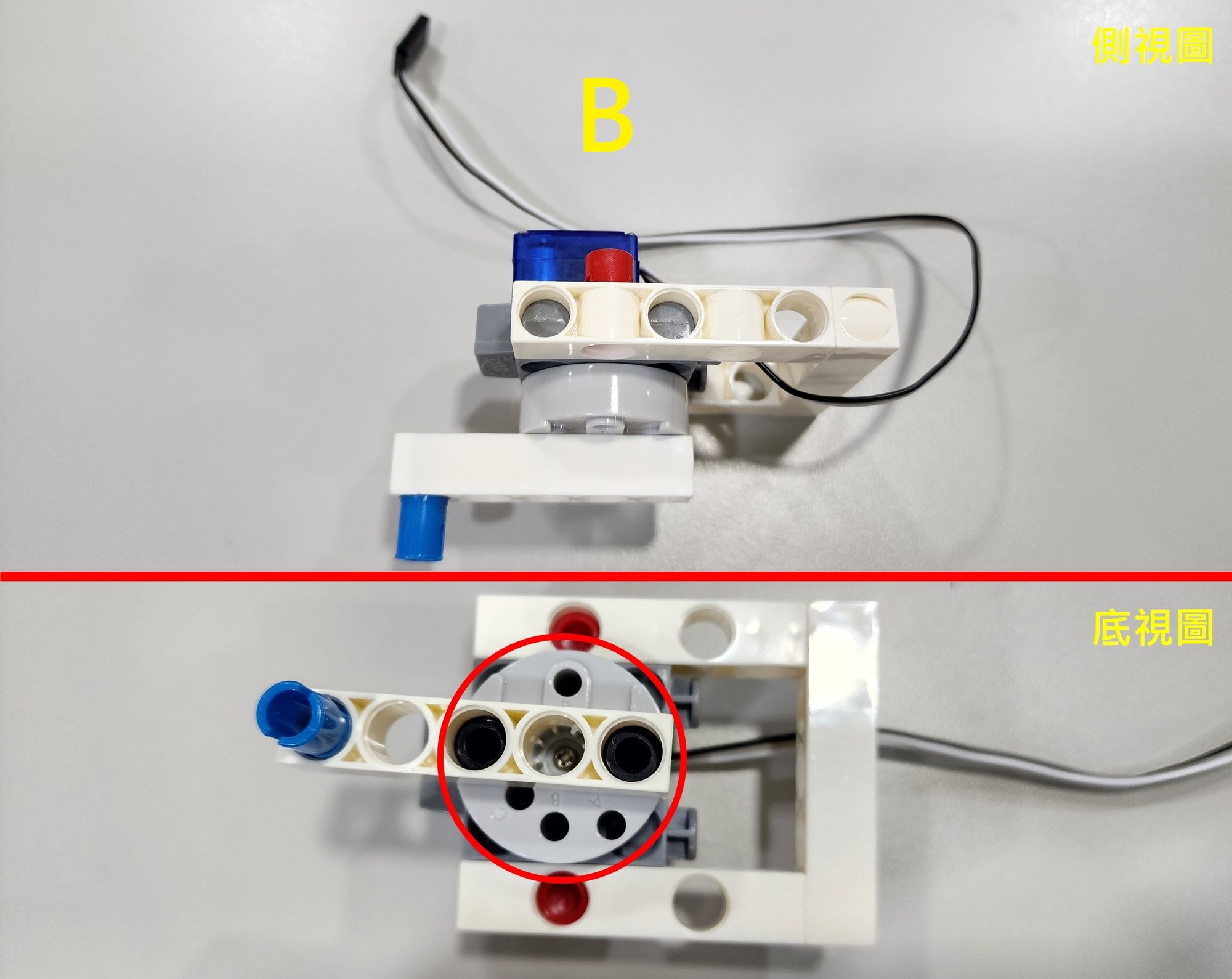
接著將各部件依序結合,完成部件B的製作(圖十),同樣需留意零件安裝在180度角度伺服馬達的方向。
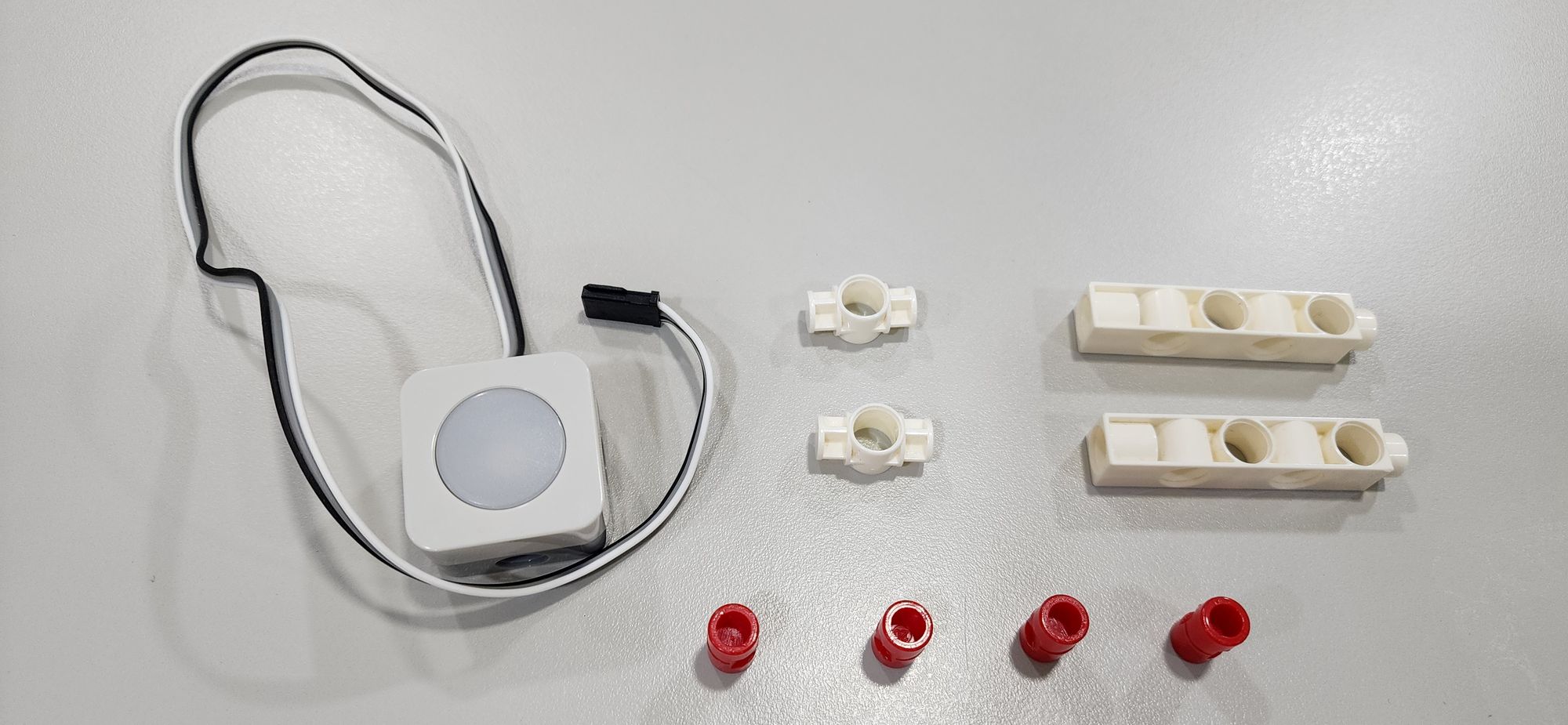
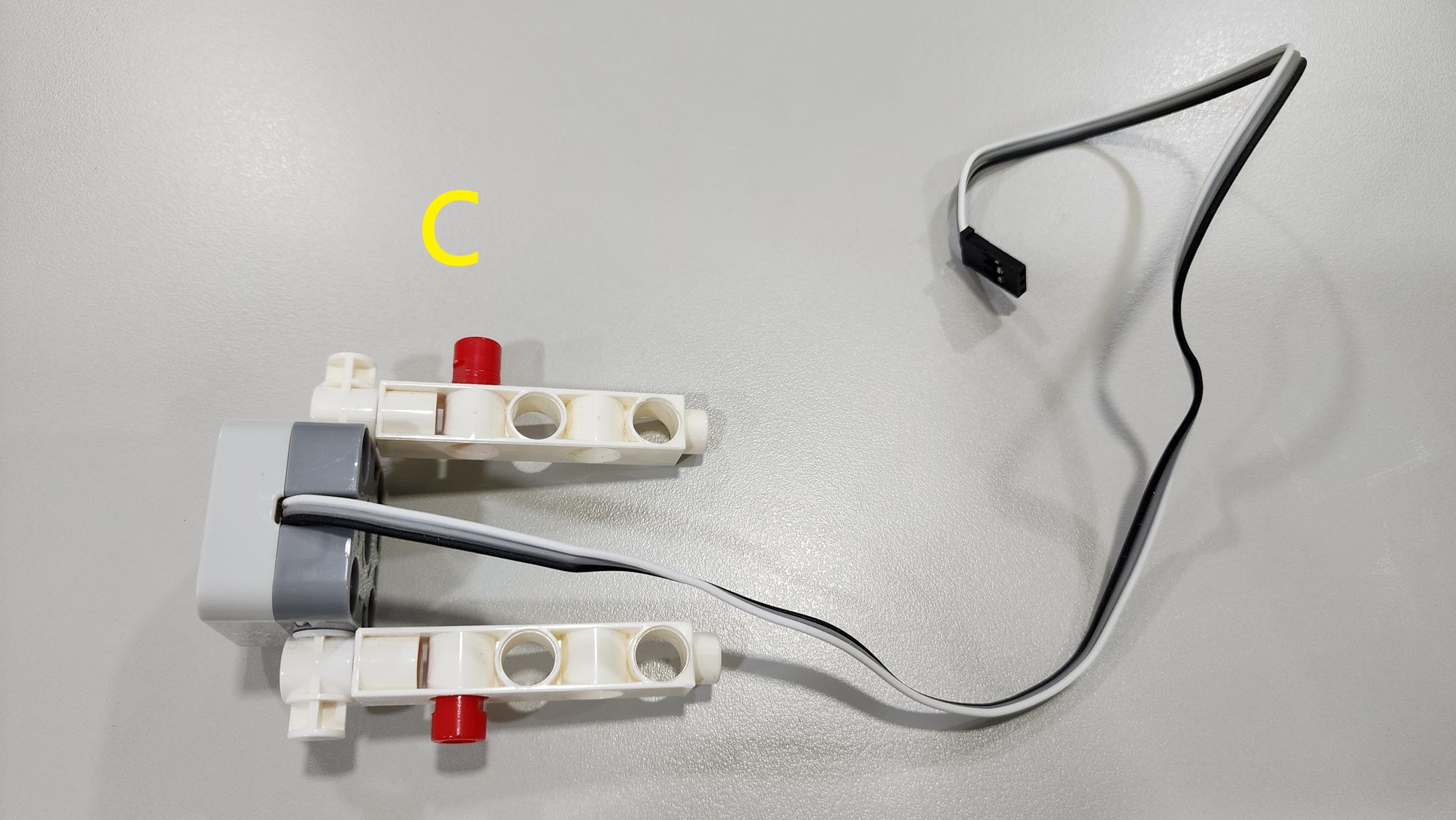
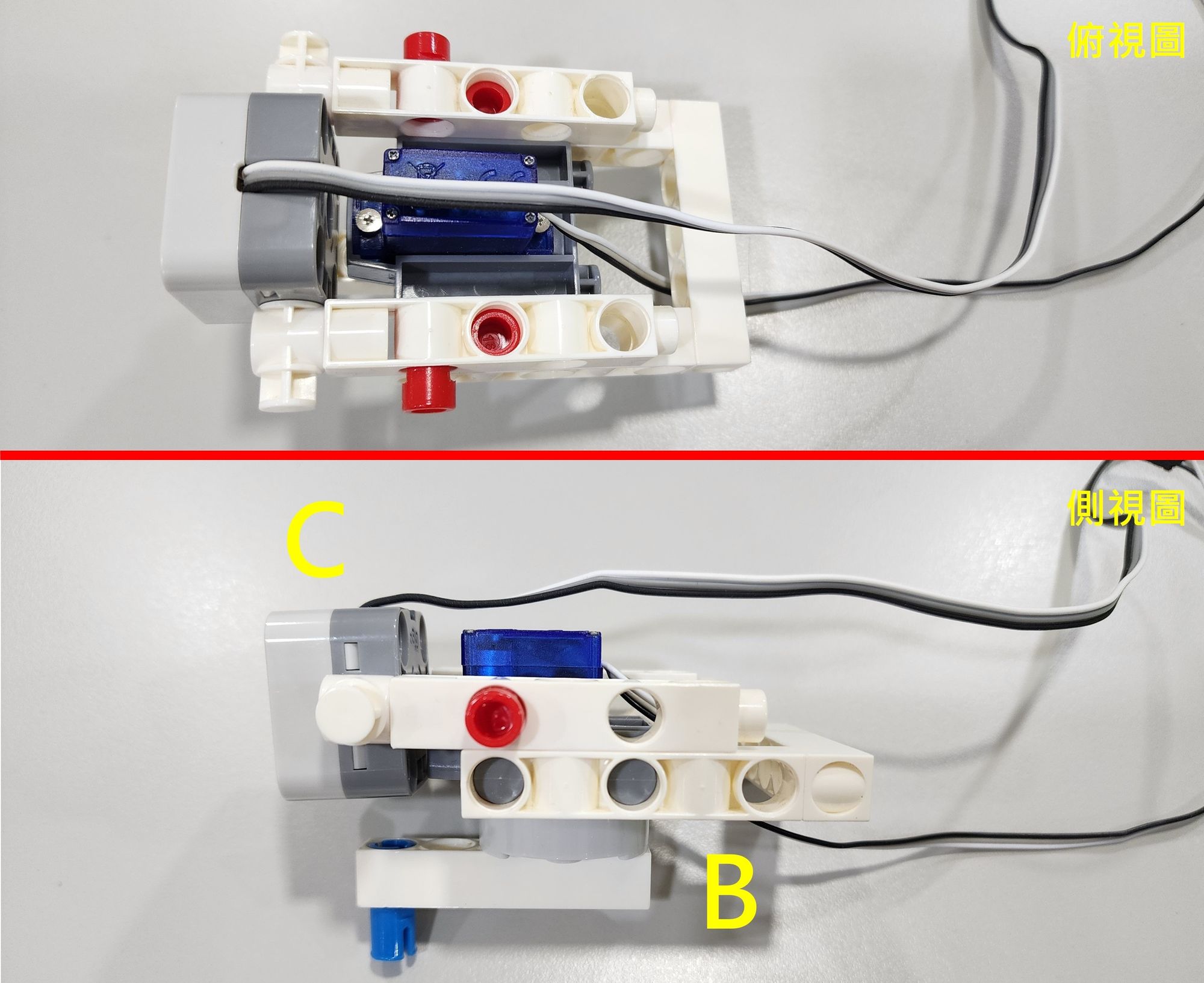
第四步我們要來安裝多色LED燈座,需要使用到180度角度伺服馬達、2凸單孔轉向結合器、5孔超長條以及長結合鍵(圖十),將它們依照圖示安裝在一起,完成部件C的製作(圖十一)。
