生活中的科學EP13-仿生自走獸

大家好我是浣熊老師,不知道各位有沒有聽過仿生獸呢?仿生獸(STRANDBEEST)是一種受到生物學特性啟發的機器人或機械裝置,透過機械裝置模擬出生物的構造或移動方式,如:四足動物、昆蟲、鳥類或其他生物的機械模型,最有名的莫過於荷蘭藝術家-Theo Jansen設計的風力仿生獸(影片一),使用風力做為動力,模擬生物的移動方式。
今天浣熊老師也要來帶大家製作出一個簡易的仿生獸,它是以重力做為動力的,又被稱為斜坡自走玩具,現在就讓浣熊老師一步步教大家如何製作吧!
◆ 組裝步驟
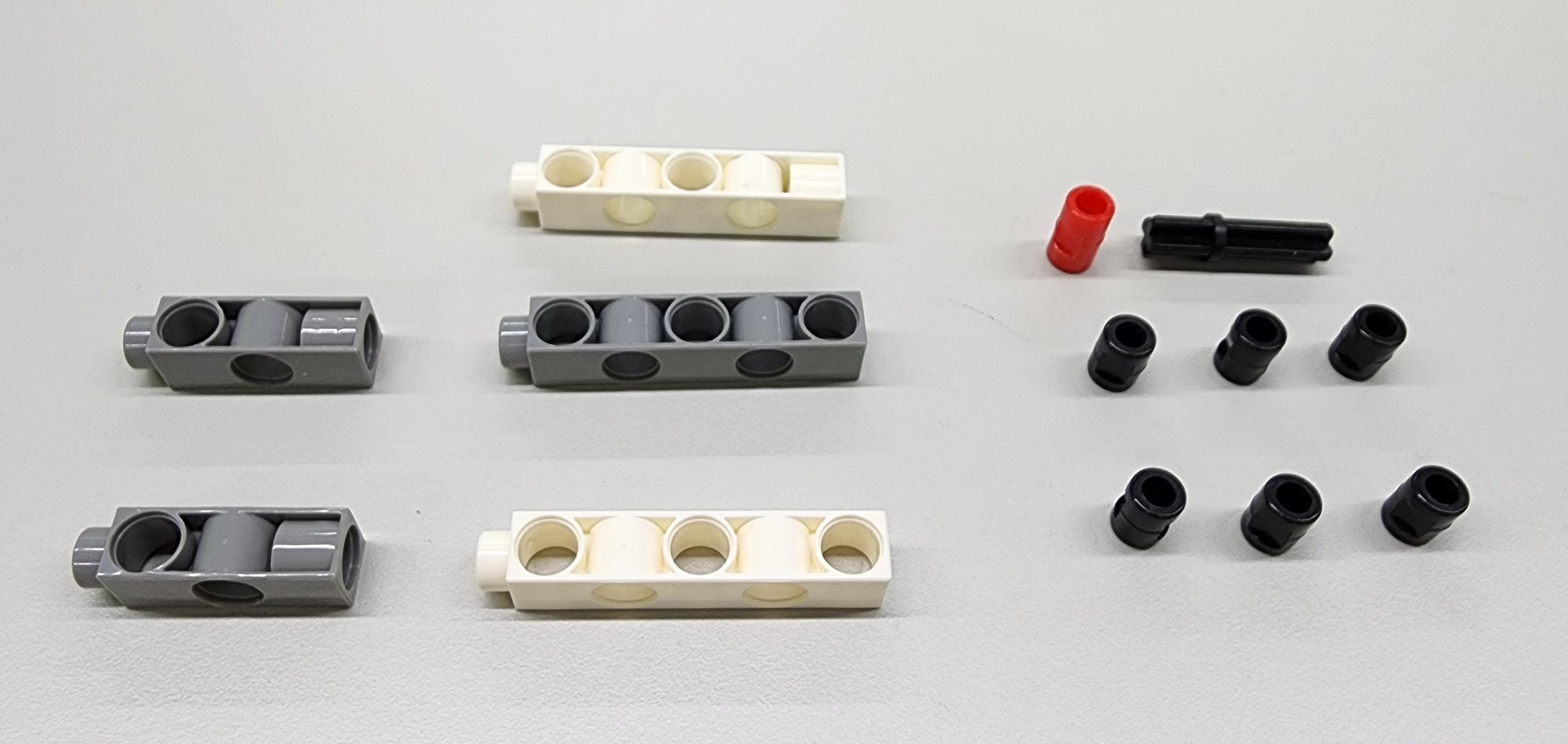
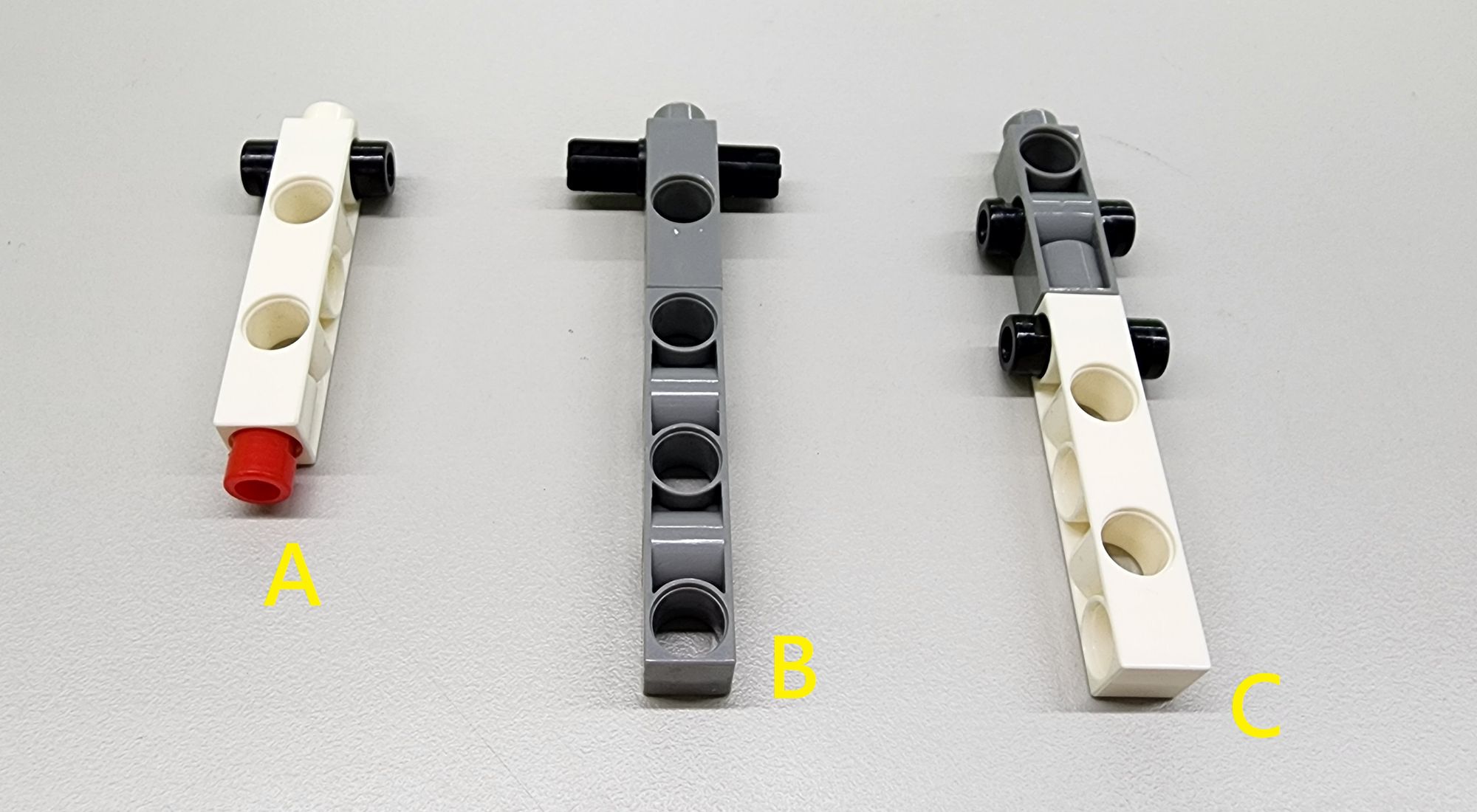
第一步我們需要使用到5孔超長條、5孔超長條底無孔、3孔超長條、30mmⅡ軸、長結合鍵以及短結合鍵(圖一),依照圖示將它們組裝成部件A、部件B與部件C(圖二)。
