生活中的科學EP12-夾娃娃機(#1409)

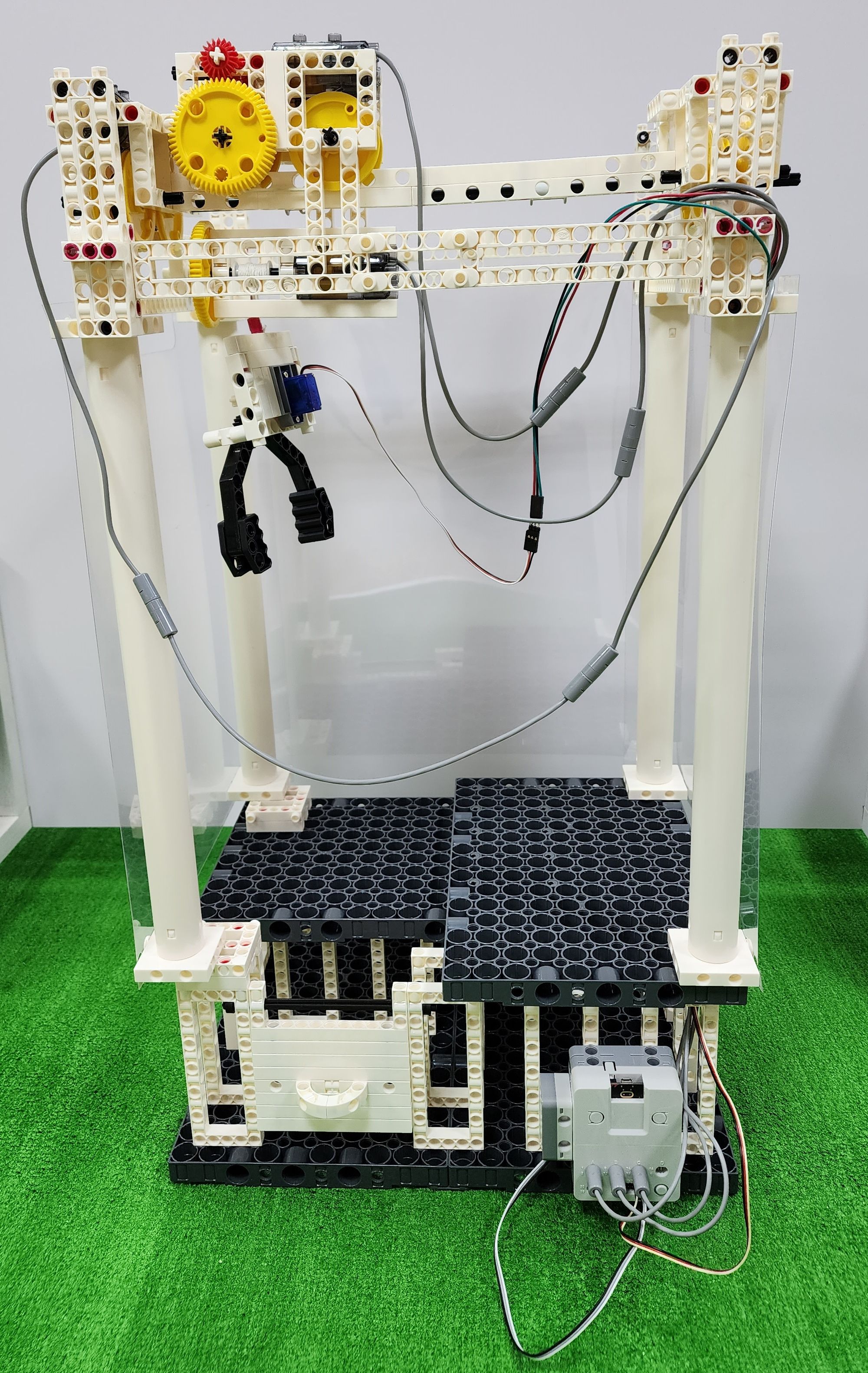
大家好我是浣熊老師,不知道各位有沒有發現,這幾年台灣的夾娃娃機店如雨後春筍般冒出,在最高峰時甚至可以在一條馬路上看到好幾間夾娃娃機店呢。
你們有玩過夾娃娃機的經驗嗎?夾娃娃機是一種具有抓取裝置的娛樂設備,當我們投入十元硬幣後,需要使用搖桿在有限的時間內夾取機台內的物品,如公仔、布偶、食物、日用品..等。只要成功夾取即可獲得該物品,而成功的難度則由機台的持有者(台主)設定,要如何只花最少的錢就成功夾取物品,在在考驗著玩家的技巧和運氣。現在就讓浣熊老師一步步教大家如何製做一台夾娃娃機吧!