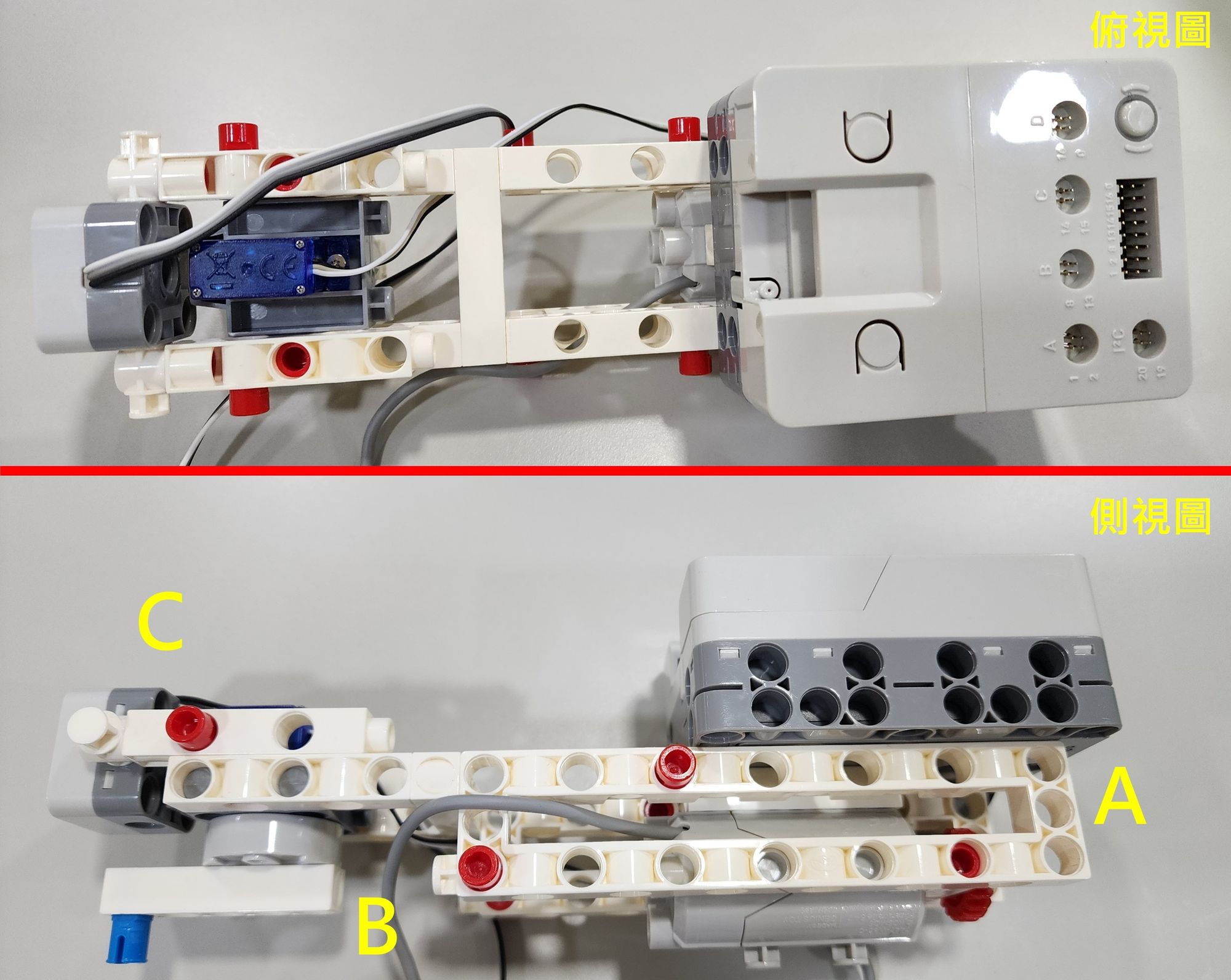
第五步我們要來安裝車頭,將剛才完成部件B和部件C結合(圖十二),並將結合後的部分與部件A結合(圖十三),完成車頭的製作。
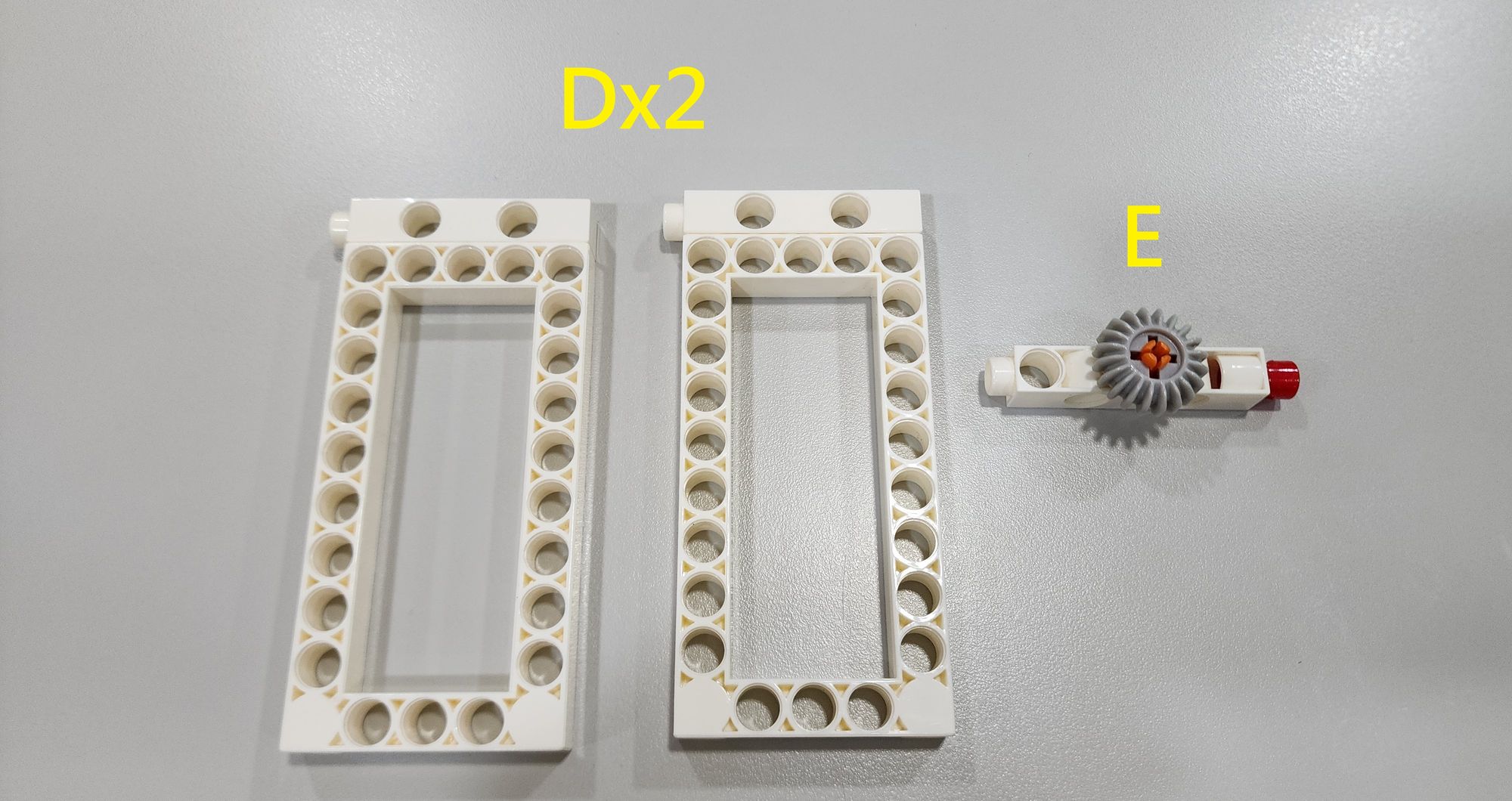
第六步我們要來加固車頭,需要使用到5x10孔長方框、5孔超長條、5孔超長條底無孔、20T齒輪、自轉軸鍵以及長結合鍵(圖十四),將它們依照圖示安裝在一起,完成兩個部件D以及一個部件E(圖十五)。
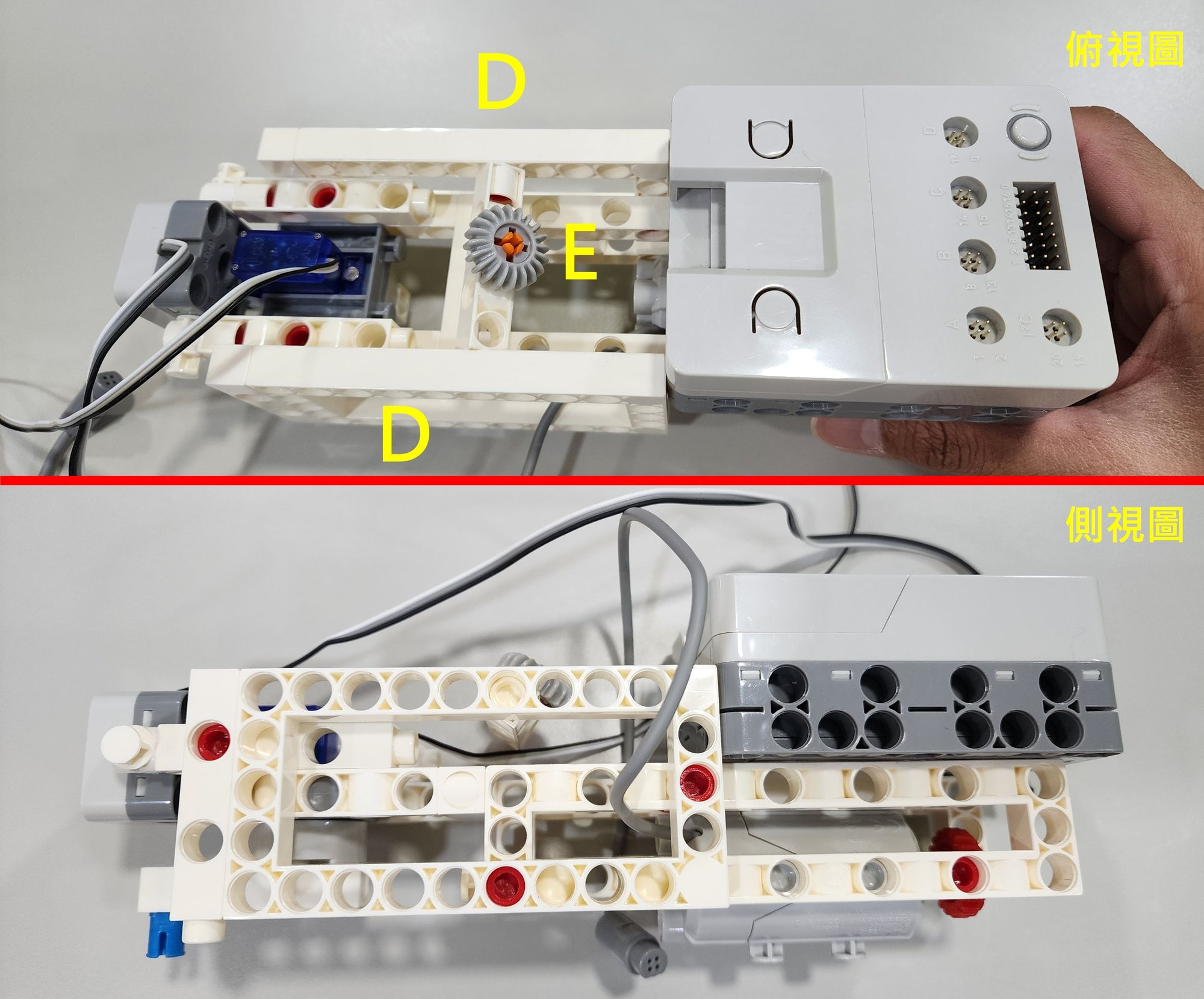