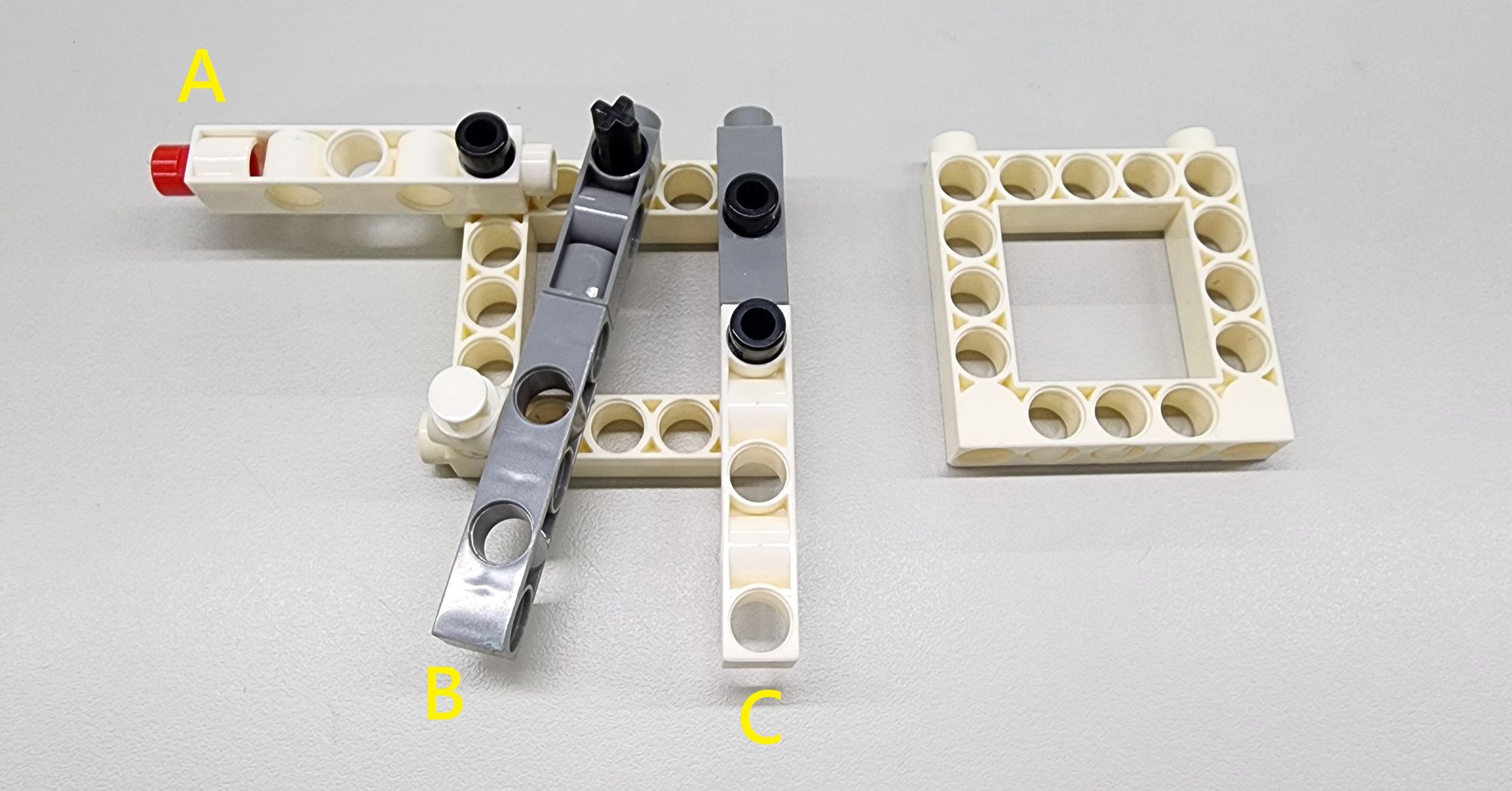
第二步我們要來製做斜坡自走玩具的主體,需要使用到5×5孔正方框以及2凸單孔轉向結合器(圖三)。

首先依照圖示將部件A、部件B、部件C與2凸單孔轉向結合器安裝在5×5孔正方框上方(圖四),接著再壓上另一個5×5孔正方框,完成主體的製作(圖五)。
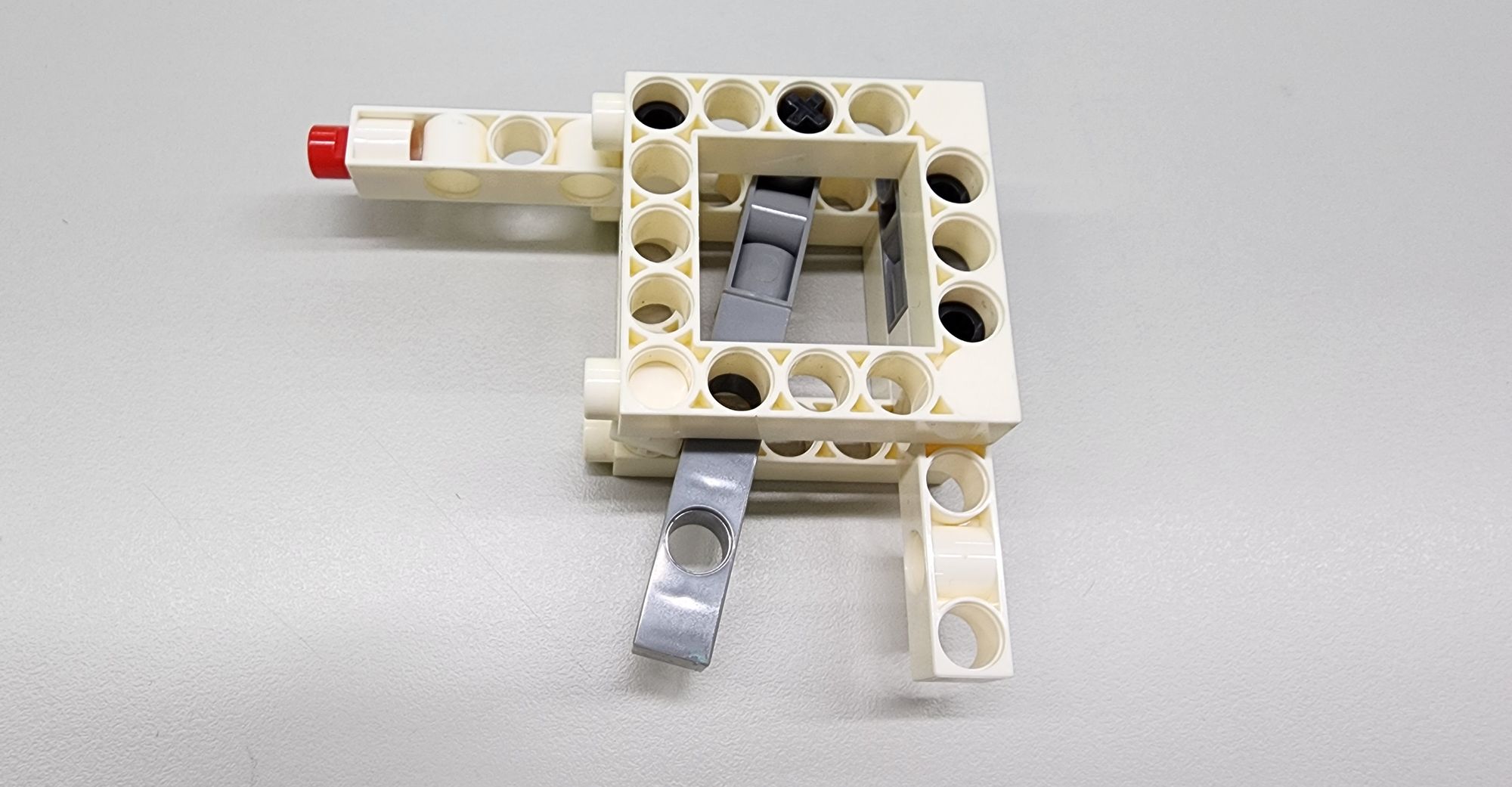
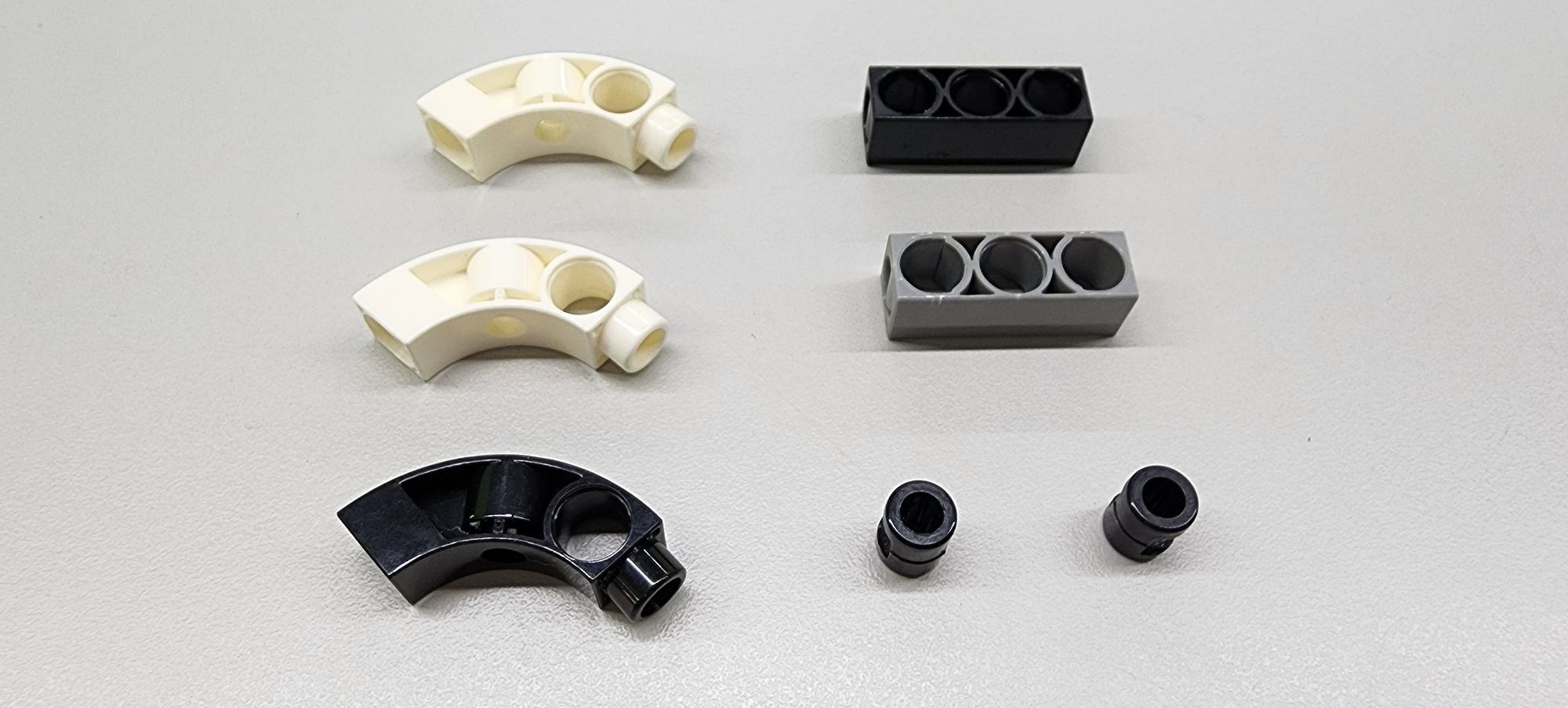
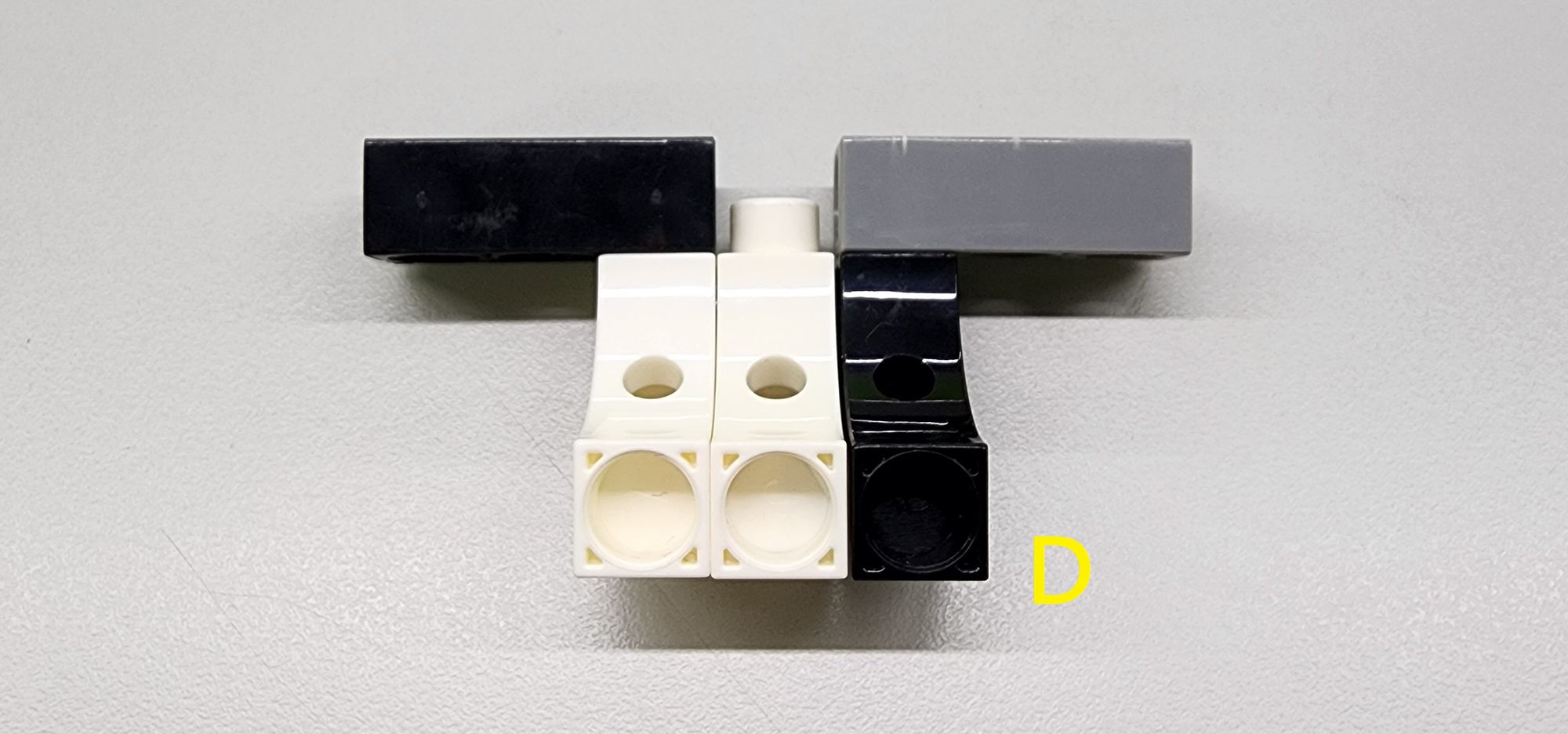
第三步我們要來製做斜坡自走玩具的後腳,需要使用到3孔1/4弧長條、3孔長條以及短結合鍵(圖六),依照圖示將它們組裝成部件D(圖七)。