◆組裝步驟
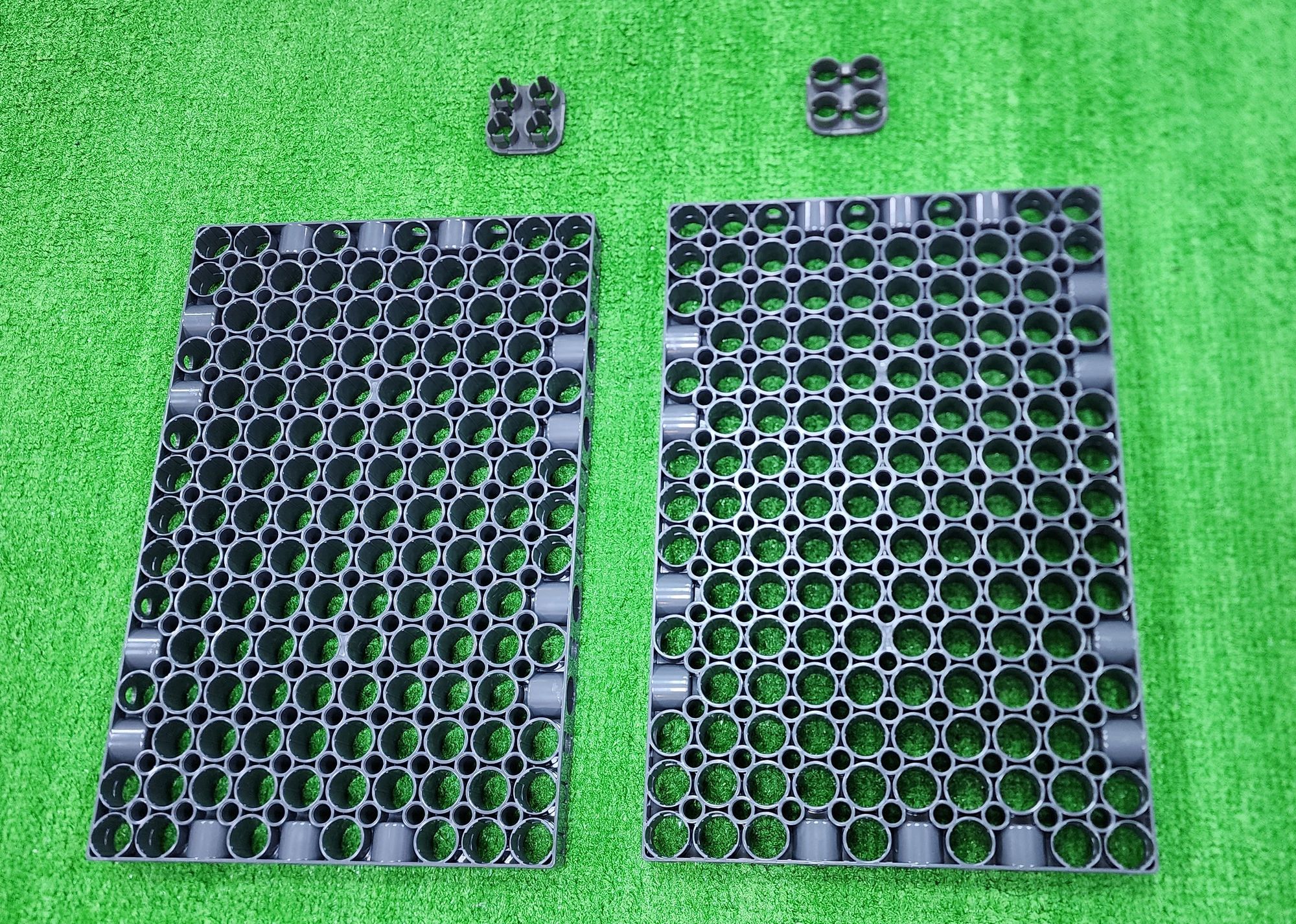
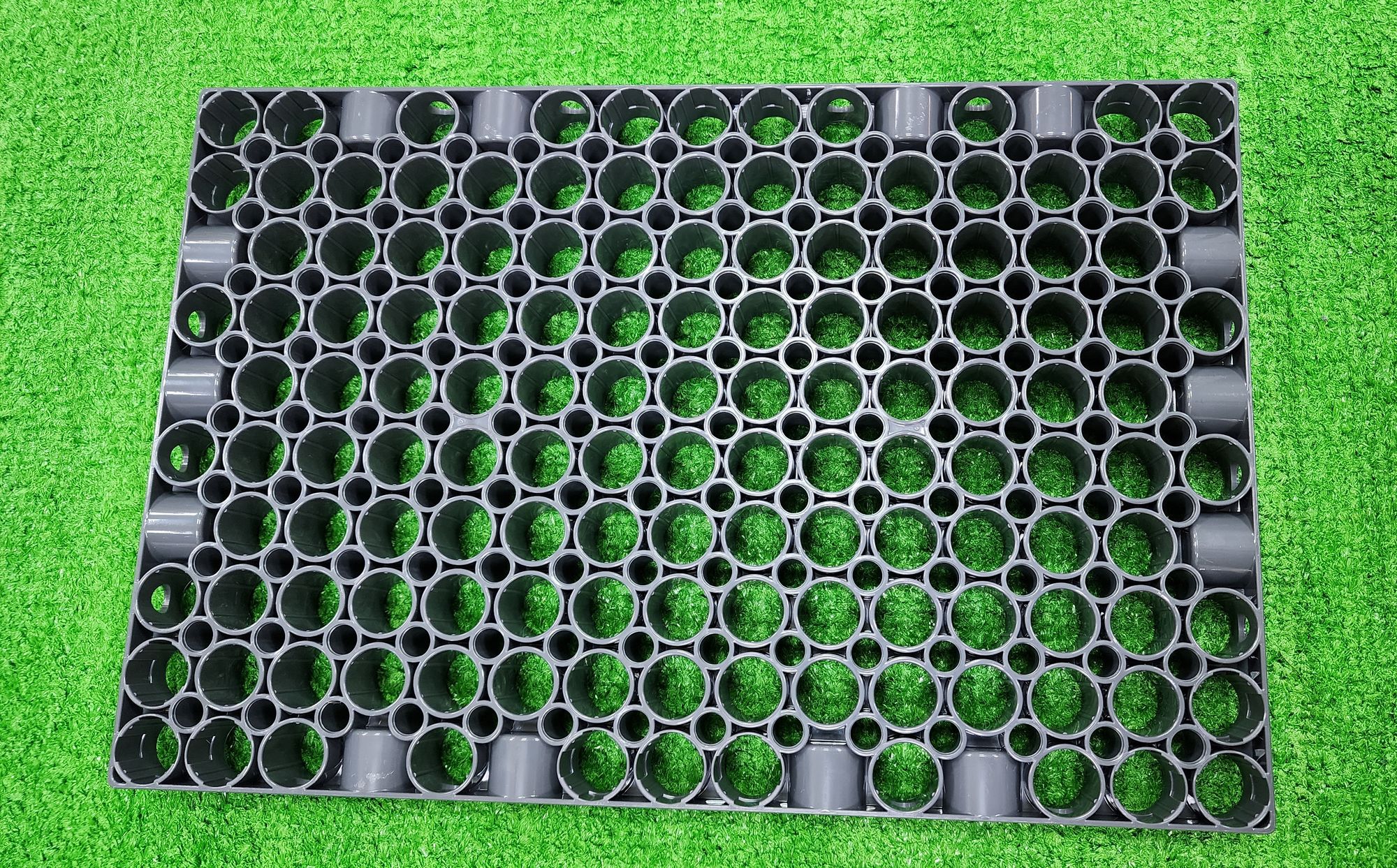
第一步我們要來製做夾娃娃機的底座,需要使用到20x30大底盤以及大底盤結合器(圖一)。
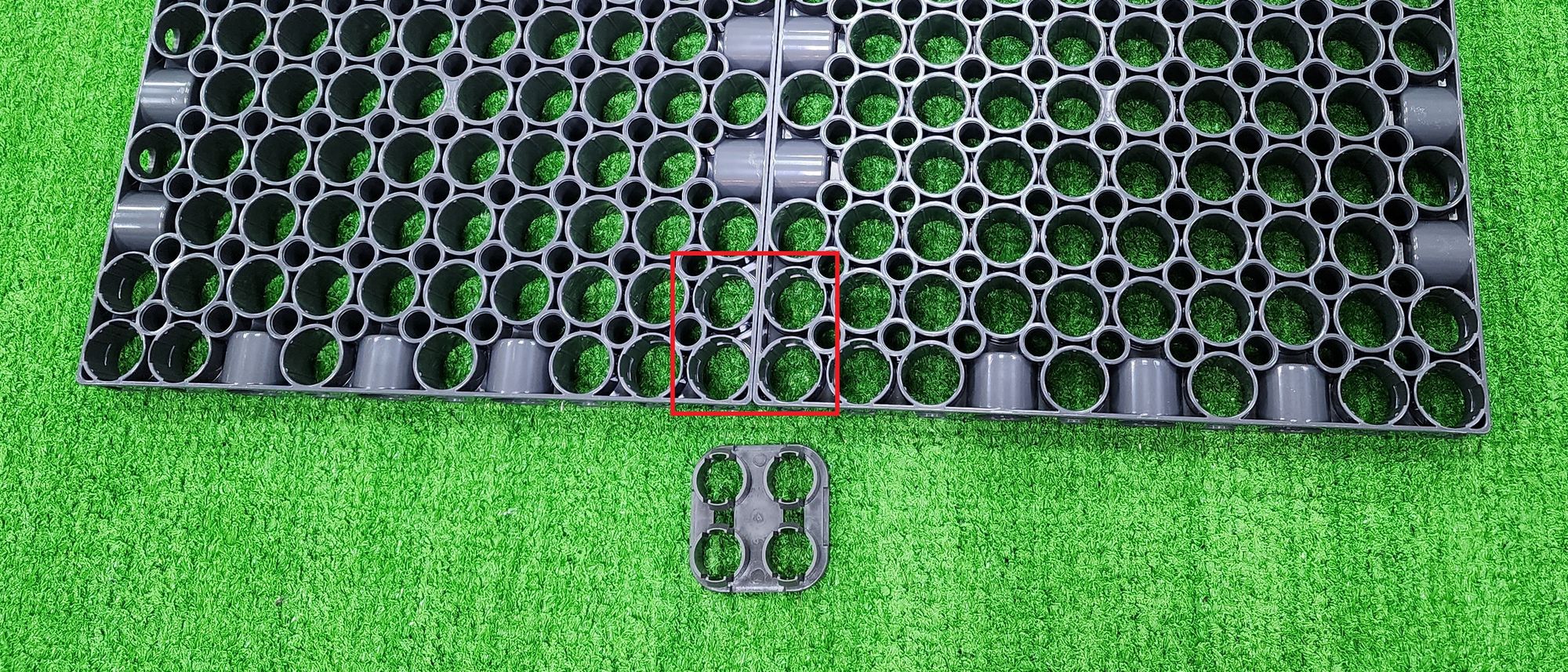
將兩個20x30大底盤併攏,並依照圖示將大底盤結合器安裝在20x30大底盤的下方(圖二、圖三)。

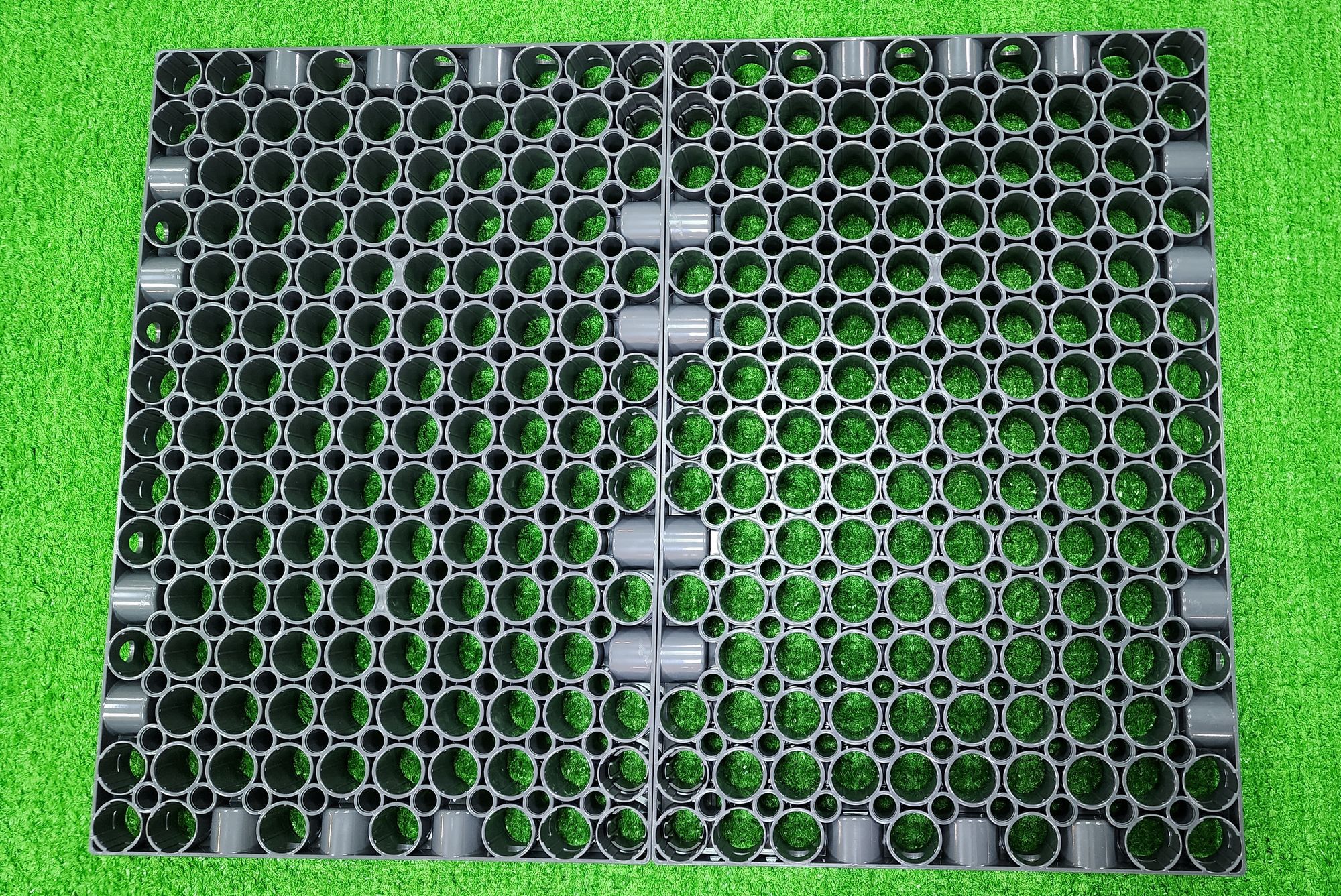