接著將兩個部件D安裝在車身的左右兩側,部件E則安裝在部件D之間(圖十六),完成車頭的加固。
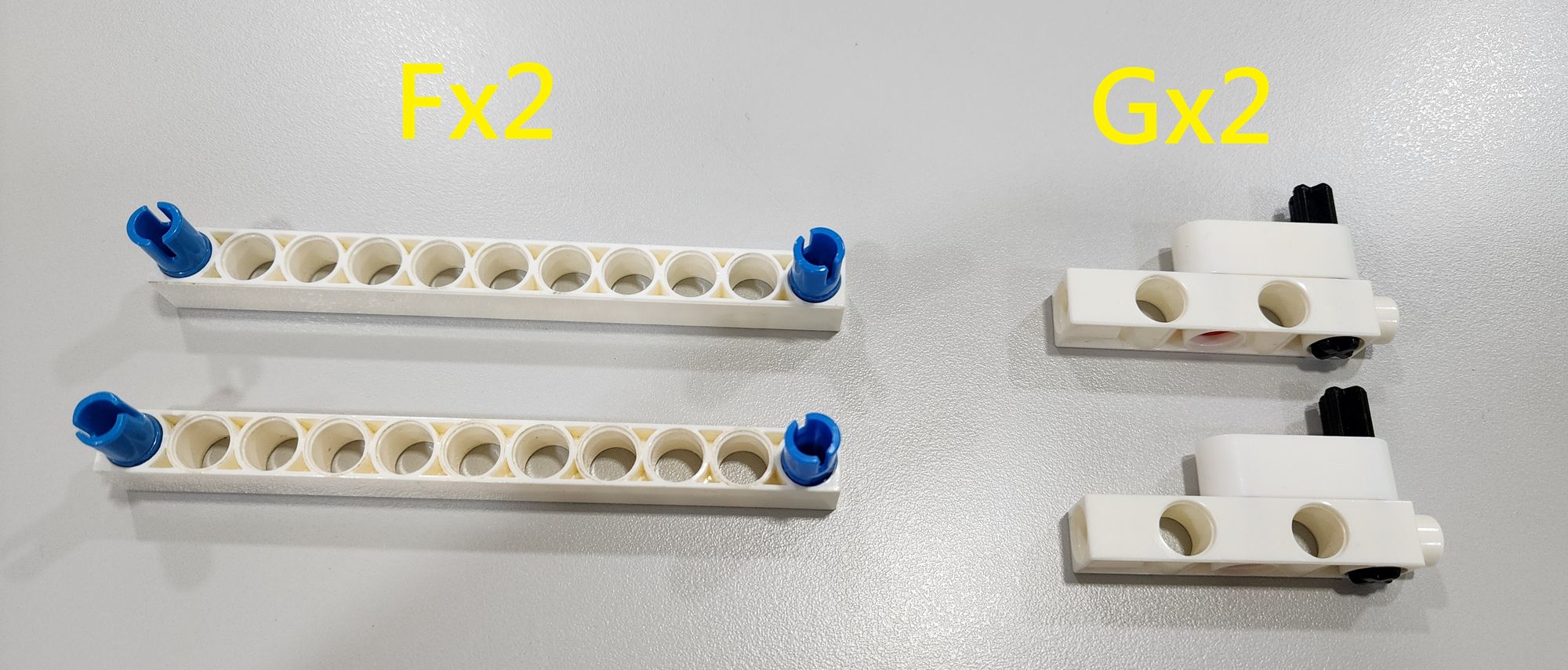
第七步我們要來製作遙控賽車的轉向機構,需要使用到11孔長條、5孔超長條、3孔圓角長條、30mmⅡ軸、軸扣鍵以及長結合鍵(圖十七),依照圖示將它們組裝成兩個部件F以及兩個部件G(圖十八)。

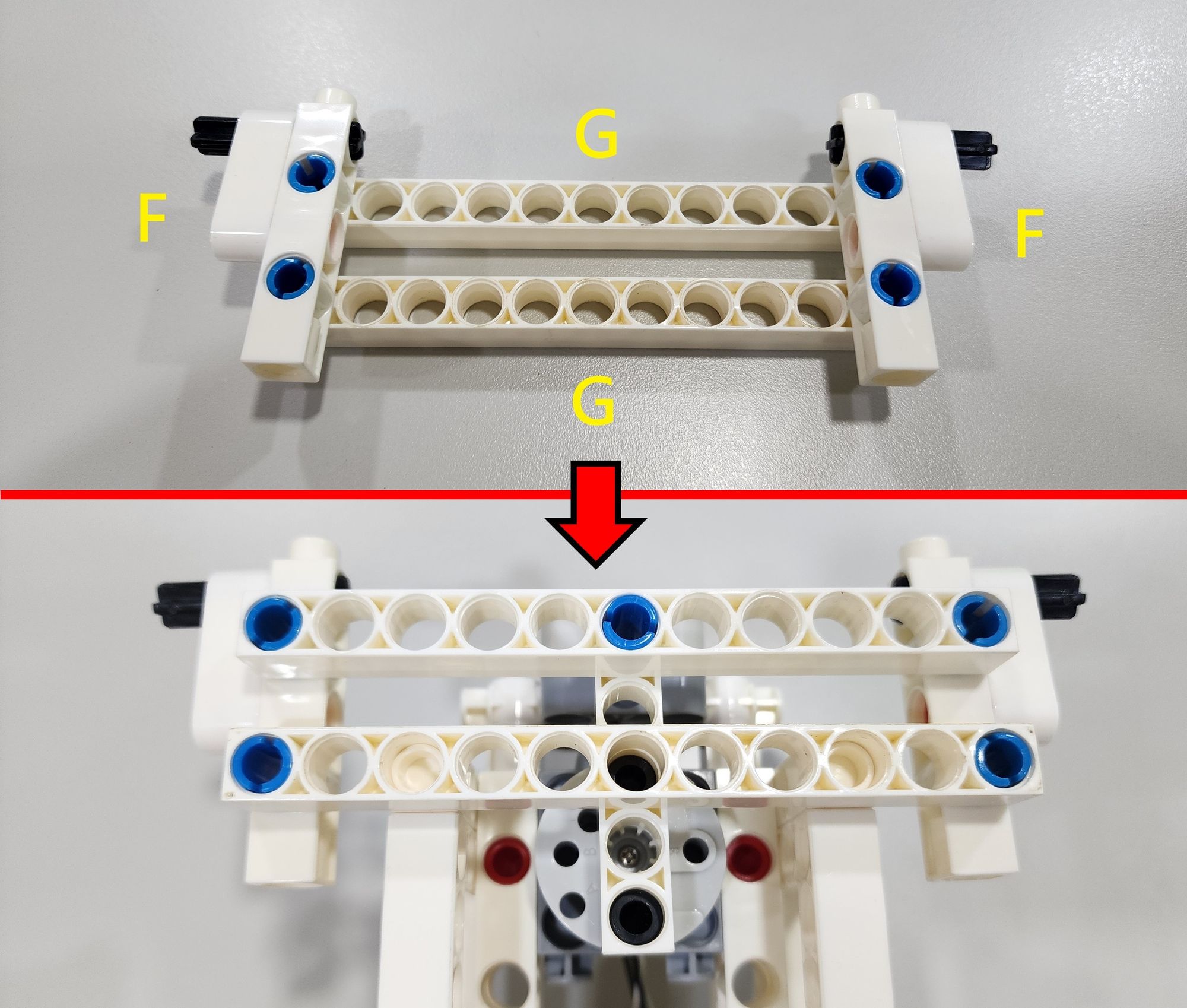
接著依照圖示將部件F以及部件G組裝成平行連桿,並將它與車身以及180度角度伺服馬達結合(圖十九),完成轉向機構的製作。