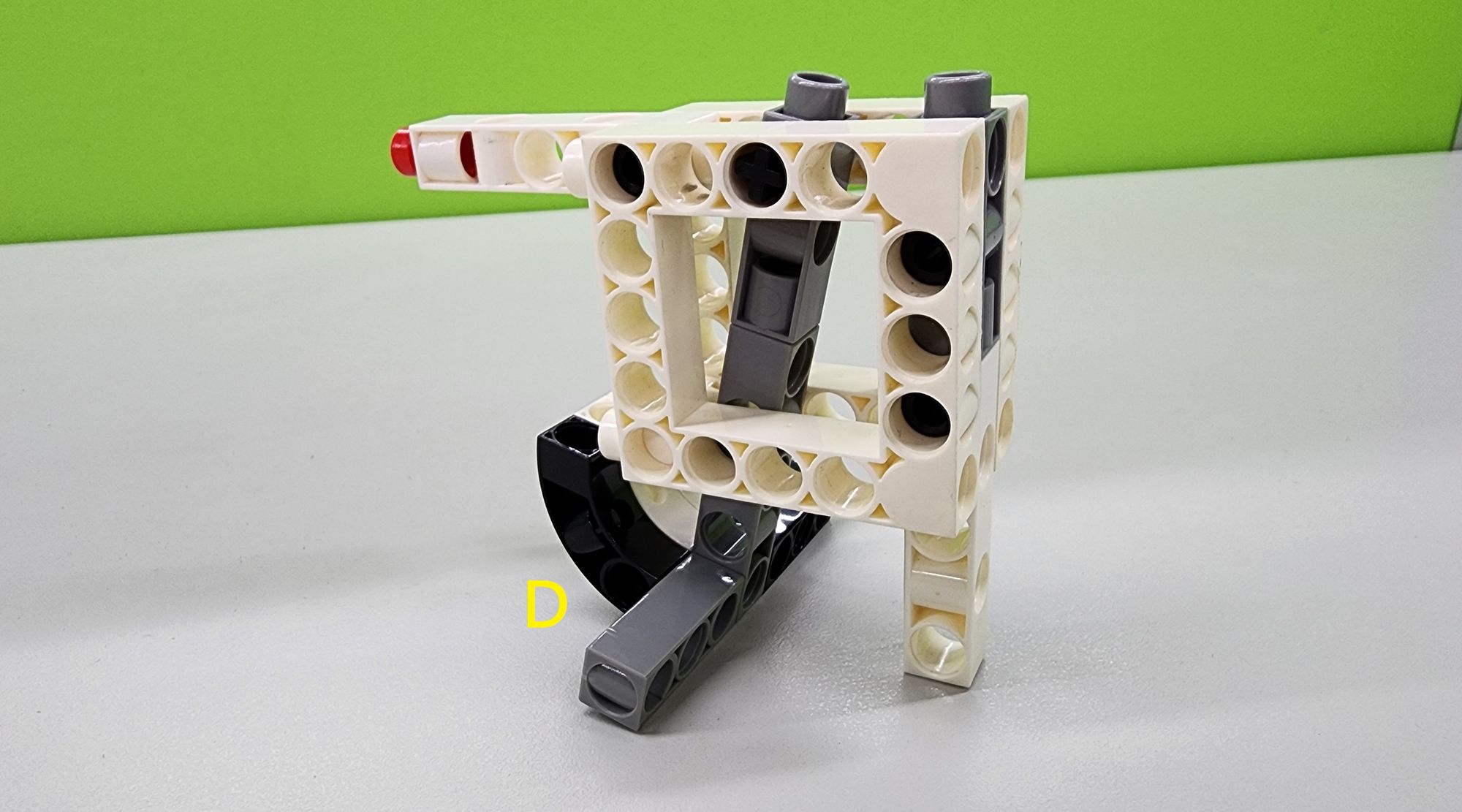
接著依照圖示將部件D安裝在部件B下方,完成後腳的製作(圖八)。
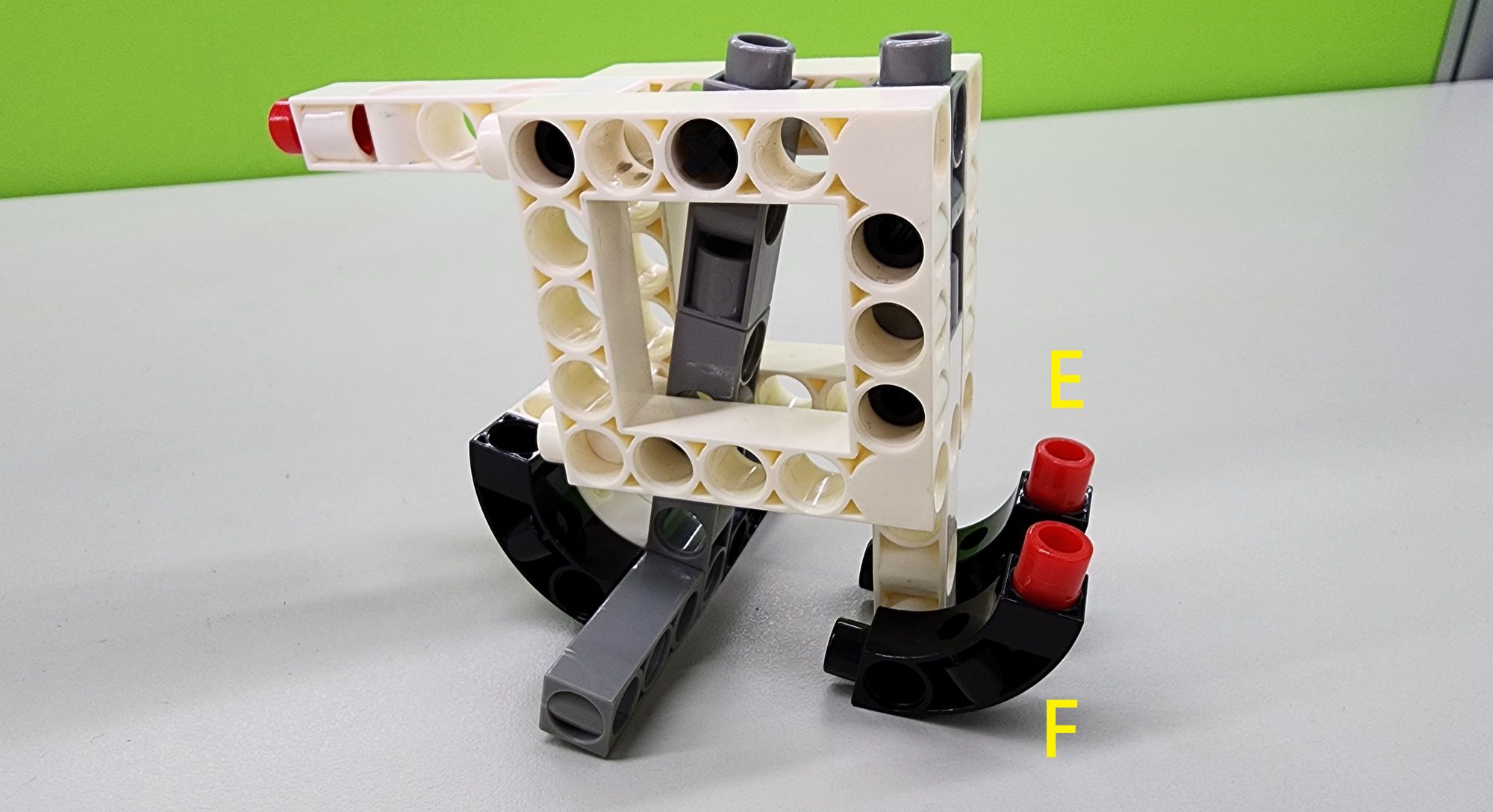
第四步我們要來製做斜坡自走玩具的前腳,需要使用到3孔1/4弧長條、長結合鍵以及短結合鍵(圖九),依照圖示將它們組裝成部件E、部件F(圖十)。


接著依照圖示將部件E和部件F安裝在部件C下方(圖十一)。
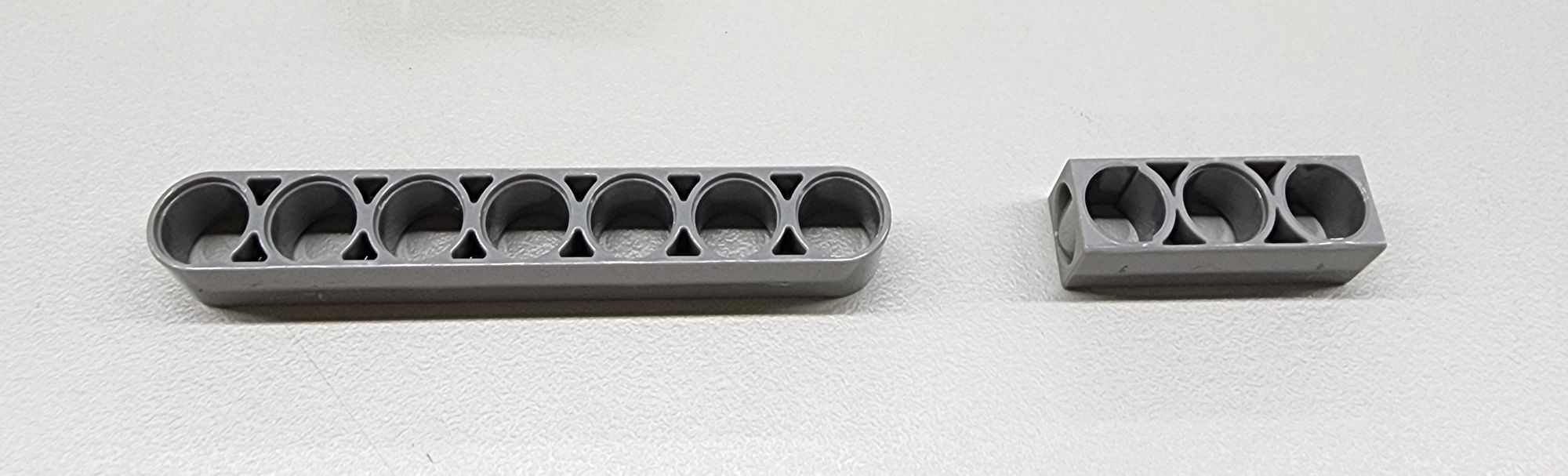
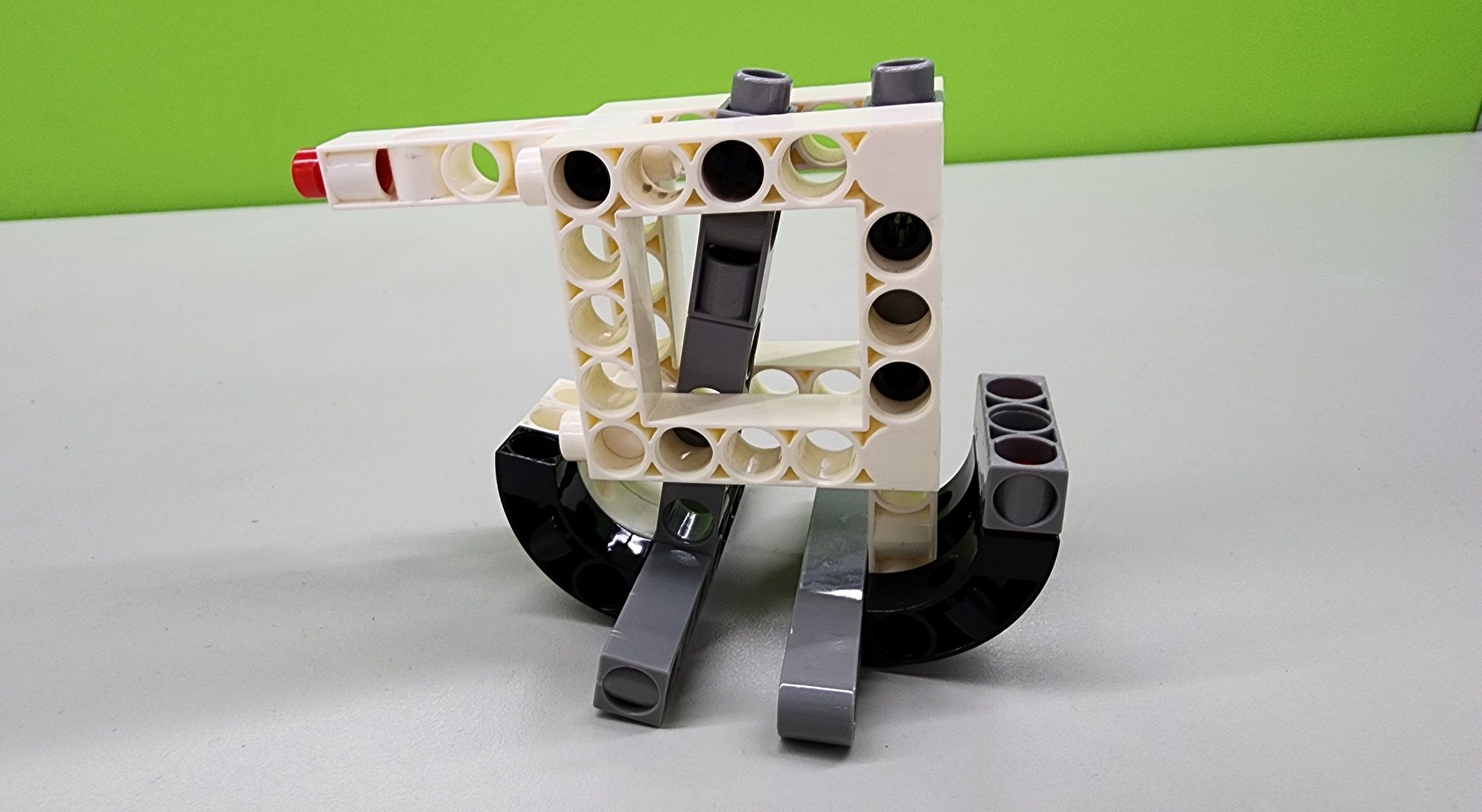
最後需要使用到7孔圓角長條以及3孔長條(圖十二),依照圖示將它們與部件E和部件F結合(圖十三)。
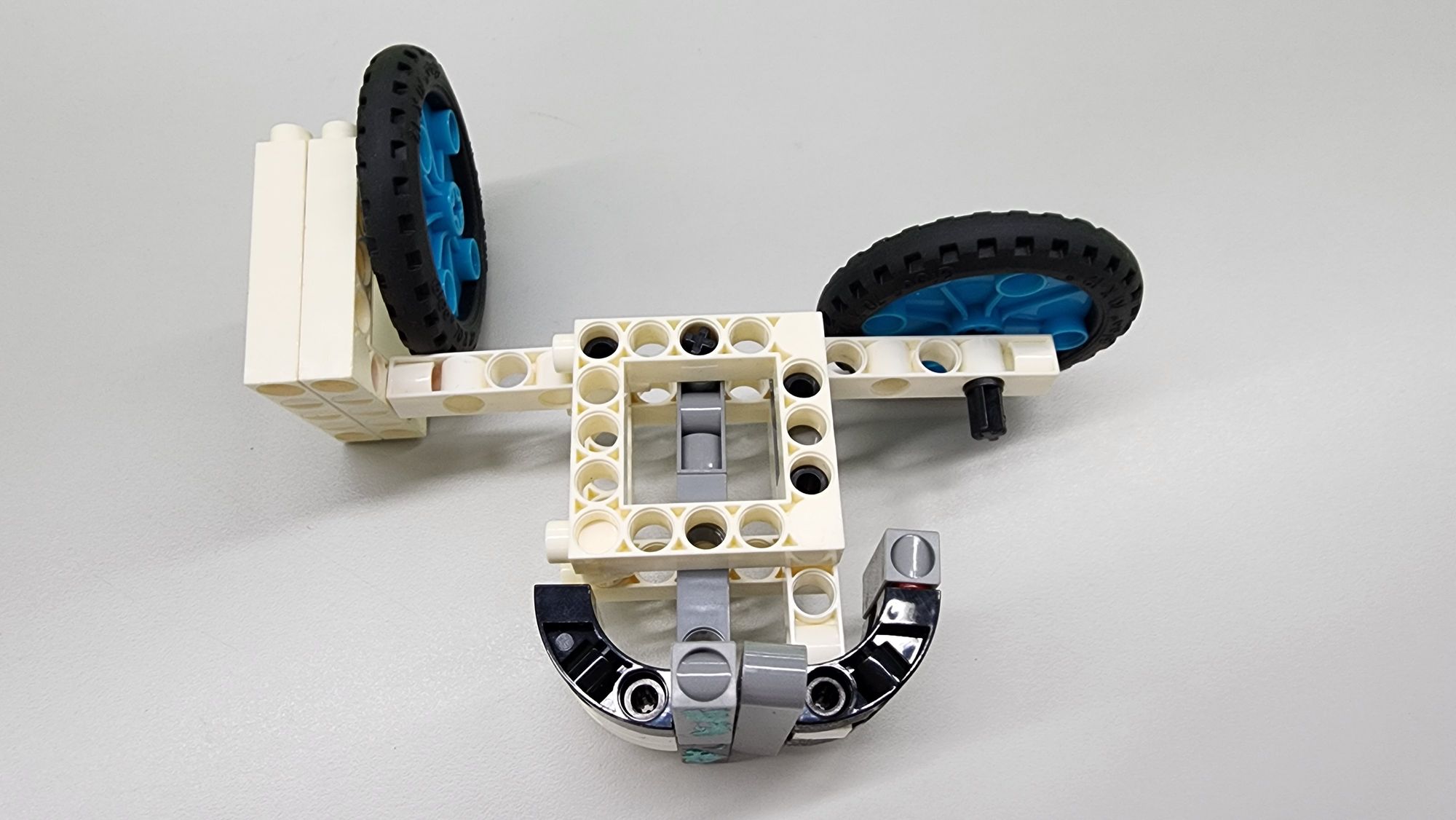