將兩個大底盤結合器都安裝在20x30大底盤的下方後,夾娃娃機的底座就完成了(圖四)。
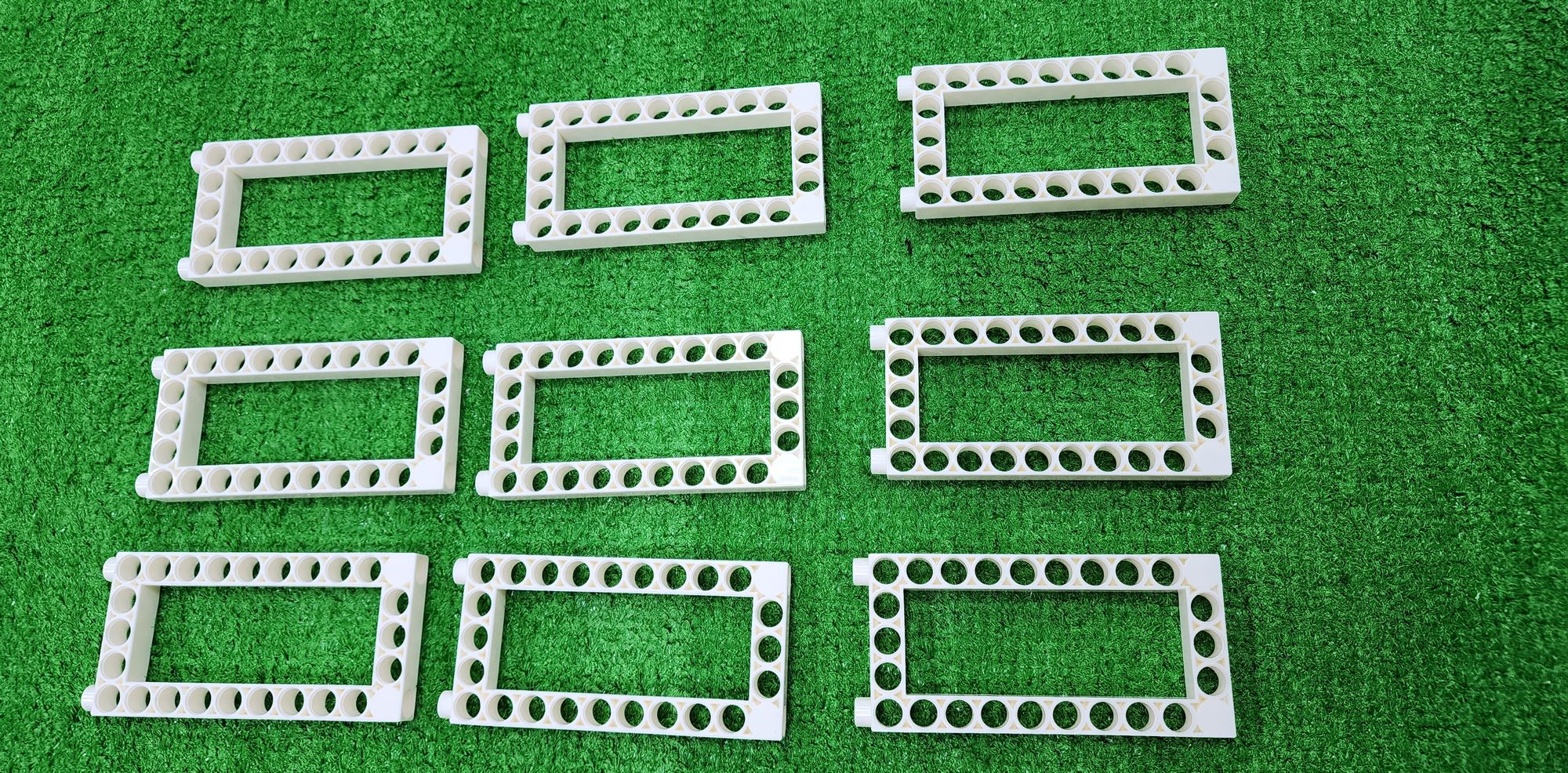
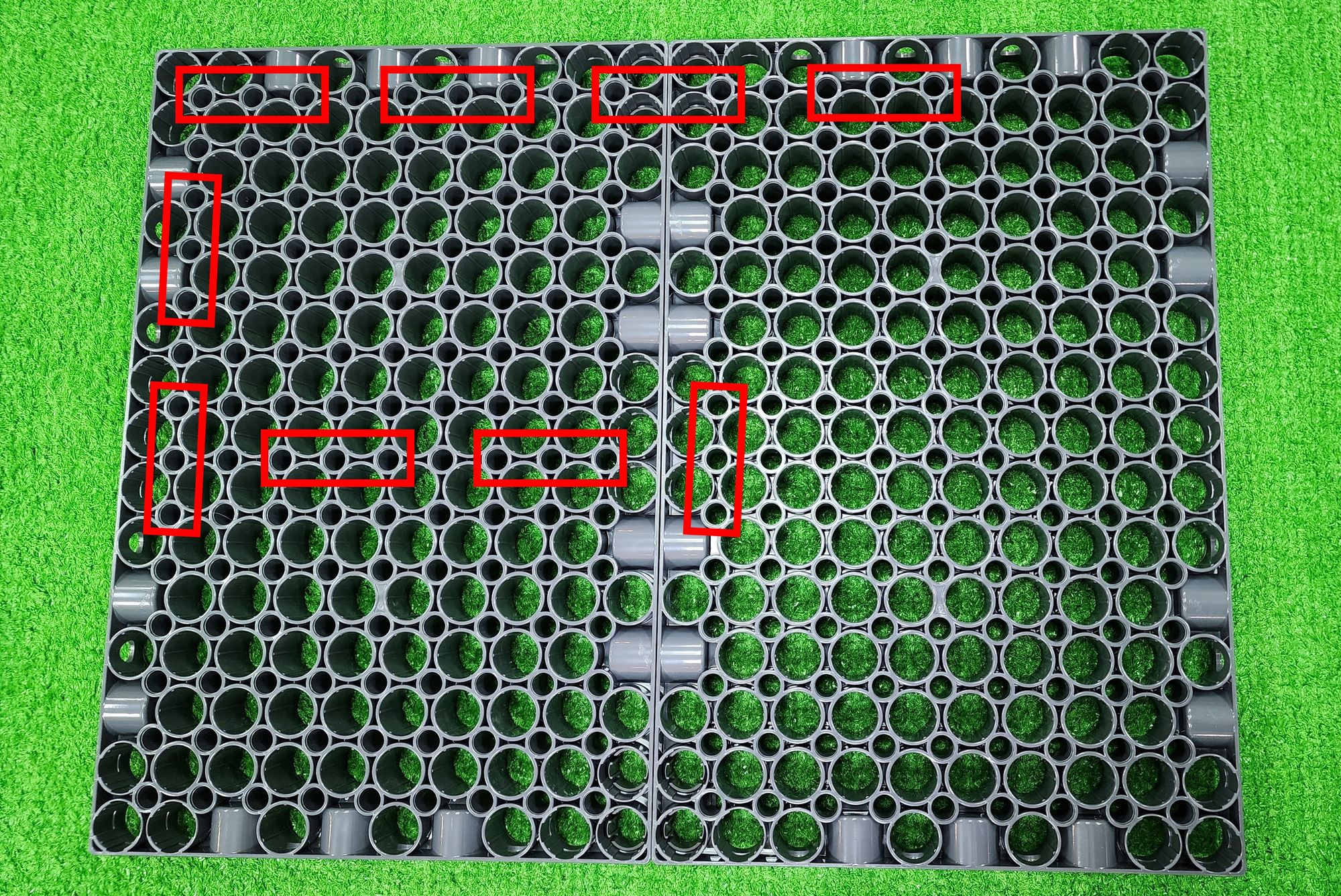
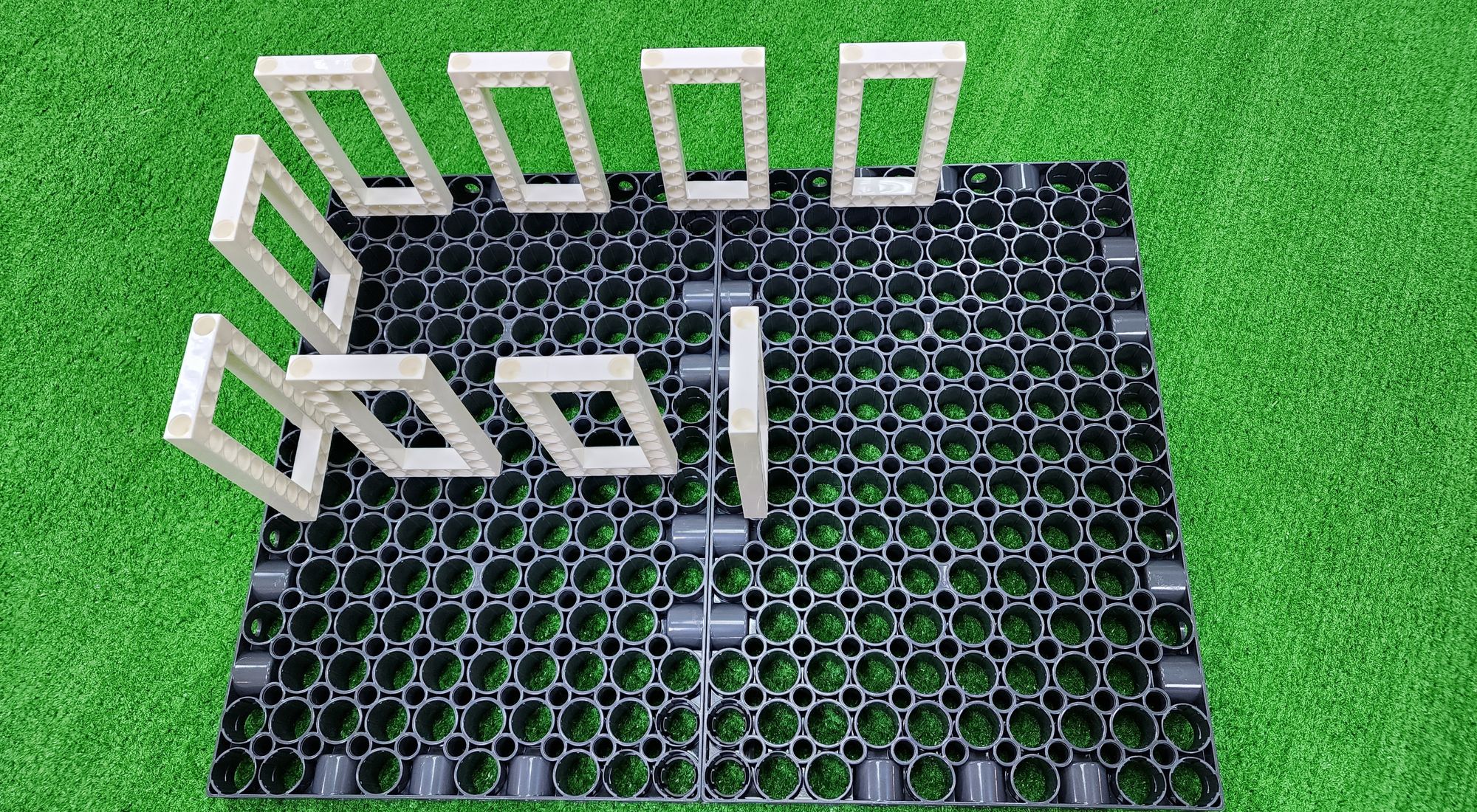
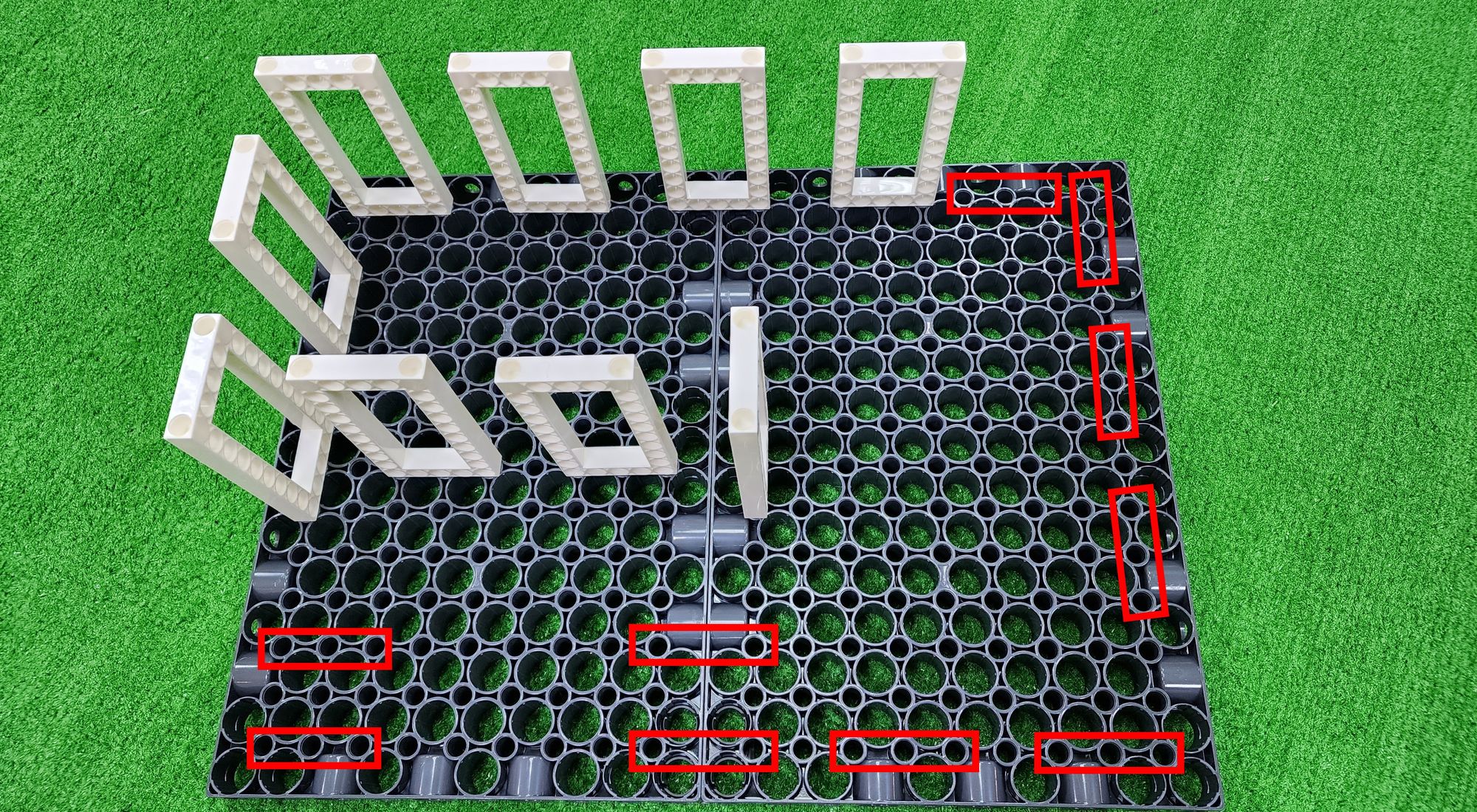
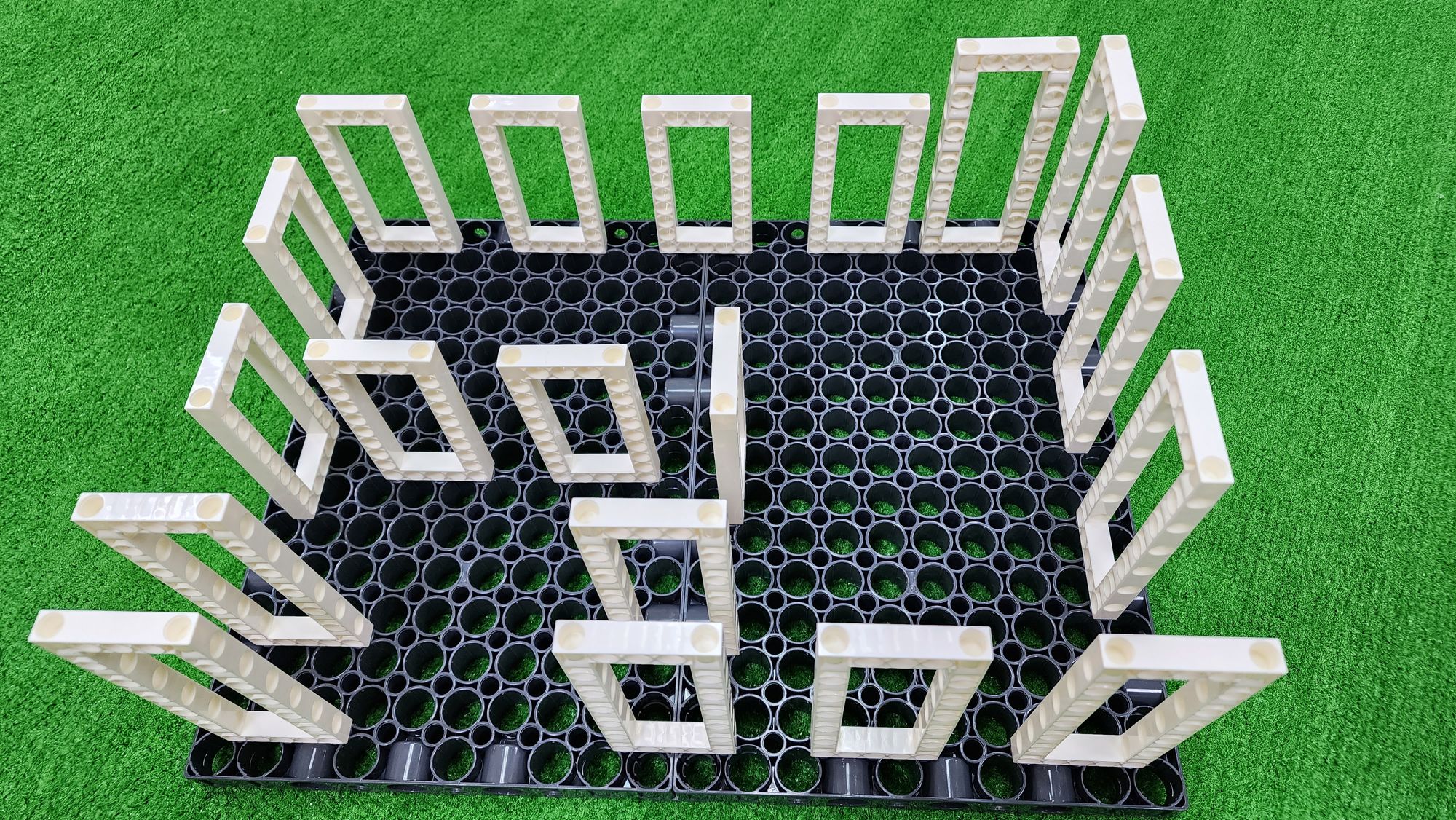
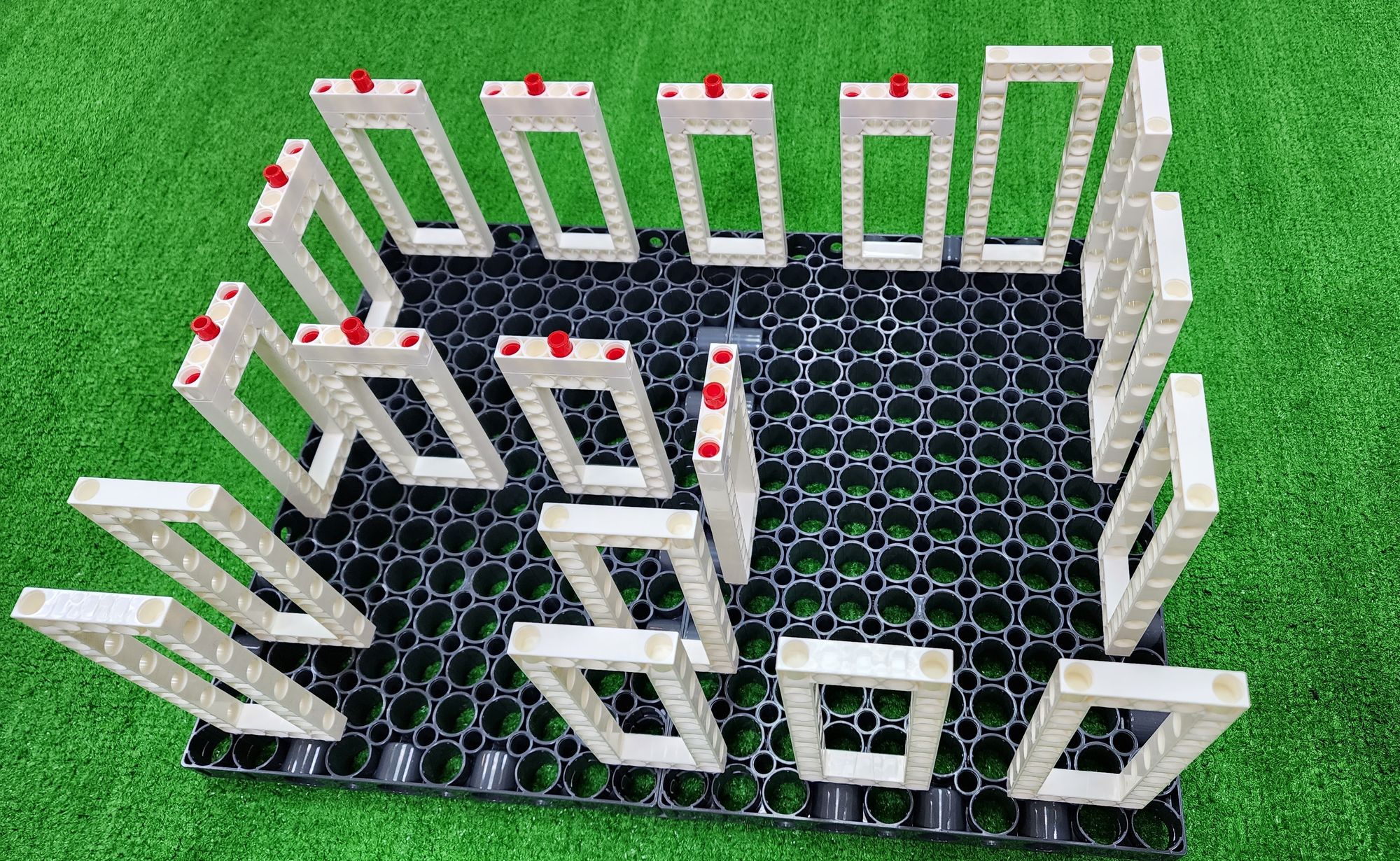