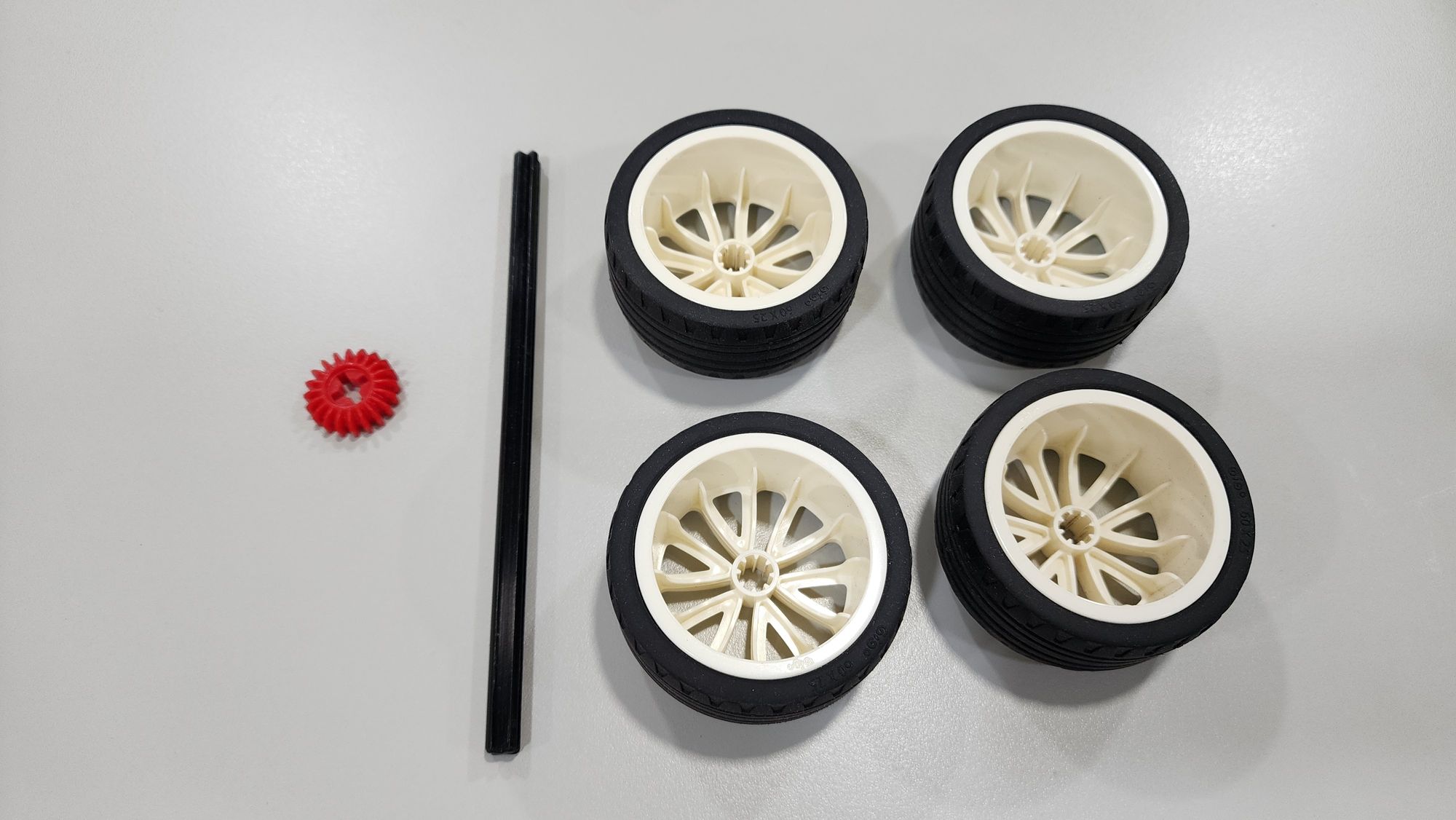
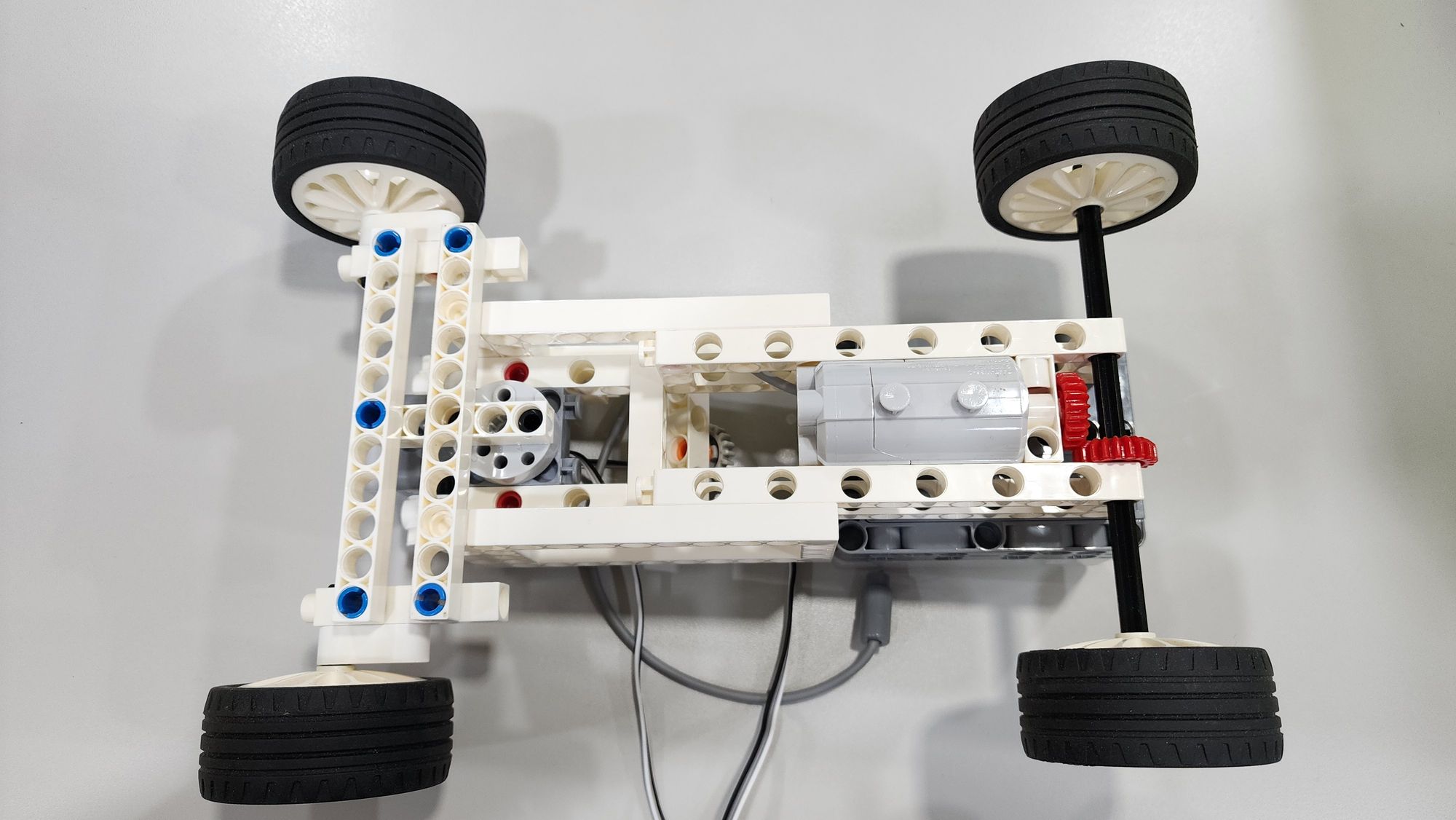
第八步我們要來安裝輪胎,需要使用到20T齒輪、150mmⅠ軸、OD60x25mm塑膠輪框(7407-W10-B1W)以及OD60x25mm橡膠輪胎(7407-W10-A1D)(圖二十),將它們依照圖示安裝在車身前後,完成輪胎的安裝(圖二一)。
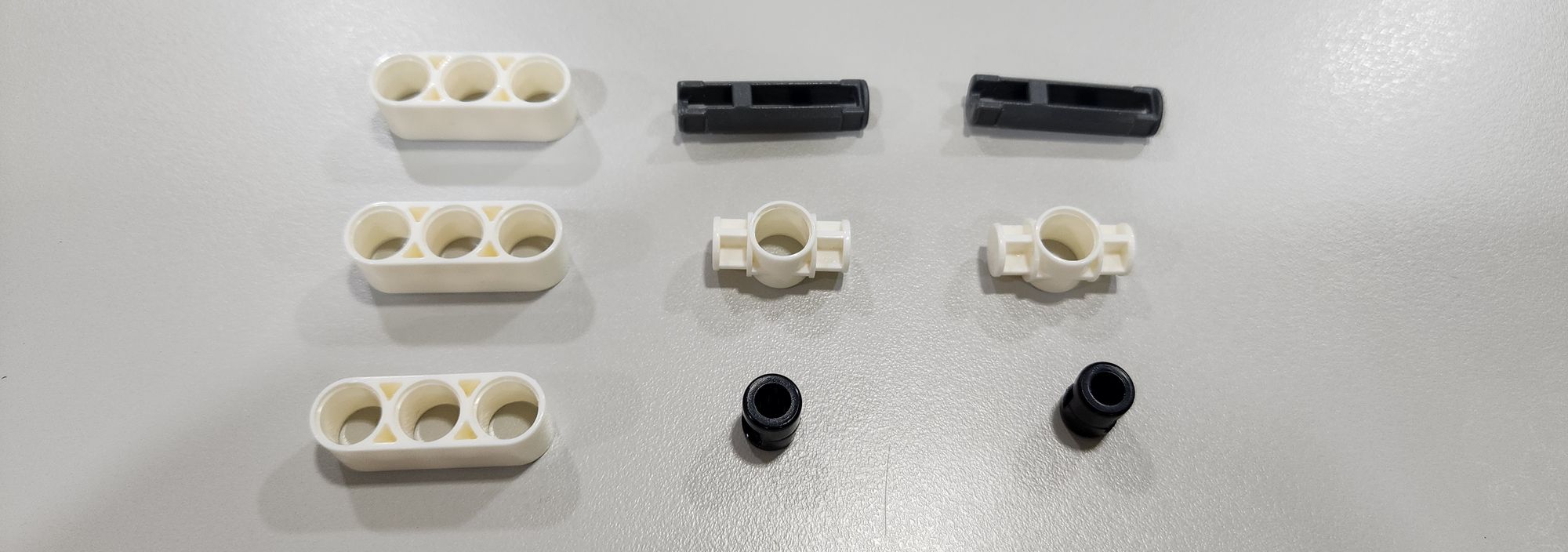
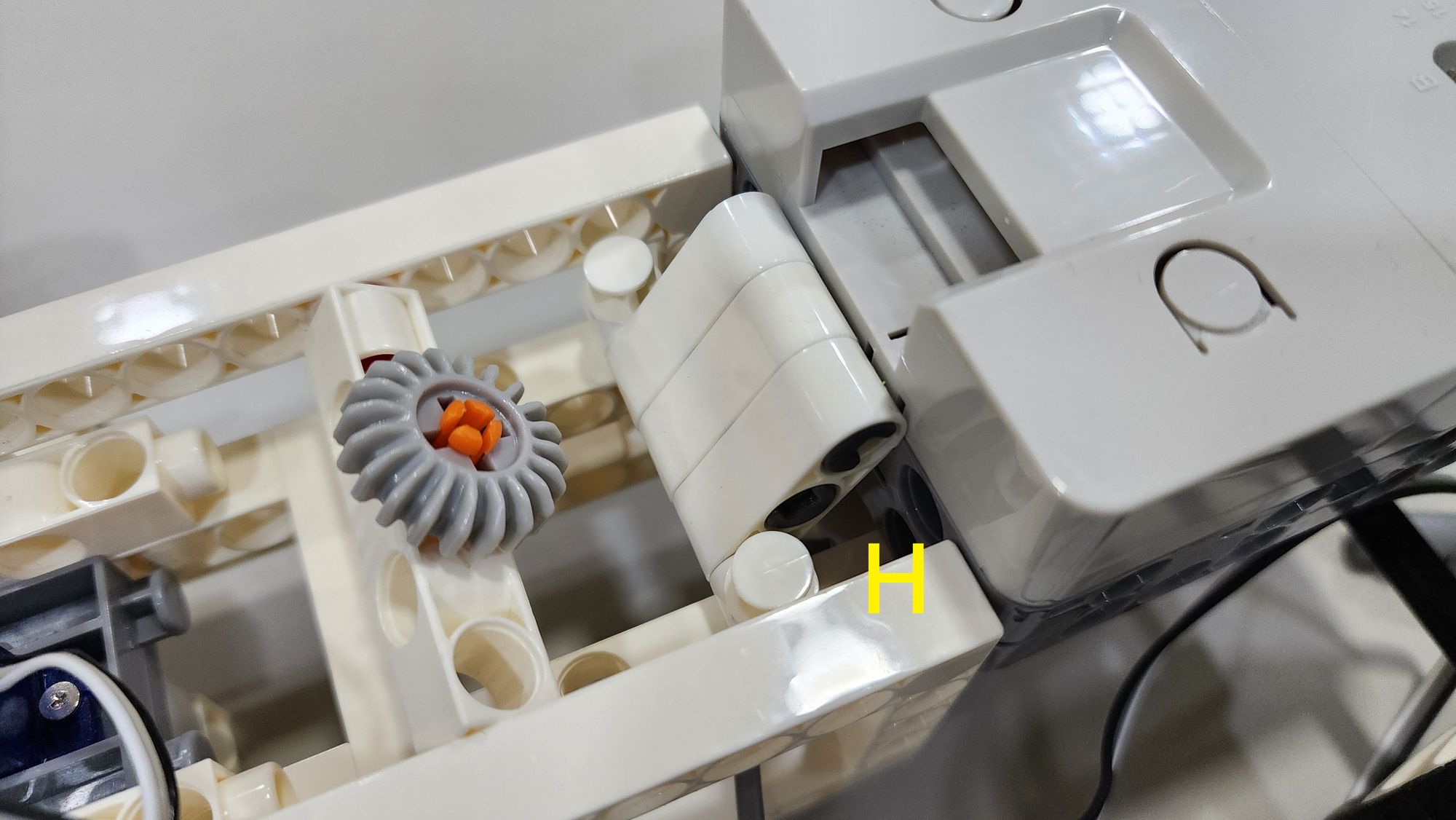
第九步我們要來製作座椅,需要使用到3孔圓角長條、30mm 栓釘鍵、2凸單孔轉向結合器以及短結合鍵(圖二二),依照圖示將它們組裝成部件H(圖二三)。

接著依照圖示將部件H安裝在車身上,完成座椅的製作(圖二四)。
第十步我們要來製作擋風玻璃,需要使用到J型飾片以及二合一結合鍵(圖二五),依照圖示將它們安裝在車身上(圖二六)。


第十一步我們要將各個電子零件安裝在micro:bit 智能主控盒上,將50倍行星齒輪馬達盒的接頭安裝在腳位A;180度角度伺服馬達的杜邦接頭安裝在腳位8;多色LED燈座的杜邦接頭安裝在腳位15(圖二七)。

這樣我們就完成遙控賽車的模型囉(圖二八),現在就讓我們一起來進行程式的編寫吧!