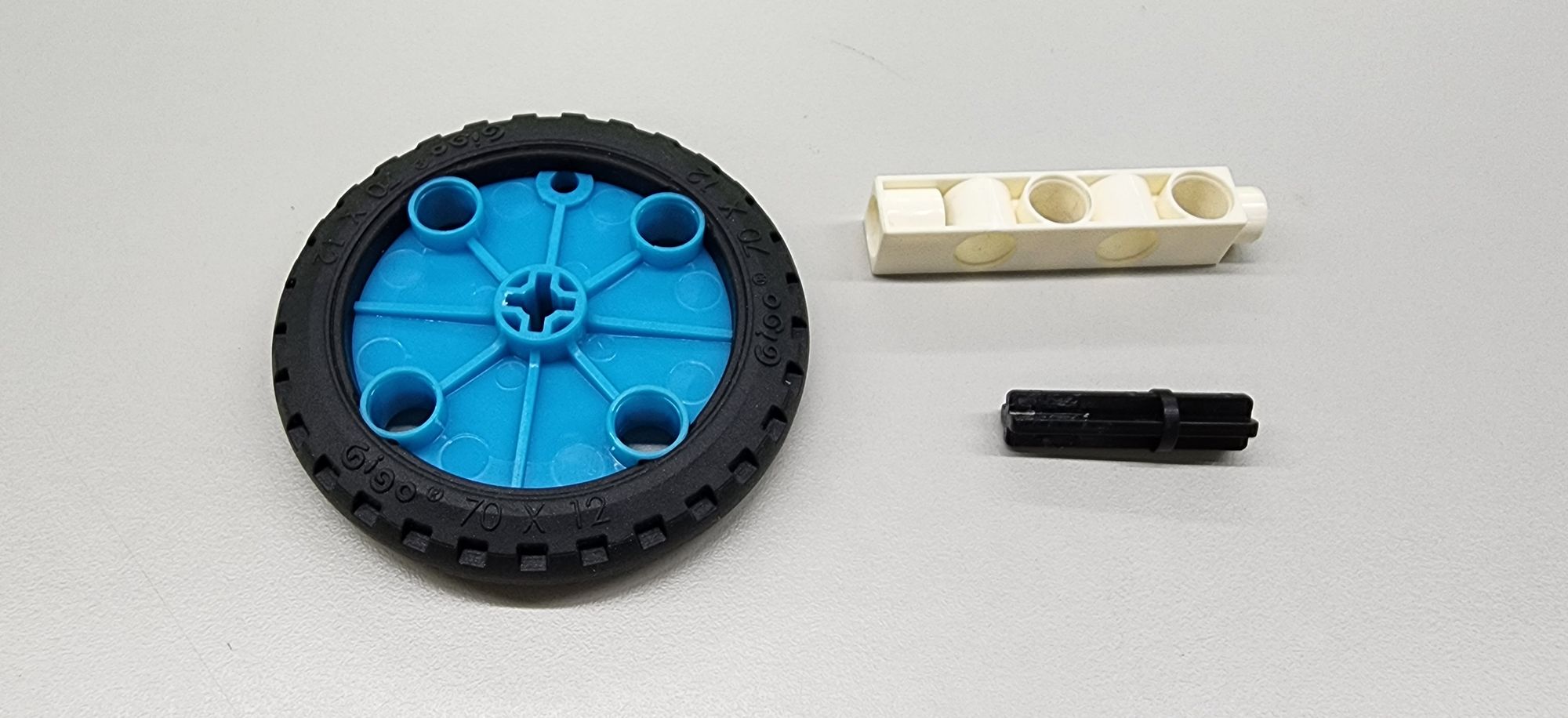
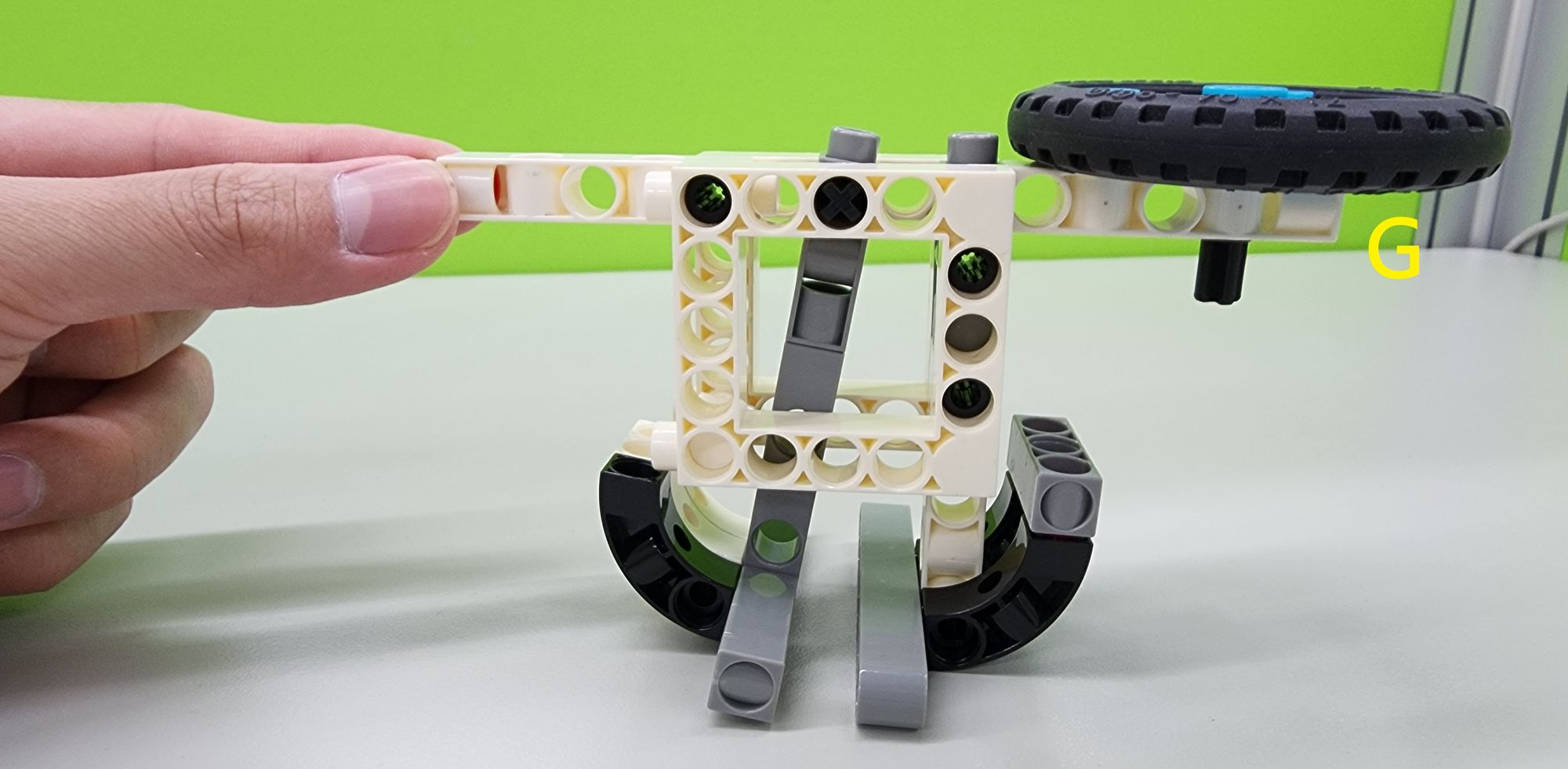
第五步我們要來製做斜坡自走玩具的前方配重,需要使用到70×12mm橡膠輪、5孔超長條以及30mmⅡ軸(圖十四),依照圖示將它們組裝成部件G(圖十五)。

接著依照圖示將部件G安裝在斜坡自走玩具的前方(圖十六)。
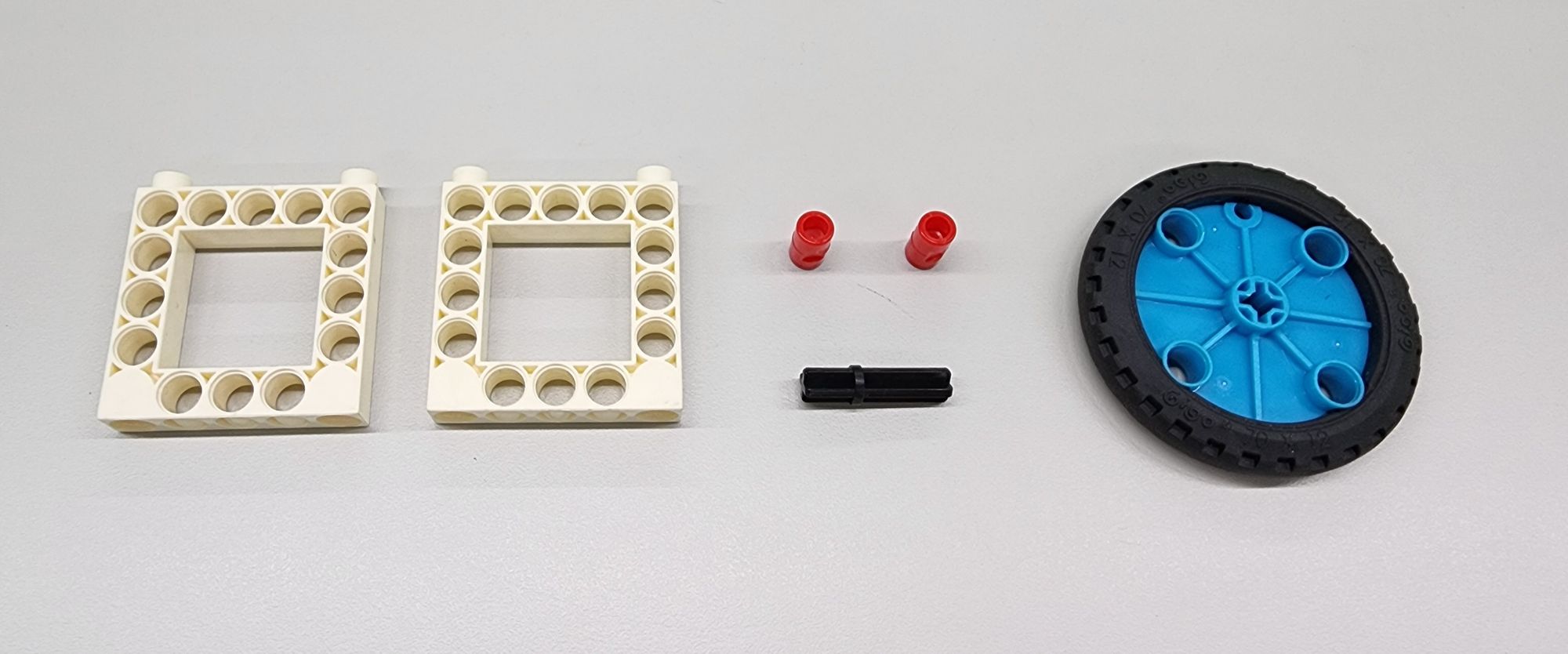
第六步我們要來製做斜坡自走玩具的後方配重,需要使用到70×12mm橡膠輪、5×5孔正方框、長結合鍵以及30mmⅡ軸(圖十七)。
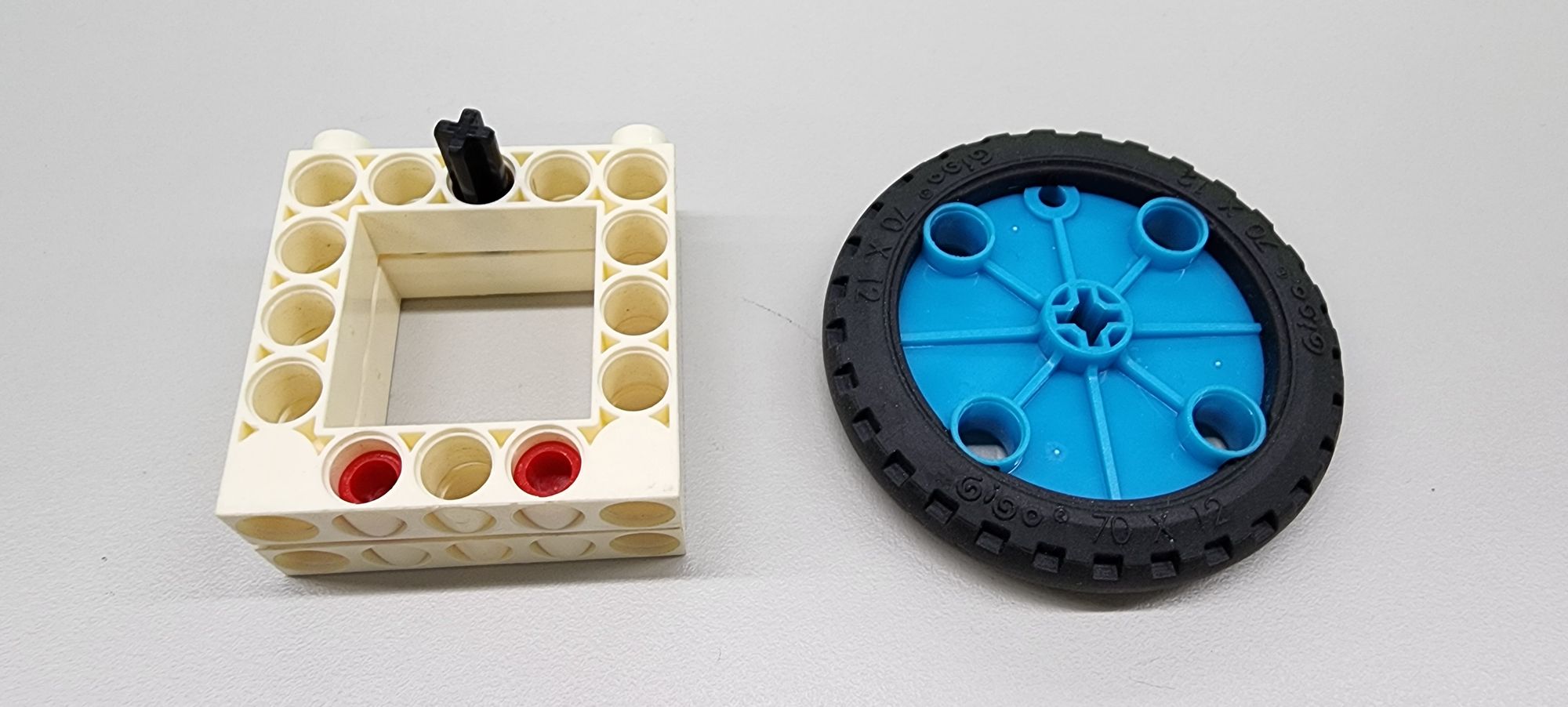
首先依照圖示將5×5孔正方框、長結合鍵以及30mmⅡ軸組裝成部件H(圖十八),在組裝時需要留意30mmⅡ軸的安裝方向。