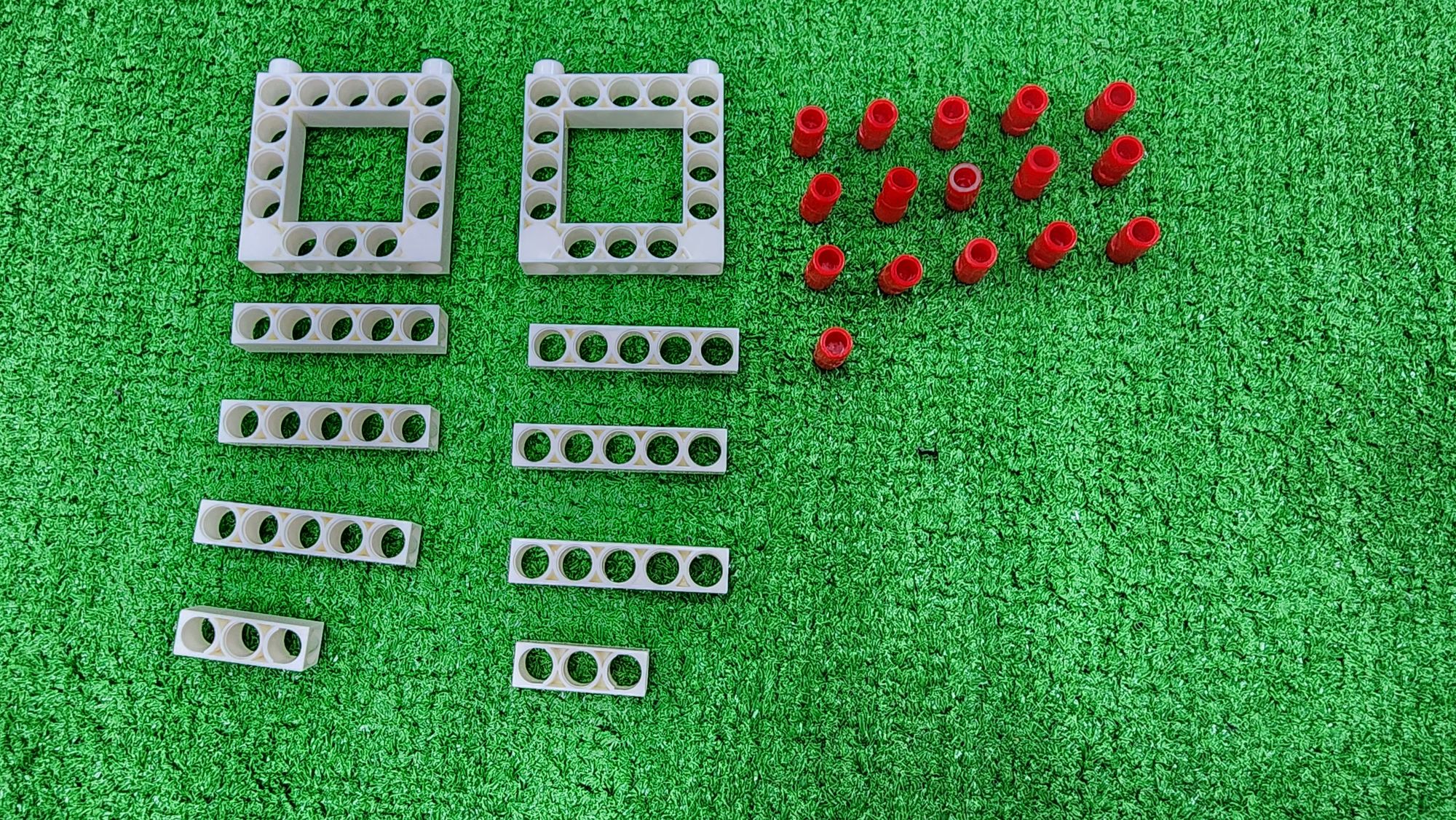
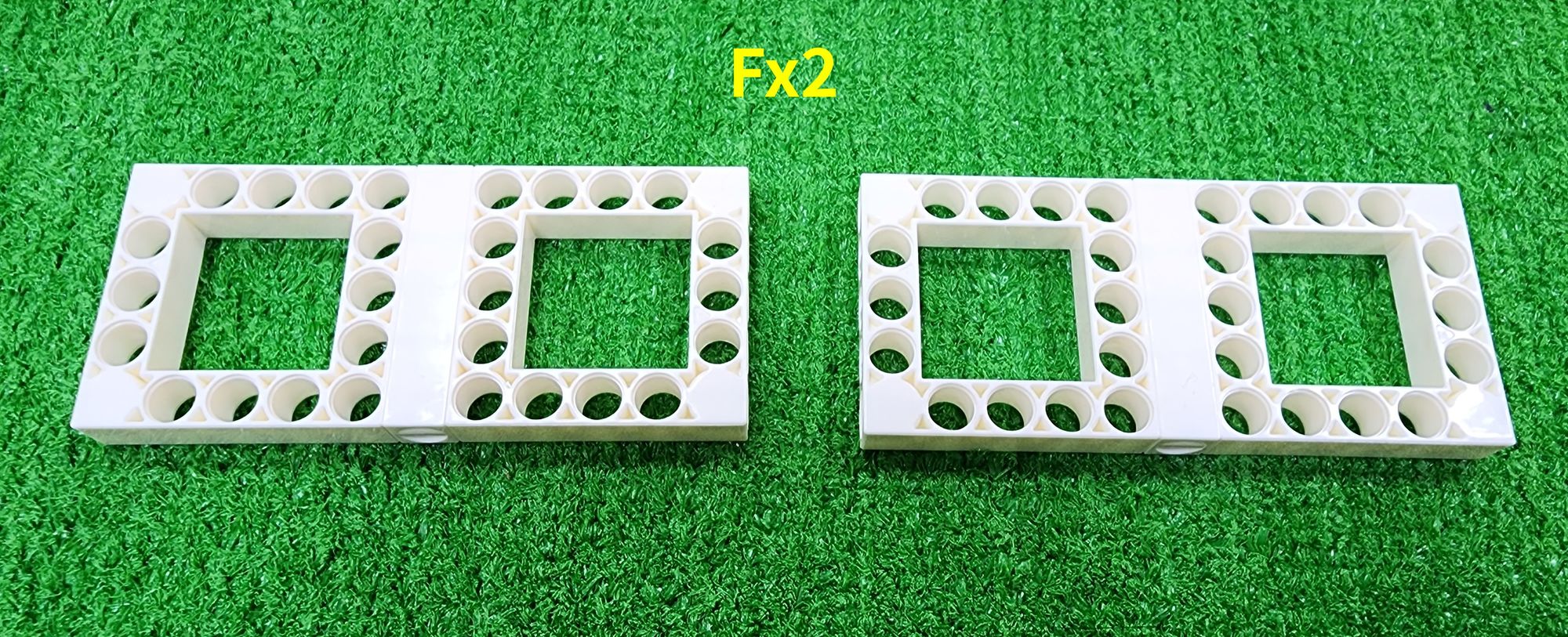
第二步我們要將夾娃娃機架高,以便進行置物平台的安裝,需要使用到5x10孔長方框(圖五),將它們依照圖示中的位置安裝在20x30大底盤的上方(圖六、圖七)。
接著需要使用到5x13孔超長方框(圖八),同樣將它們依照圖示中的位置安裝在20x30大底盤的上方(圖九、圖十)。

第三步需要使用5孔長條以及長結合鍵(圖十一),將它們依照圖示組合成九個部件(圖十二),用於連接置物平台。