◆ 程式編寫
在編寫程式前,要請大家使用手機或平板下載V7RC這款應用程式(圖二九),安卓手機可在Play商店進行下載;蘋果手機則是在App Store進行下載。
V7RC能夠透過藍牙與Micro:bit連線,將你的手機或平板變成簡易的遙控器,因此在使用前需確保手機或平板的藍牙功能保持開啟,前置作業操作流程如下:
步驟1 開啟手機或平板的藍牙功能。
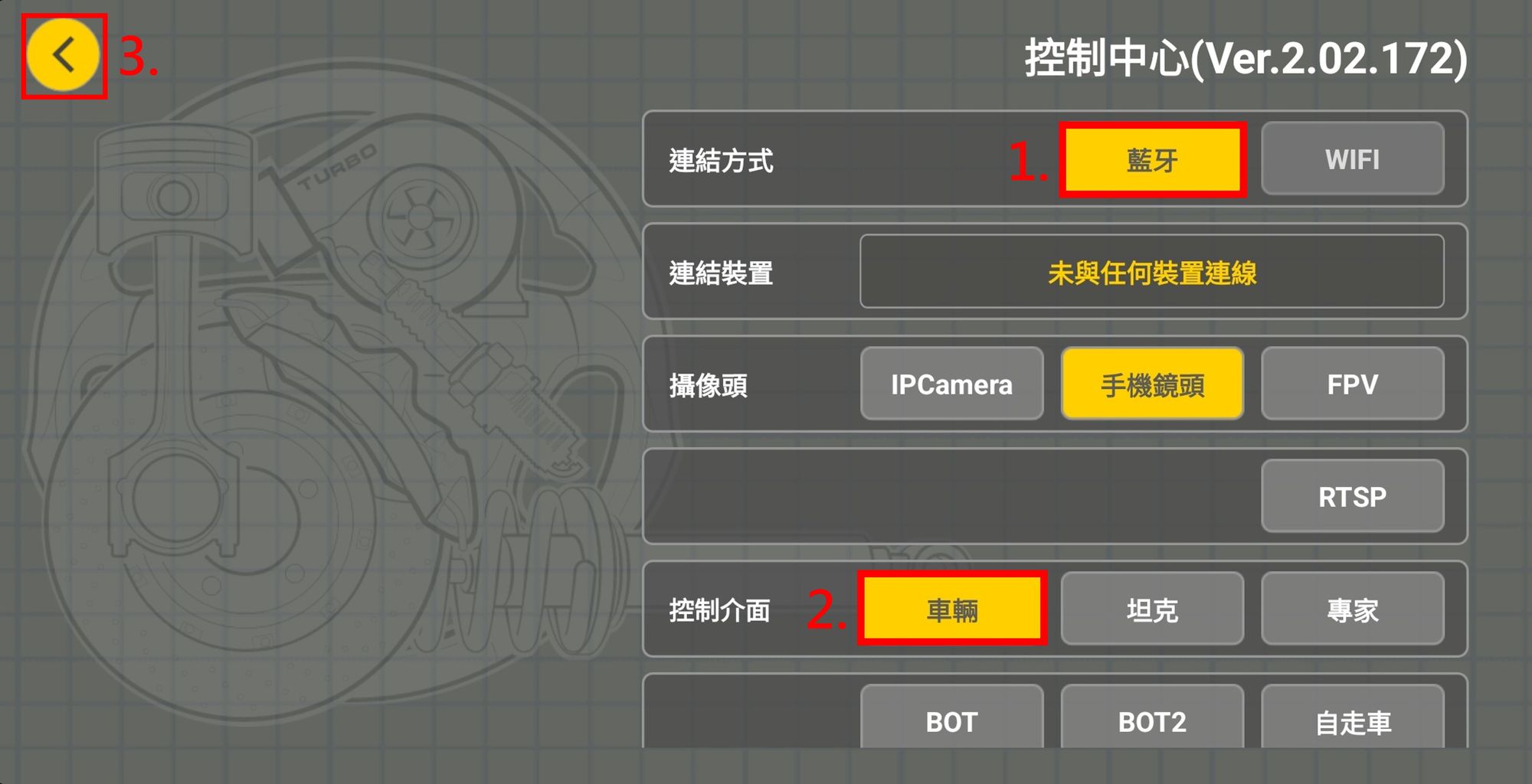
步驟2 點擊左上角的齒輪圖示進入設定頁面(圖三十)。

步驟3 將連線方式設定為藍牙、控制介面設定為車輛,完成後點擊返回圖示回到搖桿介面(圖三一)。
在車輛的控制介面下,左側搖桿能夠上下滑動;右側搖桿則能夠左右滑動(影片一),就像是真的遙控器一樣,並透過向量系統來定義搖桿所在的位置(圖三二)。
左側的垂直搖桿為2軸(如同座標系統的Y軸),當搖桿位於正中間時,2軸向量為1500,若將游標向上推動會增加2軸的向量,最高為2000;游標向下推動則會減少2軸的向量,最低為1000,即2軸向量會在1000~2000之間變化。
右側的水平搖桿也是相同的概念,定義為1軸(如同座標系統的X軸),當搖桿位於正中間時,1軸向量為1500,若將游標向右推動會增加1軸的向量,最高為2000;游標向左推動則會減少1軸的向量,最低為1000,即1軸向量也會在1000~2000之間變化。

透過上述的方式,便能夠依照搖桿的位置來編寫程式,可以點擊下列的雲端資料夾,將「遙控賽車範例程式」的檔案下載至電腦,並透過micro:bit程式編輯網頁來匯入遙控賽車的範例程式。

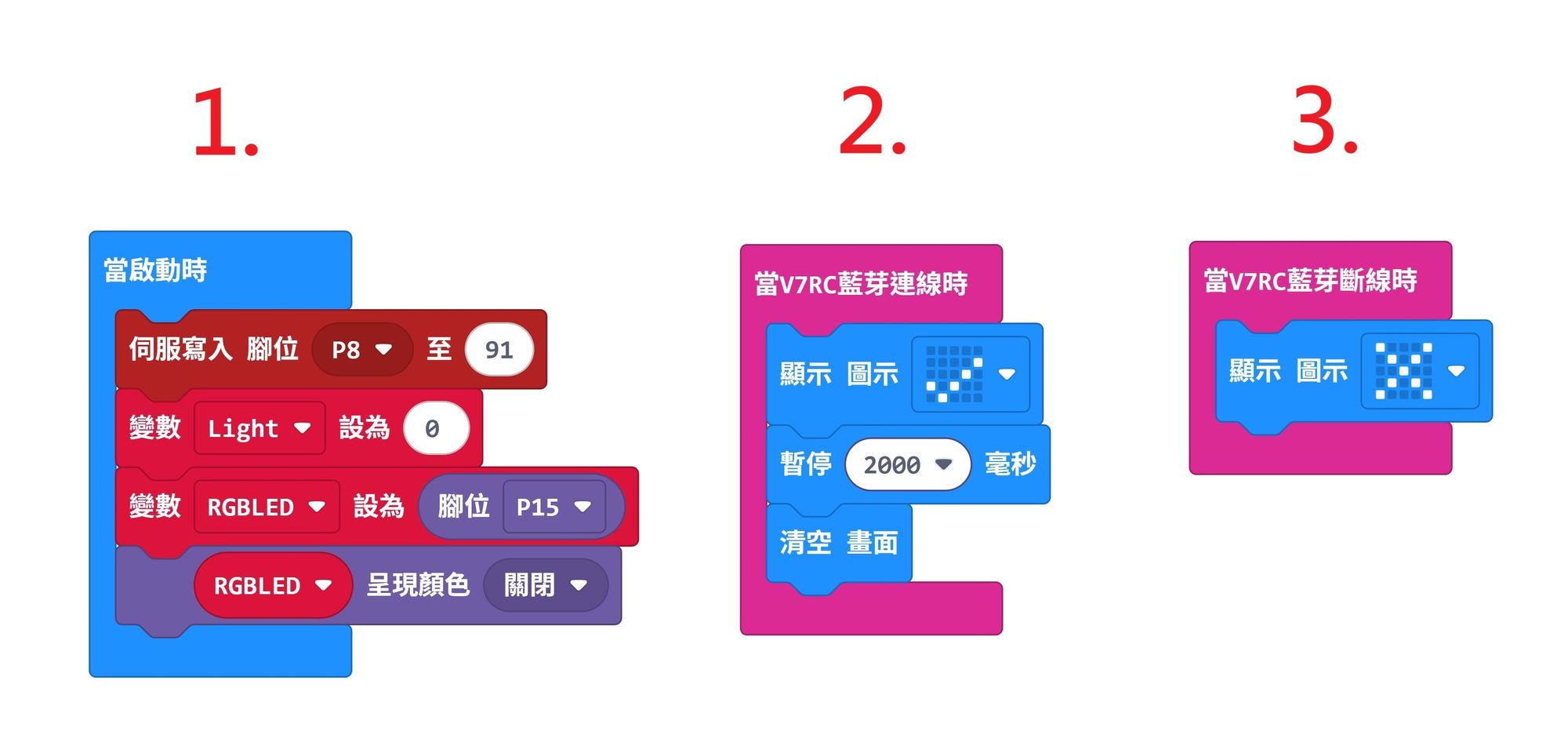
當我們成功匯入後,便能夠看到下面幾段程式方塊(圖三三、三四、三五),相關的程式說明如下:
1. ◆180度角度伺服馬達用於控制遙控賽車的前輪方向,在啟動時需確保前輪方向完全垂直,才能讓賽車成功直走不偏移(理想的垂直角度為90度,但因每款180度角度伺服馬達皆有些許誤差,以本模型為例,需要調整至91度才能達到完全垂直,故需要針對自己的模型狀況進行微調)。
◆將控制多色LED燈座的變數設為0。
◆將多色LED燈座關閉。
2. 當手機以藍牙方式與Micro:bit連接時,顯示「打勾」符號。