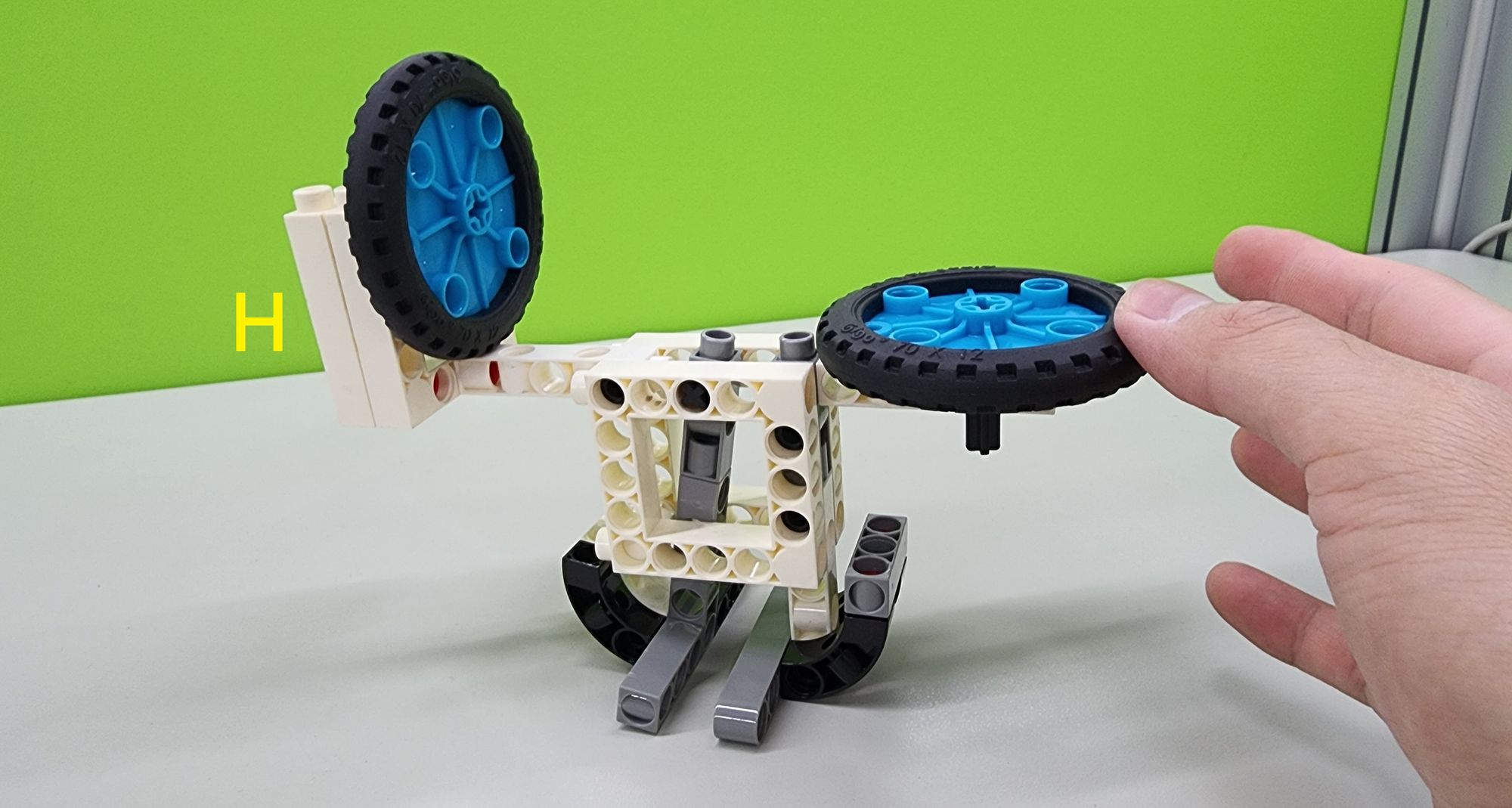
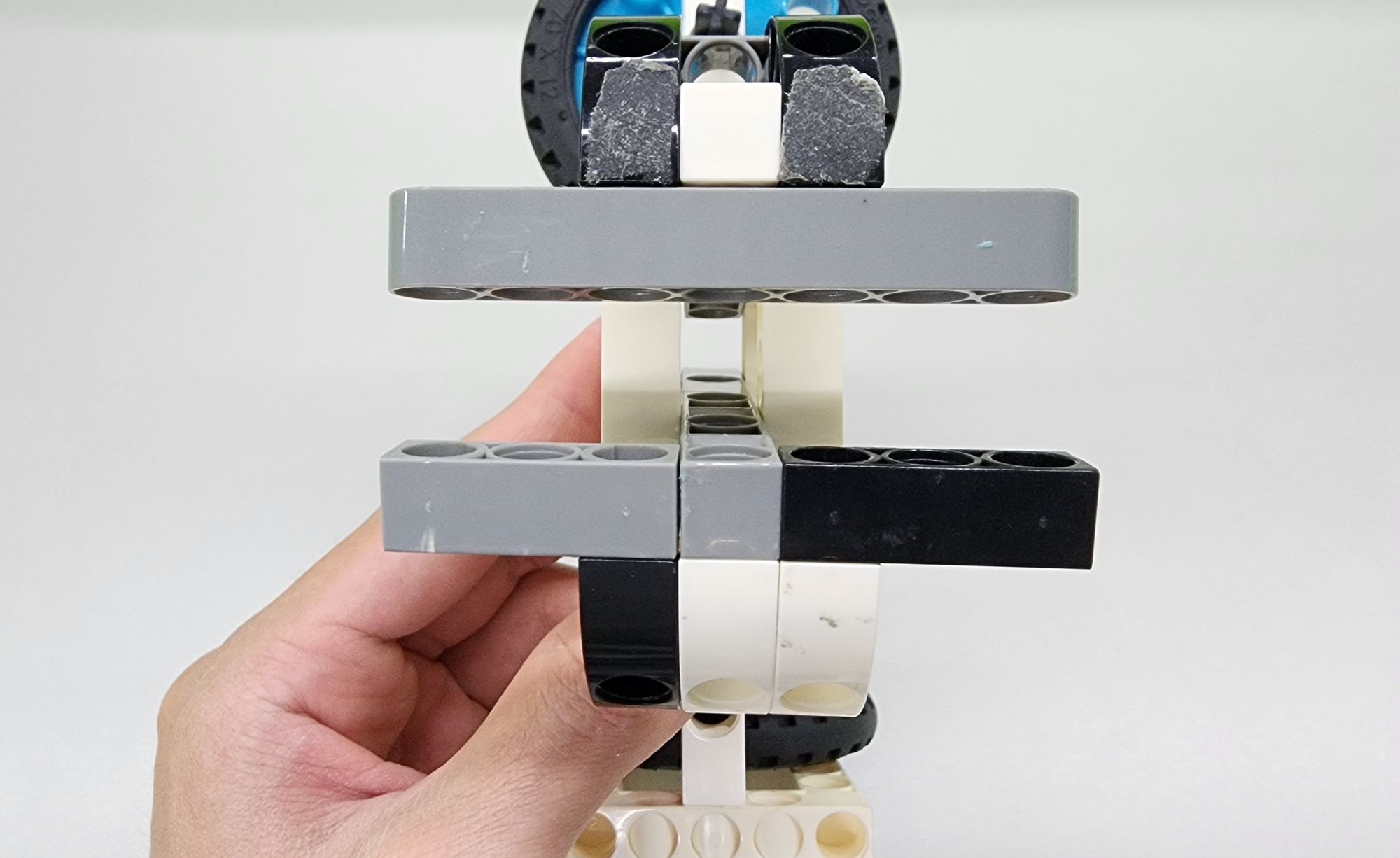
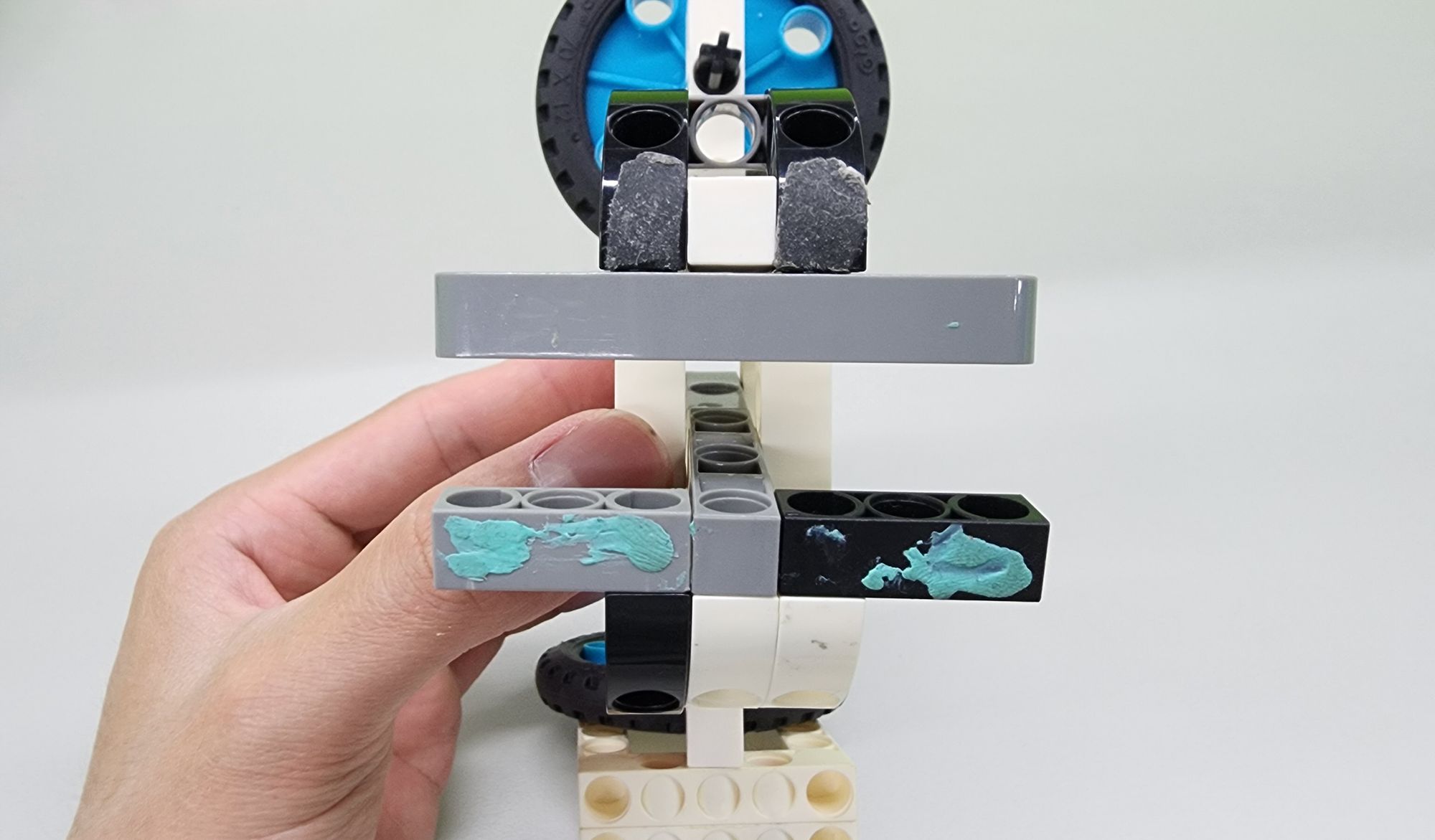
接著將70×12mm橡膠輪與部件H上方的30mmⅡ軸結合,並將部件H安裝在部件A的後方(圖十九),斜坡自走玩具的模型就大致完成囉。
在進行模型操作前,我們要將模型的底部翻過來(圖二十),並在底部黏上少許的黏土(圖二一)。這麼做是為了增加模型底部與斜坡的摩擦力,讓斜坡自走玩具走得更加順利,當黏土使用得太多時,模型會黏在斜坡上;當黏土使用得太少時,模型會在斜坡上滑動,因此要透過不斷地實驗找到最適合的黏土用量,你也可以將黏土替換成砂紙或是止滑墊,測試看看哪種材質會出現最好的行走效果唷!
◆ 模型操作