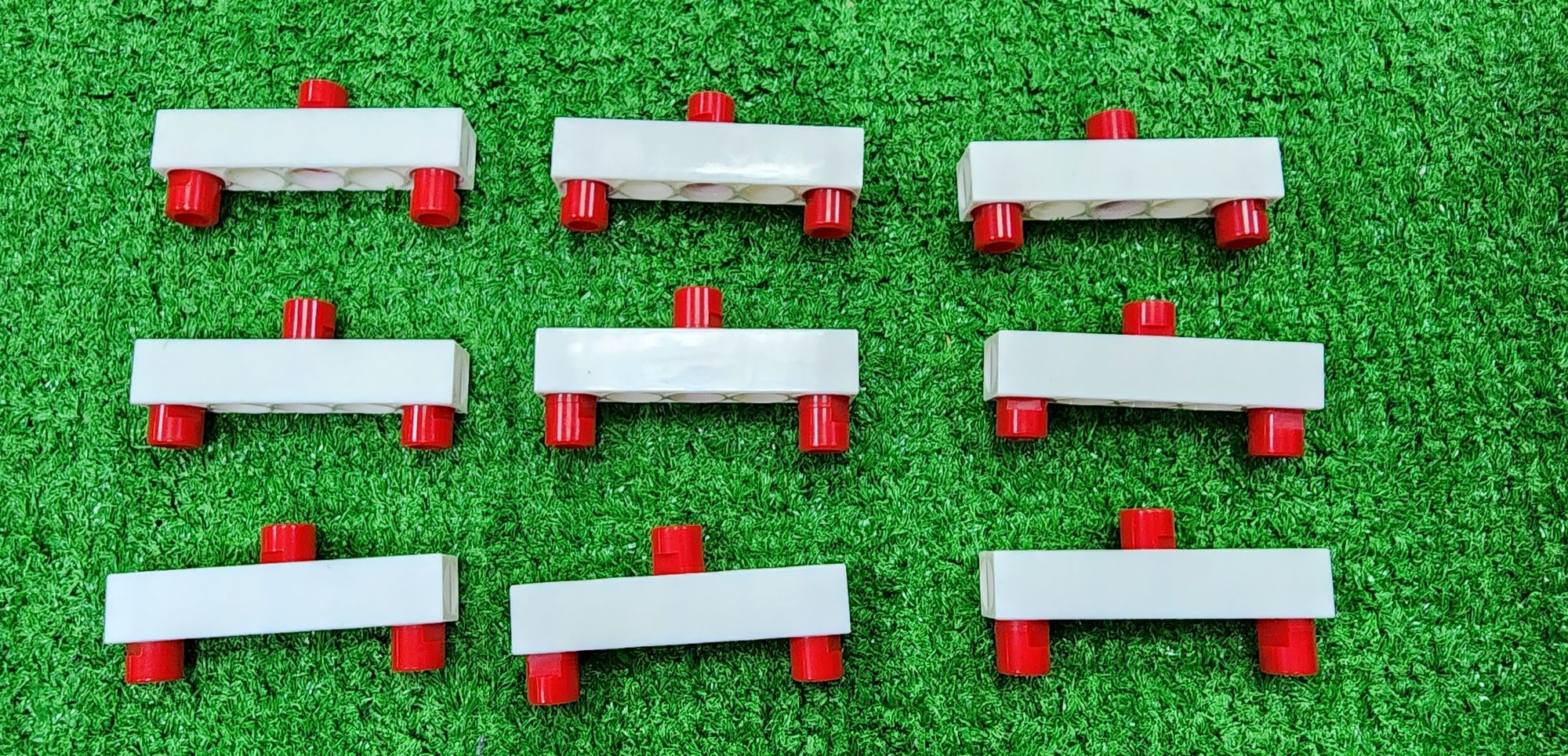
接著將完成的9個部件安裝在5x10孔長方框的上方(圖十三)。
第四步我們要安裝左側的置物平台,需要使用一片20x30大底盤(圖十四)。
將20x30大底盤放置於5x10孔長方框的上方,並依照圖示將長結合鍵結合在20x30大底盤的下方(圖十五),完成左側置物平台的固定(圖十六)。
第五步要連接右側的置物平台,需要使用到十四個長結合鍵(圖十七),將它們依照圖示放置於5x13孔超長方框的上方(圖十八)。

第六步我們要安裝右側的置物平台,同樣使用一片20x30大底盤(圖十九)。