3. 當手機與Micro:bit中斷連接時,顯示「打叉」符號。
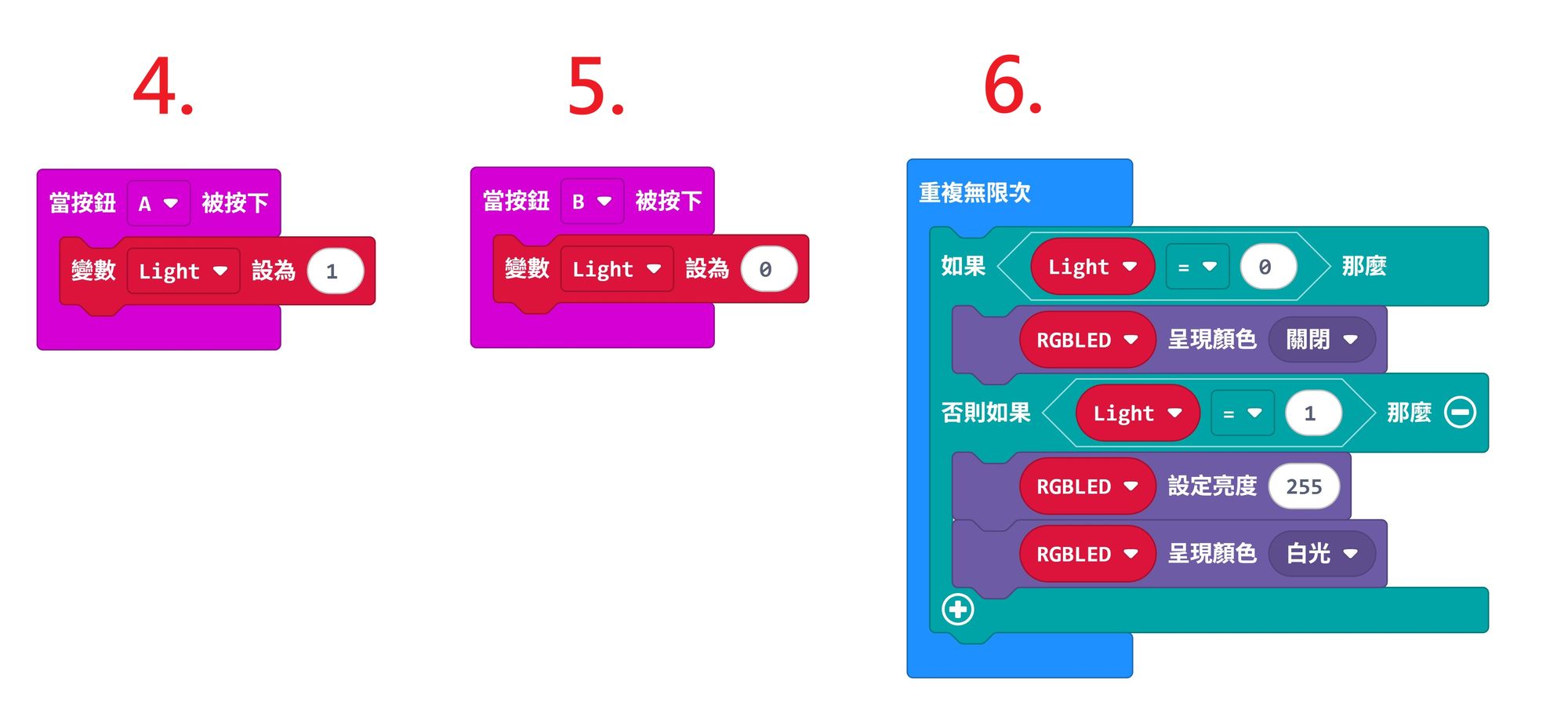
4. ◆當按下A紐時,將變數Light設為1。
5. ◆當按下B紐時,將變數Light設為0。
6. ◆當變數Light為1時,點亮多色LED燈座;當變數Light為0時,關閉多色LED燈座。
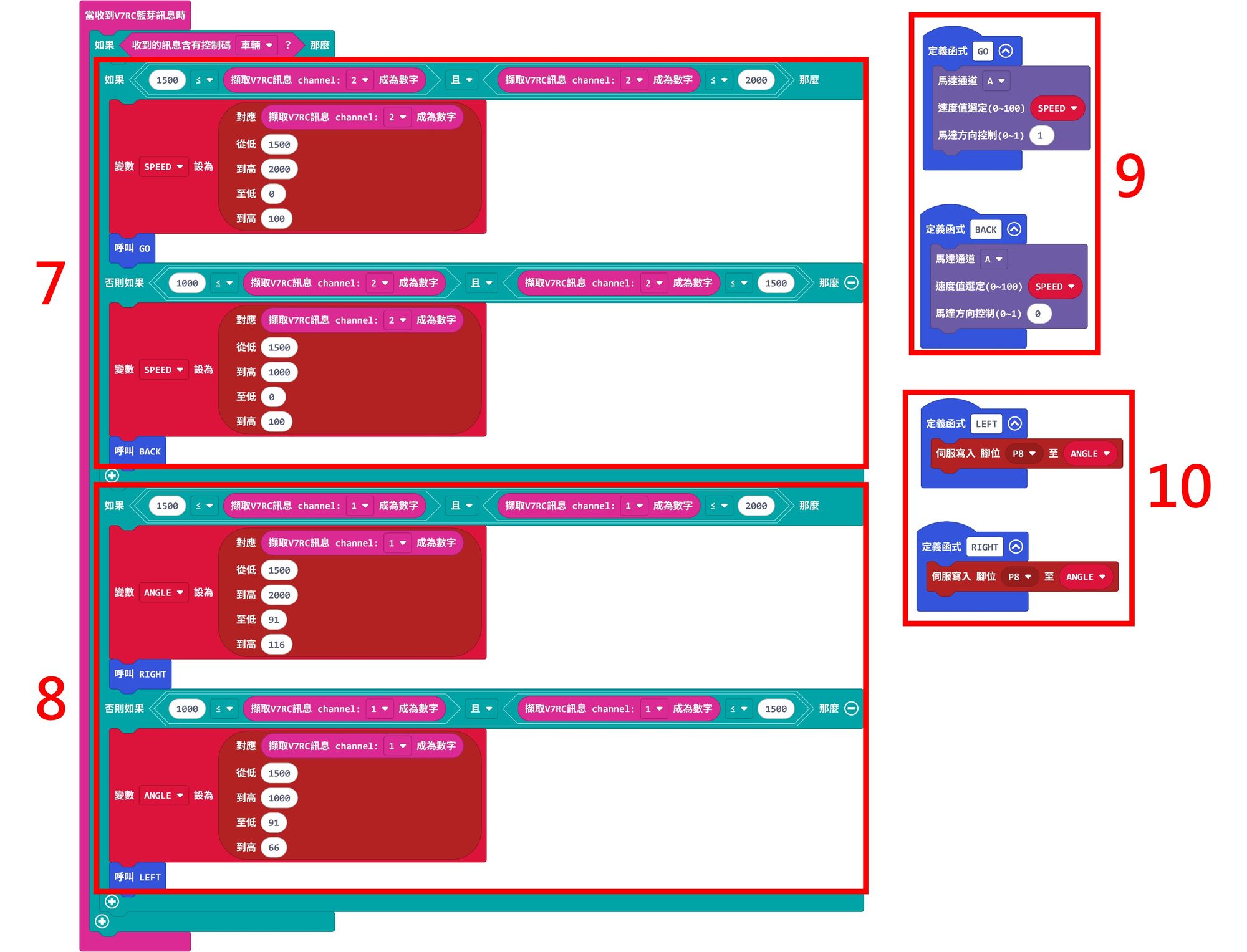
7. ◆當左側搖桿向上推動時(2軸向量介於1500~2000),將變數SPEED量化為2軸的向量(2軸向量每增加5,變數SPEED便增加1,這樣便能夠透過左側搖桿來控制賽車的前進速度,即左側搖桿向上推動越多,賽車前進的速度越快),並呼叫函式GO。
◆當左側搖桿向下推動時(2軸向量介於1000~1500),將變數SPEED量化為2軸的向量(2軸向量每減少5,變數SPEED便增加1,透過左側搖桿來控制賽車的後退速度,即左側搖桿向下推動越多,賽車後退的速度越快),並呼叫函式BACK。
8. ◆當右側搖桿向右推動時(1軸向量介於1500~2000),將變數ANGLE量化為1軸的向量(1軸向量每增加20,變數ANGLE便增加1,這樣便能夠透過右側搖桿來控制賽車前輪的右轉幅度,即右側搖桿向右推動越多,賽車前輪向右轉動的幅度越大,最多轉動25度),並呼叫函式RIGHT。
◆當左側搖桿向左推動時(1軸向量介於1000~1500),將變數ANGLE量化為1軸的向量(1軸向量每減少20,變數ANGLE便減少1,透過右側搖桿來控制賽車前輪的左轉幅度,即右側搖桿向左推動越多,賽車前輪向左轉動的幅度越大,最多轉動25度),並呼叫函式LEFT。
9. ◆當收到呼叫函式GO的指令時,將變數SPEED的數值帶入馬達,並讓馬達以順時針方向轉動。
◆當收到呼叫函式BACK的指令時,將變數SPEED的數值帶入馬達,並讓馬達以逆時針方向轉動。
10. ◆當收到呼叫函式LEFT的指令時,將變數ANGLE的數值帶入180度角度伺服馬達。
◆當收到呼叫函式RIGHT的指令時,將變數ANGLE的數值帶入180度角度伺服馬達。
◆ 模型操作
現在就讓我們來操作遙控賽車吧!首先要將手機與Micro:bit進行連線,相關操作流程如下:
步驟1 開啟主控盒的電源。
步驟2 開啟手機或平板的藍牙功能並打開V7RC應用程式。
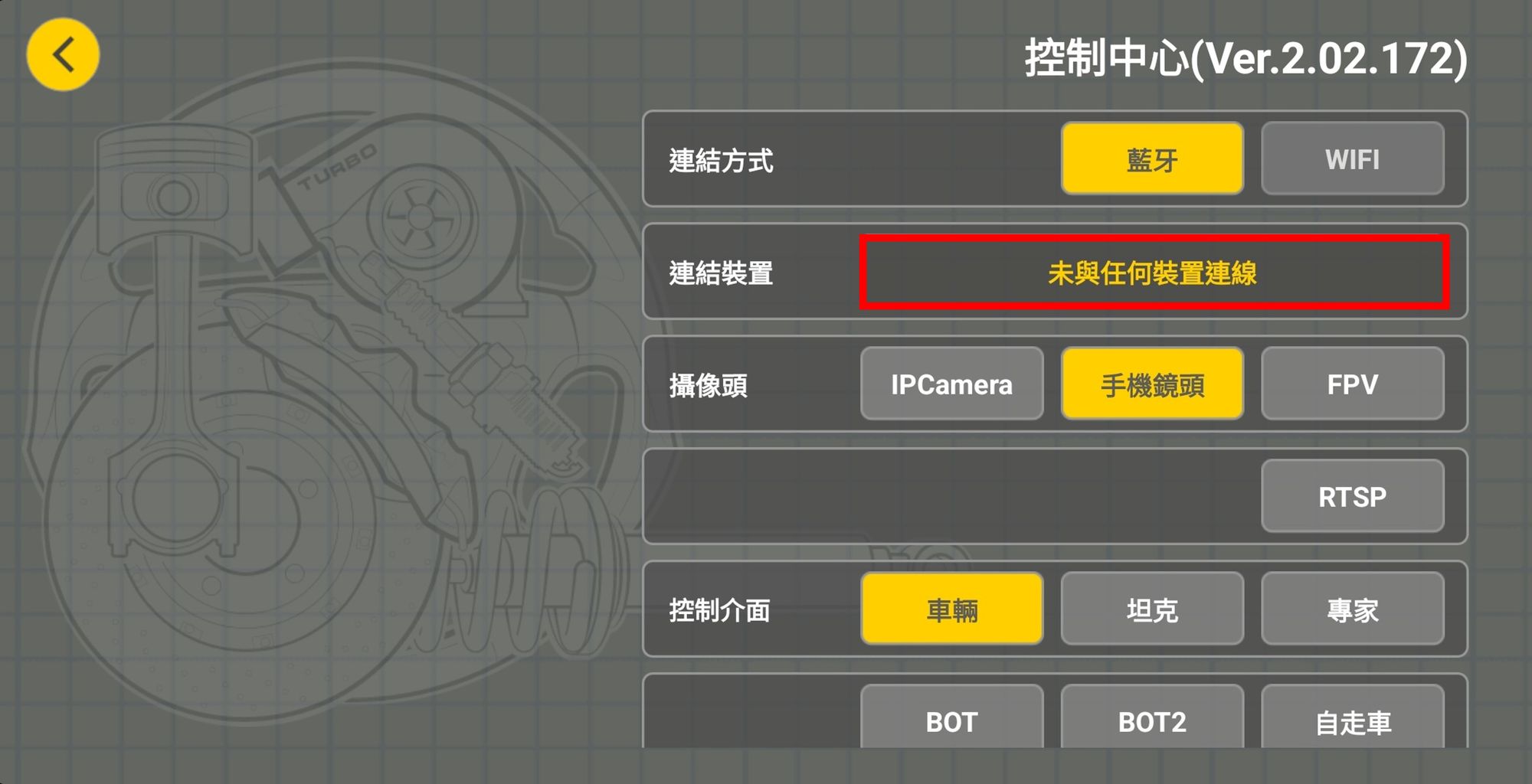
步驟3 點擊左上角的齒輪圖示進入設定頁面(圖三六)。
步驟4 點選連接裝置欄位(圖三七)。
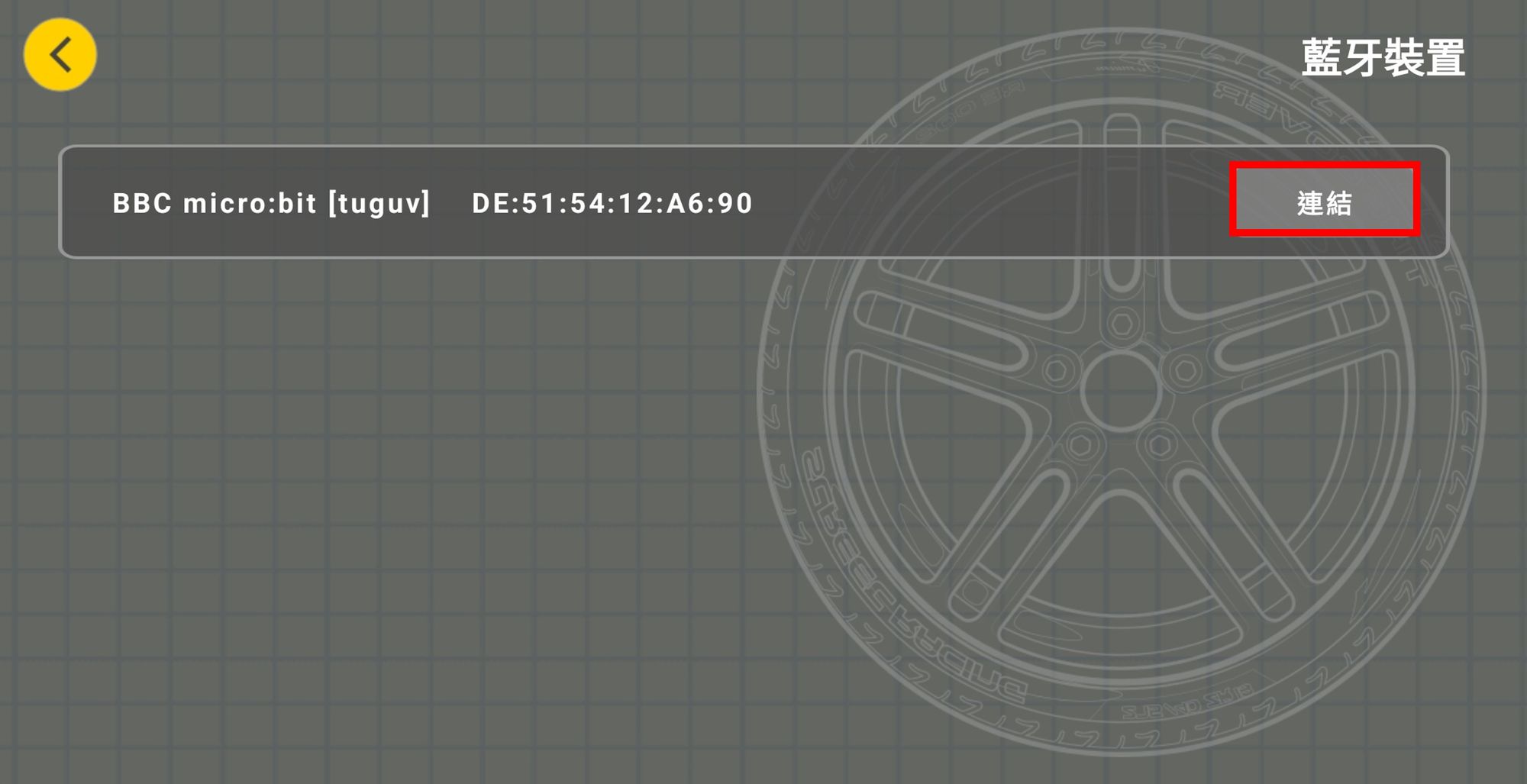
步驟5 找到欲配對的Micro:bit並點選連結(圖三八)。
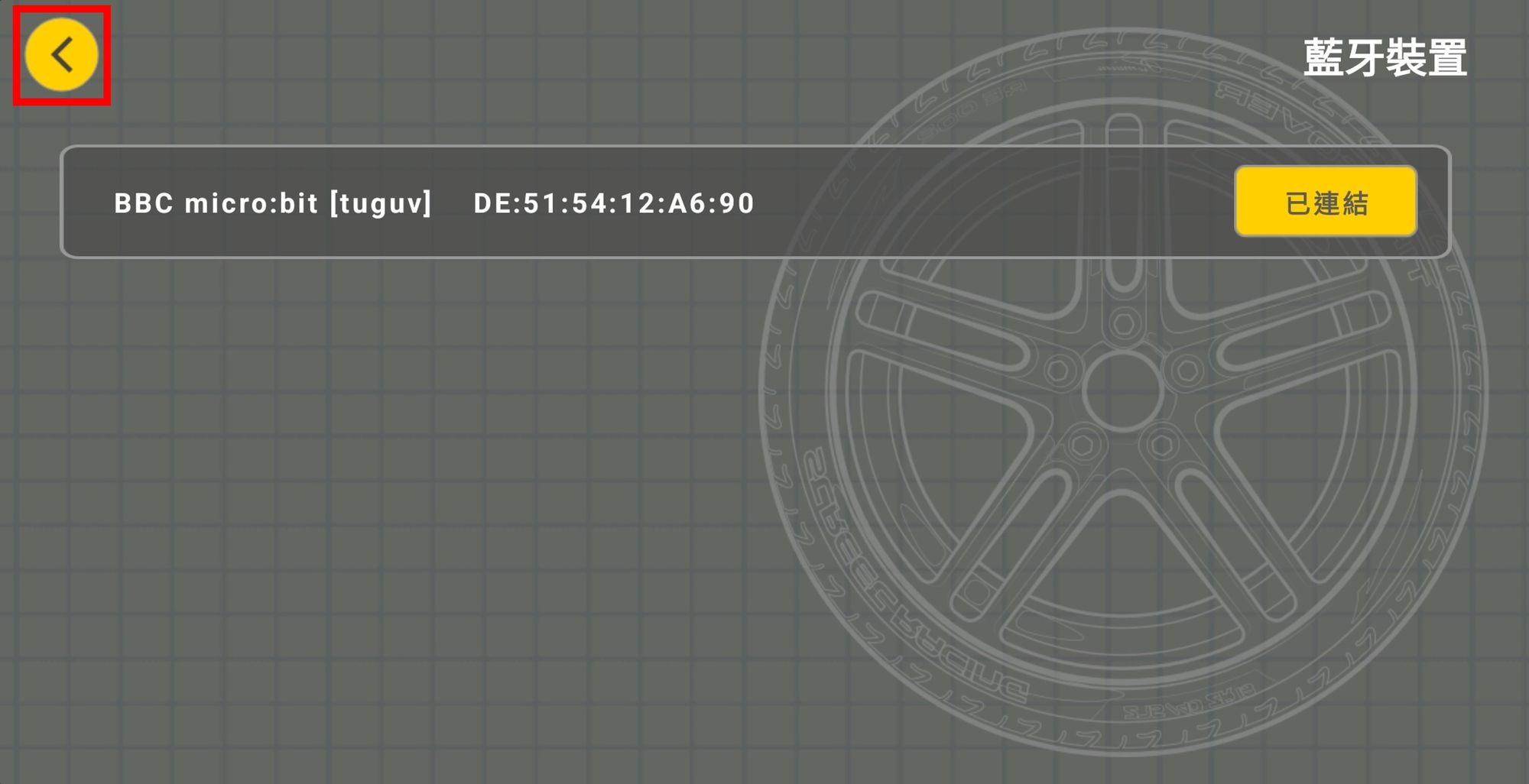
步驟6 完成與Micro:bit的連線後,點擊返回圖示回到搖桿介面。(圖三九、四十)

現在我們就可以直接使用手機或平板來遙控模型囉,如同程式所設計的,左側搖桿能夠控制賽車的速度與移動方向(影片二);而右側搖桿能夠控制賽車左右轉的幅度(影片三),在操縱時就像是真的遙控車一樣呢(影片四)!
◆結語
這次所製作的遙控賽車結合了外部的應用程式,將手機變成了Micro:bit的遙控器,跳脫了以往只能使用感測器啟動馬達、角度伺服以及LED燈的限制。你也可以試著將模型改造成其他的遙控機械,如遙控機器人、遙控發球機、遙控仿生獸...等。
一起來發揮創意吧!
今天的分享就到這邊,喜歡這篇文章的話記得幫浣熊老師大力分享出去,我們下次見囉,拜拜!
◆科學原理:
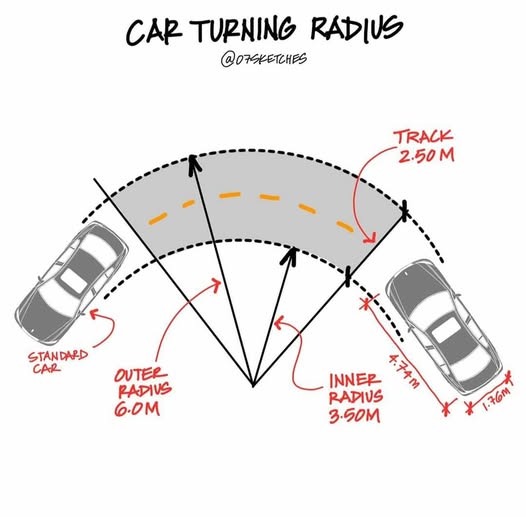
遙控賽車的前輪使用到平行連桿的結構,平行連桿由多個連桿以及可活動的轉軸組成,透過兩對連桿始終保持平行的特性(影片五),讓前方的兩顆輪胎都能保持相同的角度,此外兩顆前輪能夠各自以不同的速度旋轉,能夠避免賽車轉彎時產生內輪差,即車輛在轉彎時,內側車輪比外側車輪走的路程短、轉速必須較慢的物理現象(圖四一)。
◆課綱參考:
科-S-U-A3 具備統整科技資源進行規劃、執行、評鑑與反省的能力,並能以科技創新的態度與作為,因應新的情境與問題。
生 k-V-1 能了解工程與設計的基本知識,如:工程設計流程、動力機構、 結構設計、工程材料、機電控制等。
生 A-V-1 機構與結構的設計與應用。
◆參考資料:
 維基媒體專案貢獻者維基媒體專案貢獻者
維基媒體專案貢獻者維基媒體專案貢獻者
Please sign in to vote.