在進行模型操作前,我們需要先準備一個能夠讓斜坡自走玩具行走的斜坡,浣熊老師這邊使用的是保麗龍板,大家也可以試著使用木板或其他表面較為粗糙的板子,使用物品將板子架高,一個簡易的斜坡就製作完成了(圖二二)。

現在就讓我們來操作仿生自走獸吧!
我們可以將仿生自走獸放在斜坡的最高處,接著輕輕推動它並使它進行晃動,如果運作成功的話,仿生自走獸就會一步一步走下斜坡唷(影片二)。
◆ 問題排除
若你的仿生自走獸無法順利進行移動,可以參考以下解決方法:
1. 調整黏土的用量,或是將黏土壓得更密實。
2. 透過旋轉的方式調整2凸單孔轉向結合器的角度,此調整會影響到斜坡自走玩具的步幅。
3. 檢查前後腳使用的零件是否鬆動或歪斜,影響到前後腳的移動方式。
4. 調整3孔1/4弧長條在前腳上的角度,讓7孔圓角長條完全貼齊水平面。
◆結語
透過這次所製作的仿生自走模型,我們可以用簡單的結構呈現出生物的行走方式,而日常生活中有許多的發明也都是向大自然生物借鑑的成果,如:飛機翅膀的形狀和翼尖的設計靈感來自於鳥類的飛行方式,或是參考蜘蛛絲強度和彈性而開發出的高強度人造纖維等,讓我們不禁期待未來大自然還能帶來什麼樣的驚喜。
如果你想要製作更多不同造型的斜坡自走模型,也可以參考智高的7462-CN 野生動物探險趣-自走積木,一起和招潮蟹菲迪、短吻鱷魚奧利弗等朋友們,進行一趟有趣的冒險吧!今天的分享就到這邊,喜歡這篇文章的話記得幫浣熊老師大力分享出去,我們下次見囉,拜拜!

◆科學原理:
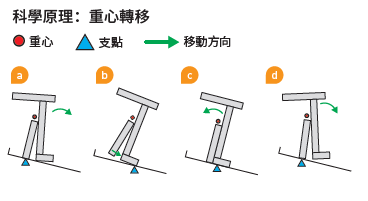
斜坡自走玩具模型使用到了重心和摩擦力的科學原理,當我們輕輕推動模型時,會導致它左右晃動,產生重心的轉移(圖二三),當重心往後時,前腳會像前擺出,就像是走路時跨出步伐一樣;當重心往前時,後腳會貼齊前腳,使得後腳的位置相較之前的位置更靠前,達到向前走動的效果(影片三)。