將20x30大底盤放置於5x13孔超長方框的上方,並依照圖示將長結合鍵結合在20x30大底盤的下方(圖二十),完成右側置物平台的固定(圖二一)。
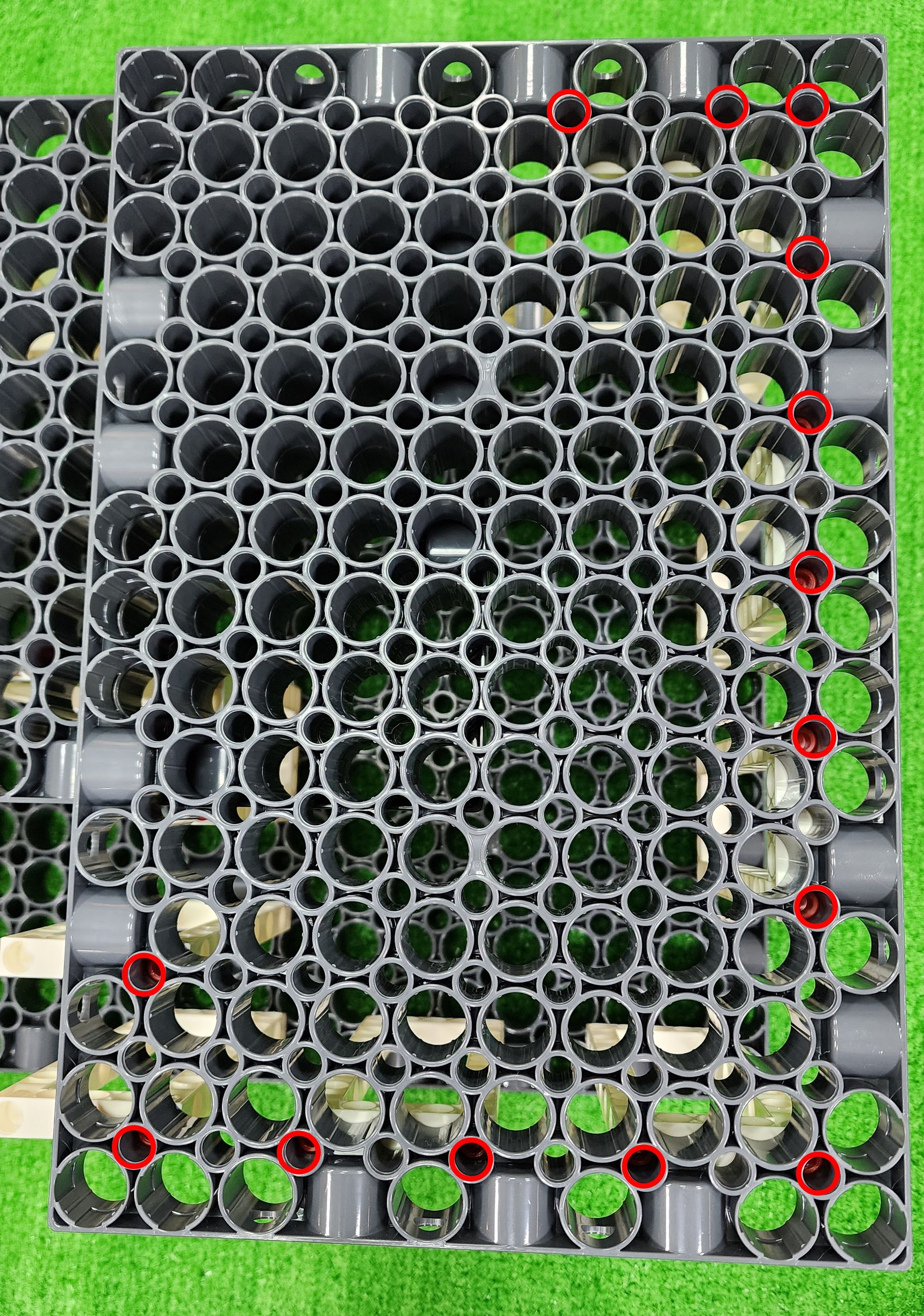
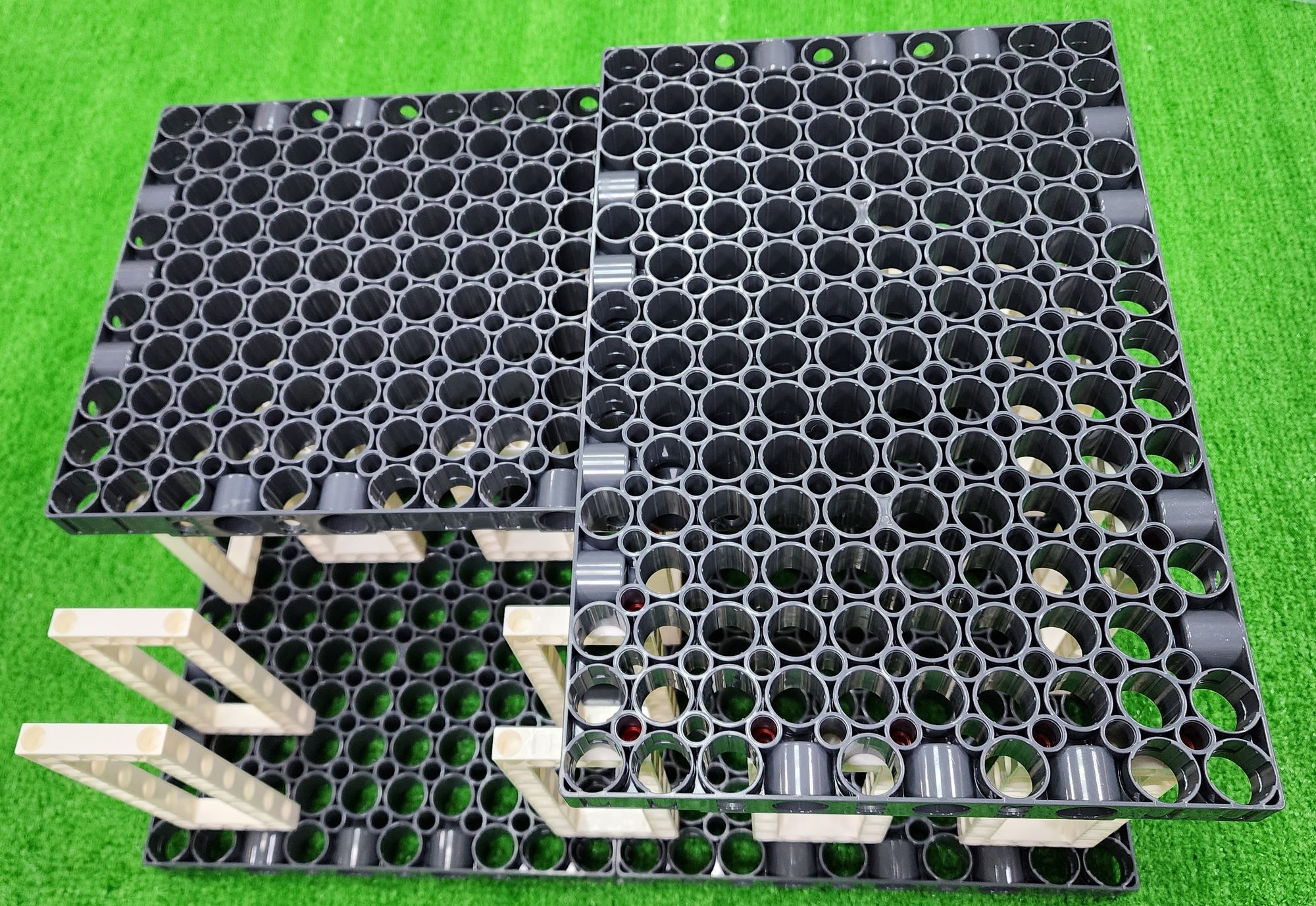
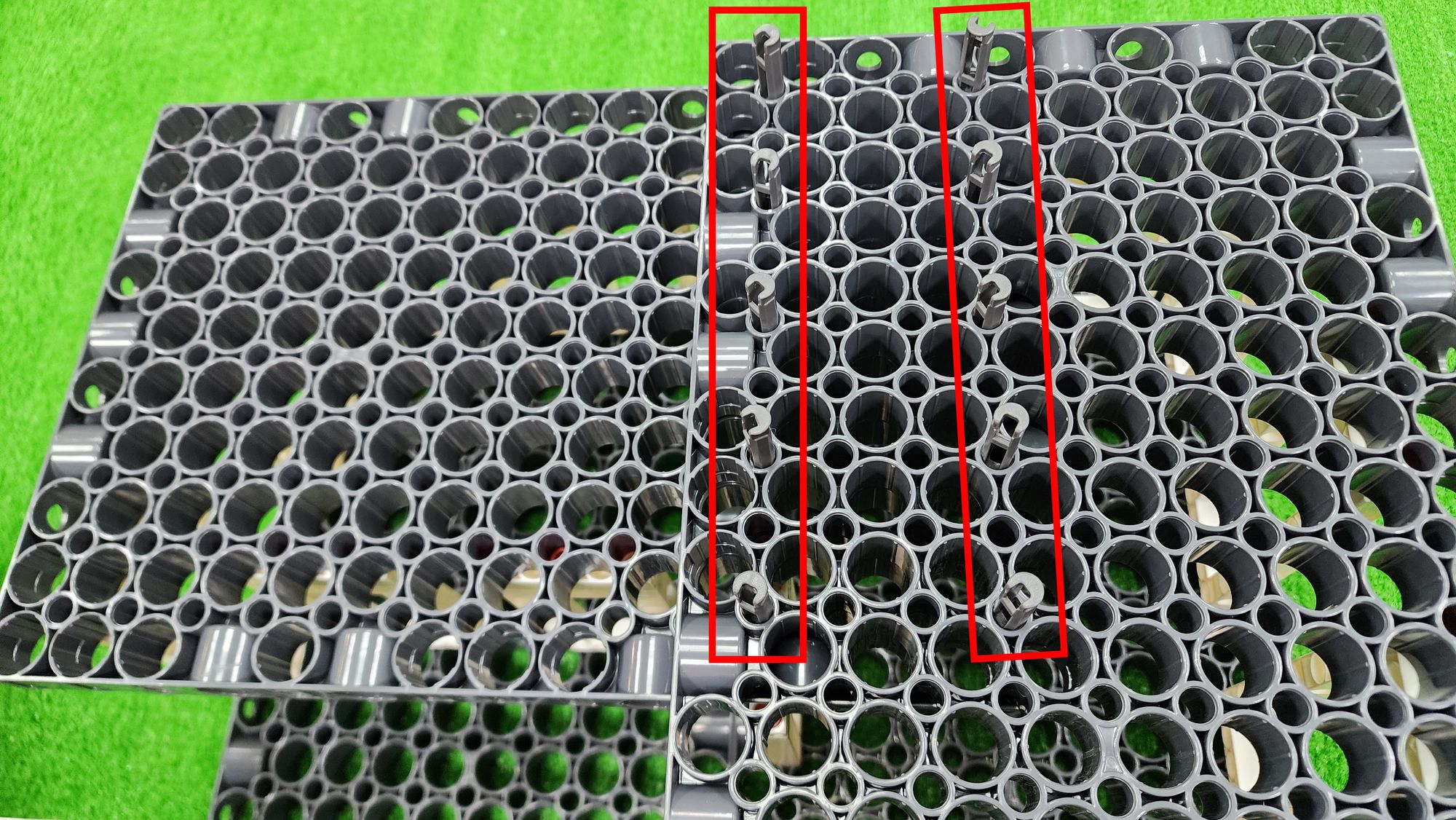
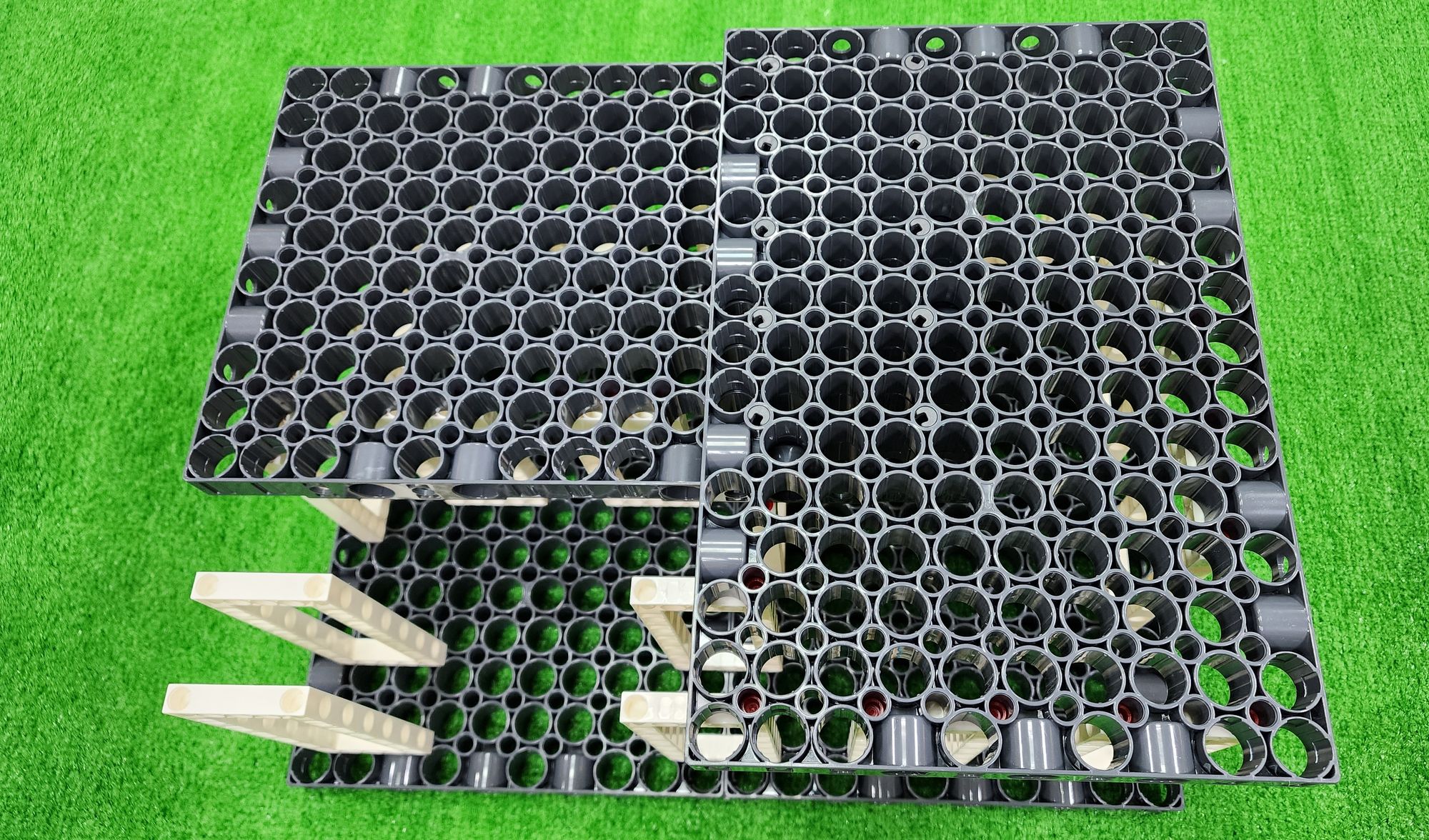
第七步我們要來固定左側與右側的置物平台,需要使用到一種名為栓釘鍵(7066-W10-A1S)的零件(圖二二)。

將栓釘鍵依照圖示插入20x30大底盤(圖二三),並將它們完全推入到底,完成左側與右側置物平台的固定(圖二四)。
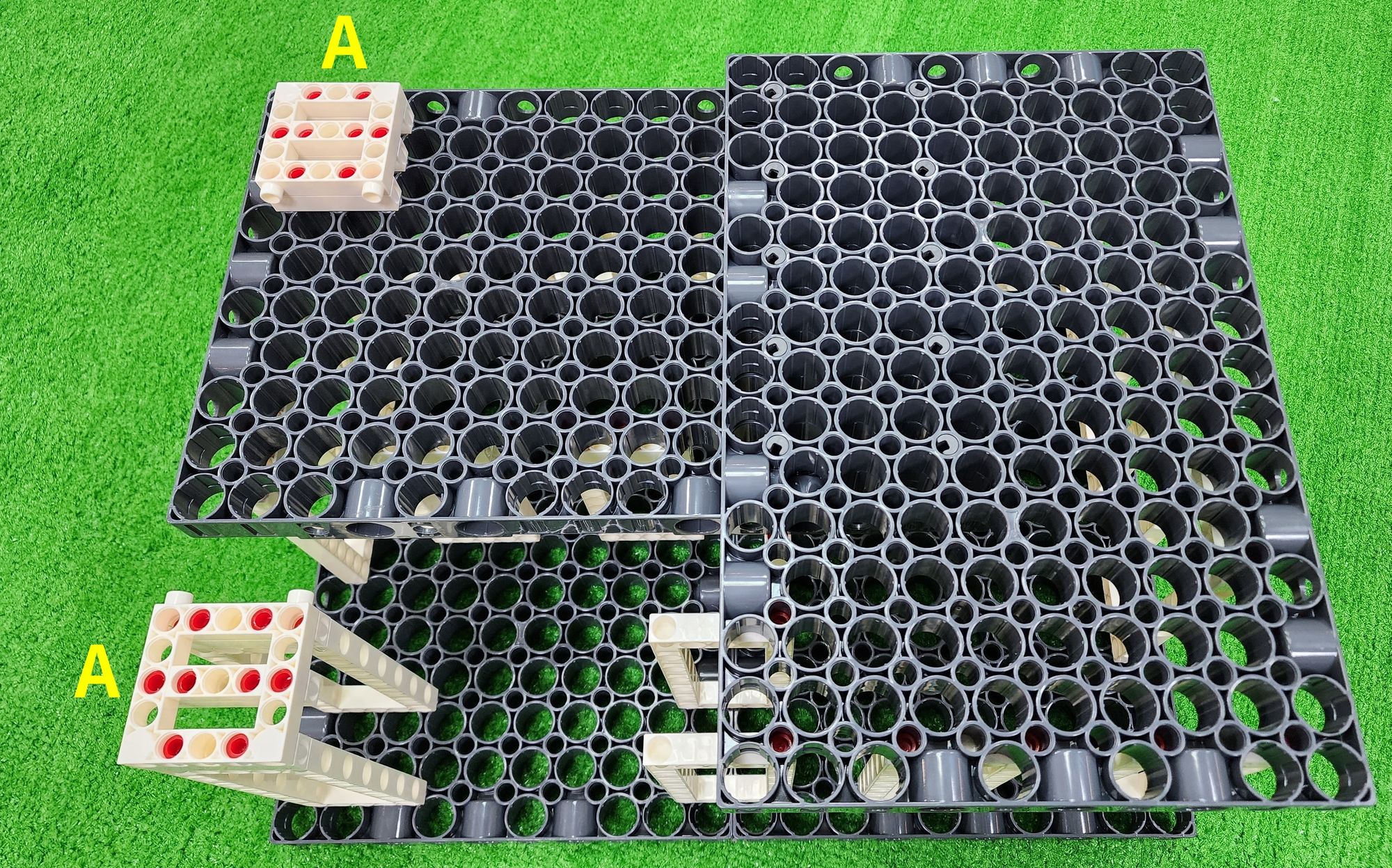
第八步我們要來製做夾娃娃機左前以及左後方的支架底座,需要使用到5x5孔正方框、5孔長條、3孔長條以及長結合鍵(圖二五)。
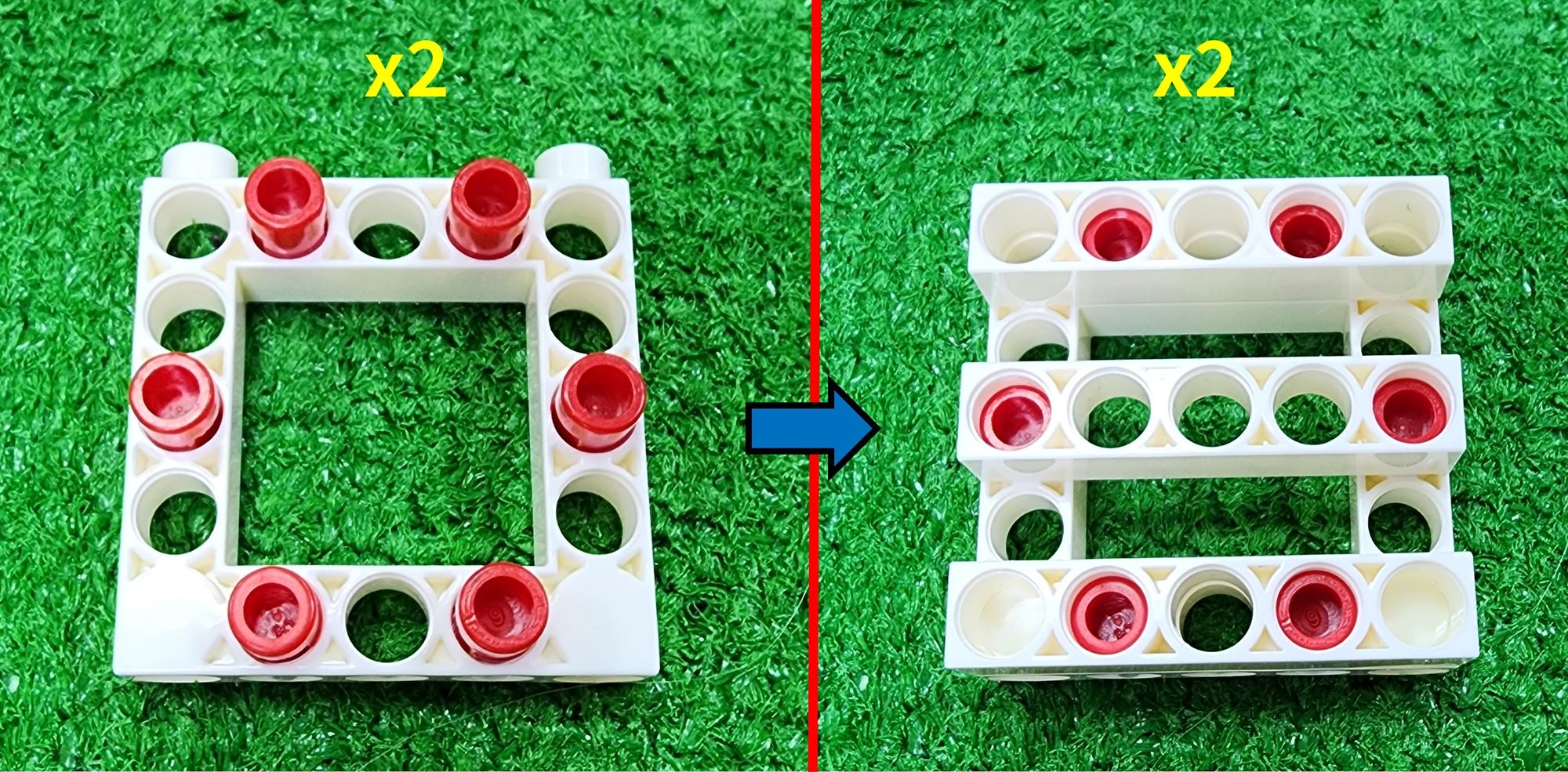
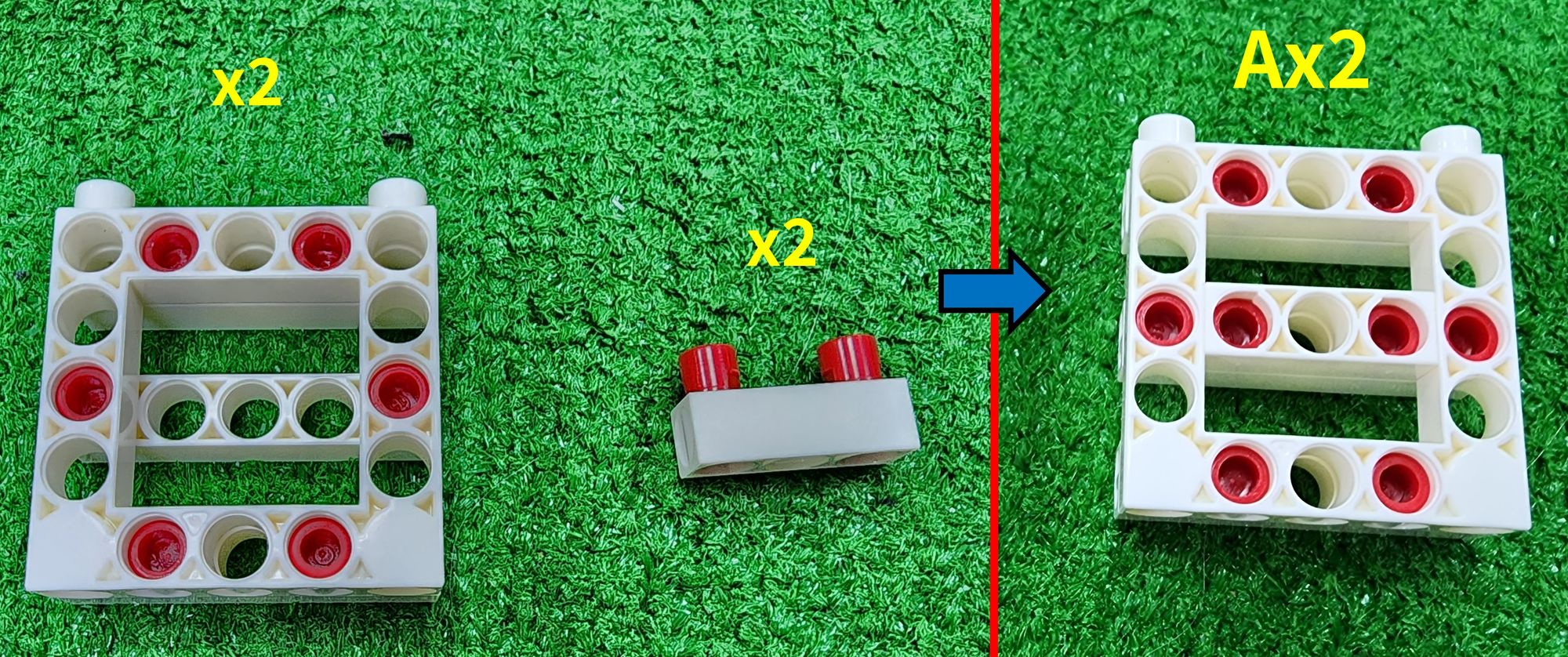