摩擦力則是作用於前後腳與保麗龍板之間,前後腳底部的黏土就像是鞋紋或胎紋一樣,能夠增加抓地力,避免模型在移動時候的打滑。
◆課綱參考:
生 s-IV-2 能運用基本工具進行精確的材料處理與組裝。
INb-Ⅲ-3 物質表面的構造與性質不同,其可產生的摩擦力不同;摩擦力會影響物體運動的情形。
Eb-Ⅳ-1 力能引發物體的移動或轉動。
Eb-Ⅳ-8 簡單機械,例如:槓桿、滑輪、輪軸、齒輪、斜面 等,通常具有省時、省力,或者是改變作用力方向等功能。
◆參考資料:
 維基媒體專案貢獻者
維基媒體專案貢獻者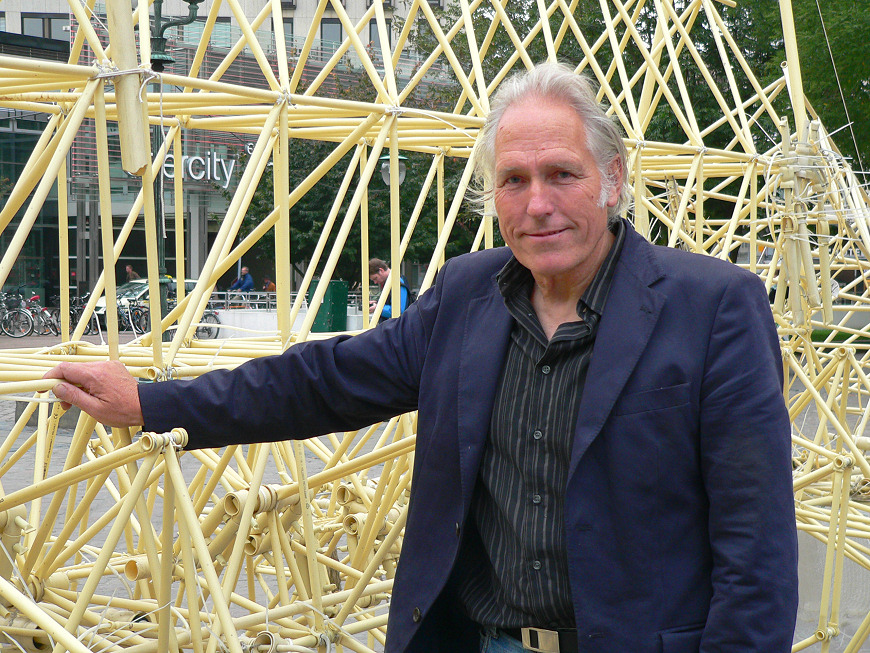
 維基媒體專案貢獻者
維基媒體專案貢獻者 维基媒体项目贡献者
维基媒体项目贡献者
Please sign in to vote.