首先依照圖示將5x5孔正方框、5孔長條以及長結合鍵結合在一起(圖二六),接著翻面後安裝上3孔長條以及長結合鍵,完成兩個部件A的製作(圖二七)。
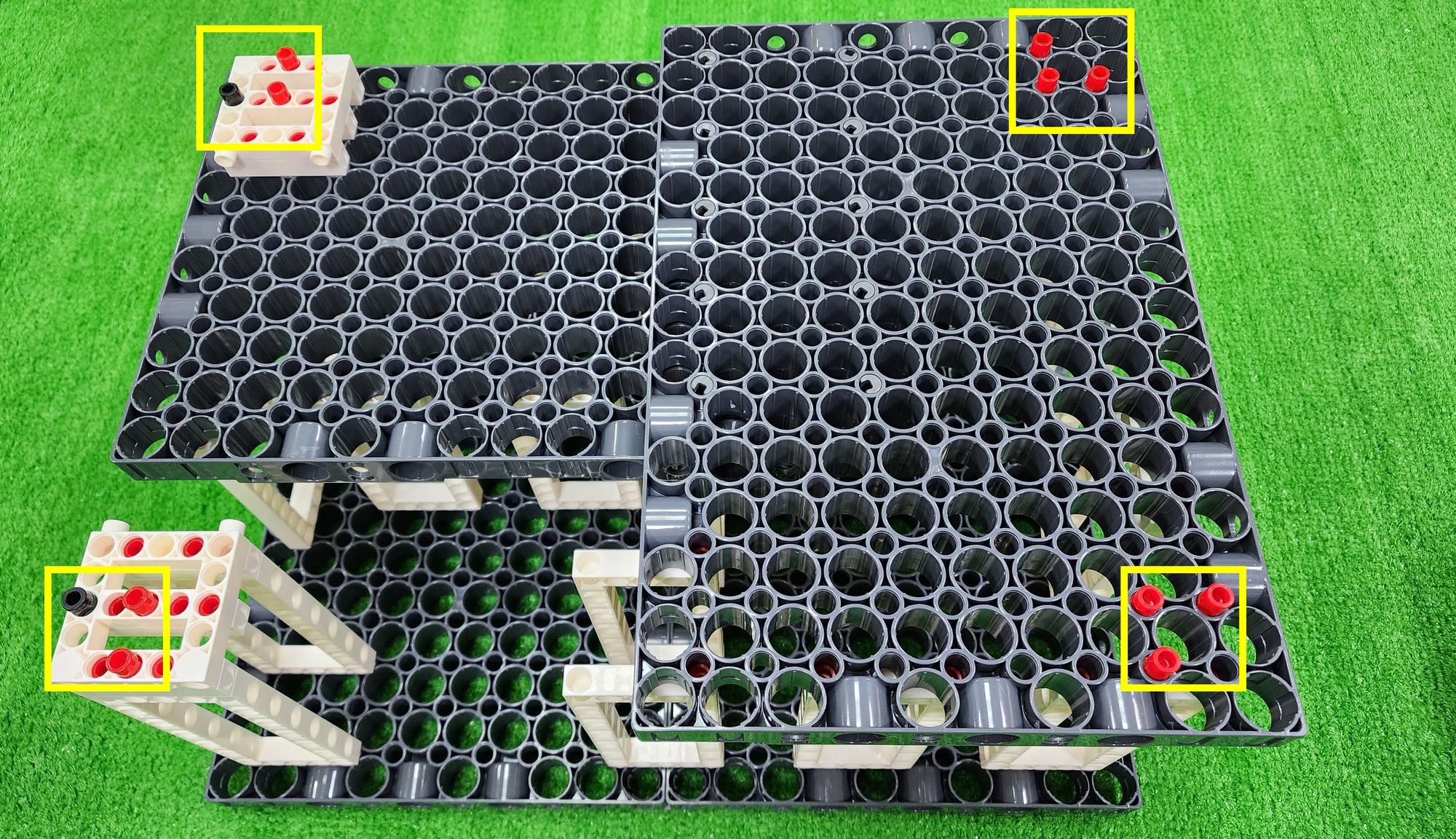
為了固定部件A,我們這邊要使用長結合鍵(圖二八),將長結合鍵分別安裝在夾娃娃機左前方的5x13孔超長方框以及左後方的20x30大底盤上方(圖二九)。

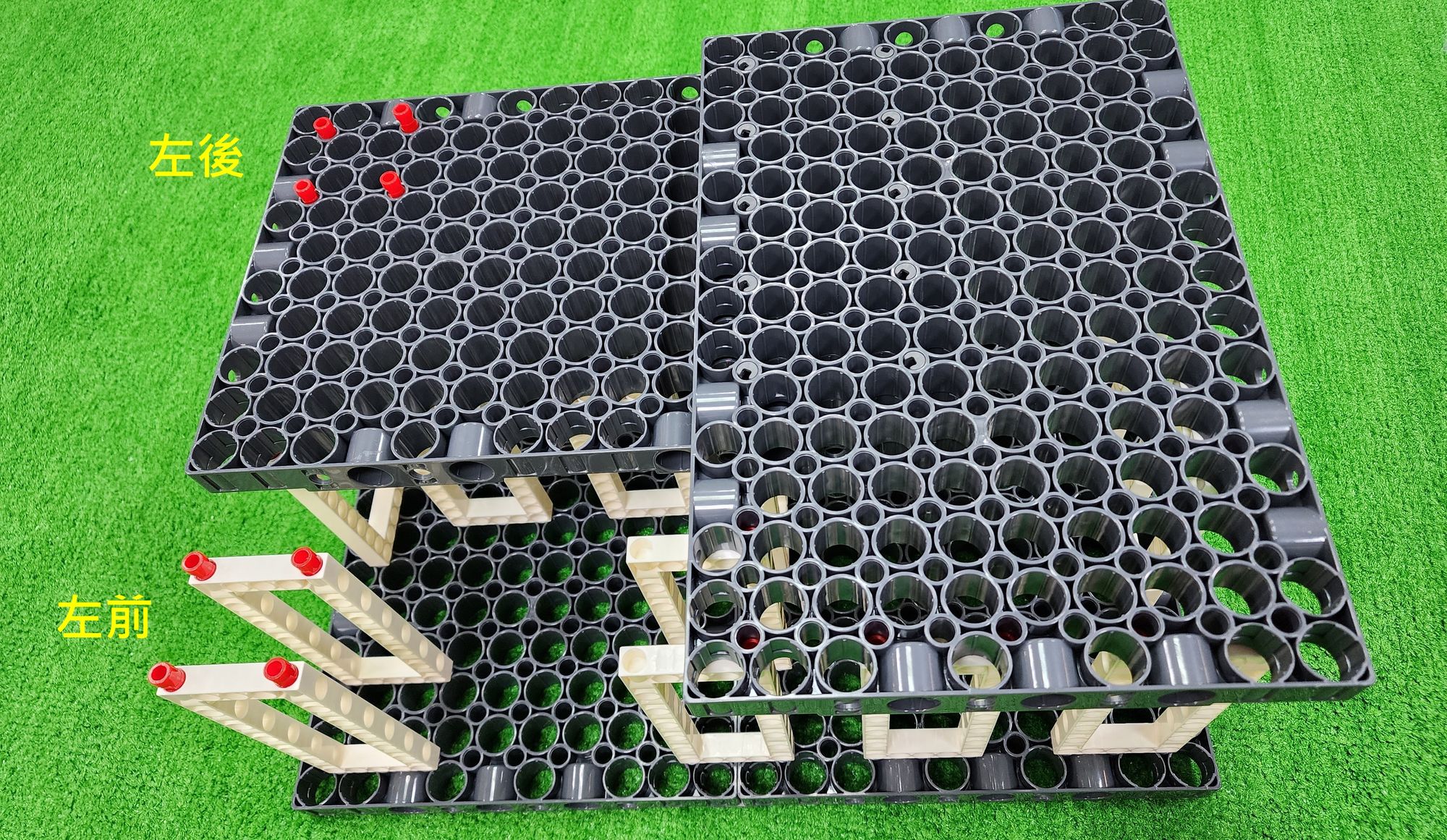
最後依照圖示將兩個部件A與長結合鍵結合,完成左前以及左後方支架底座的固定(圖三十)
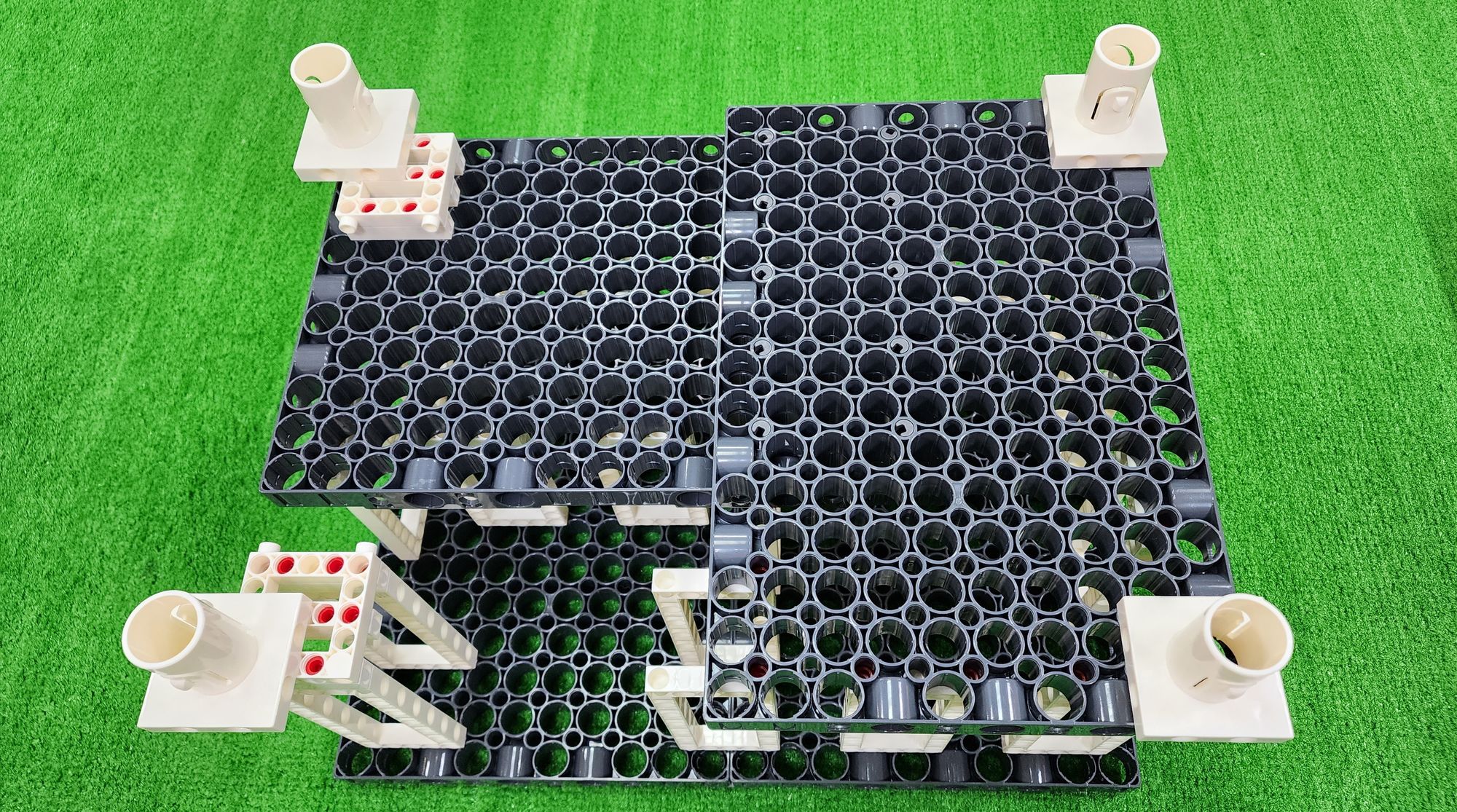
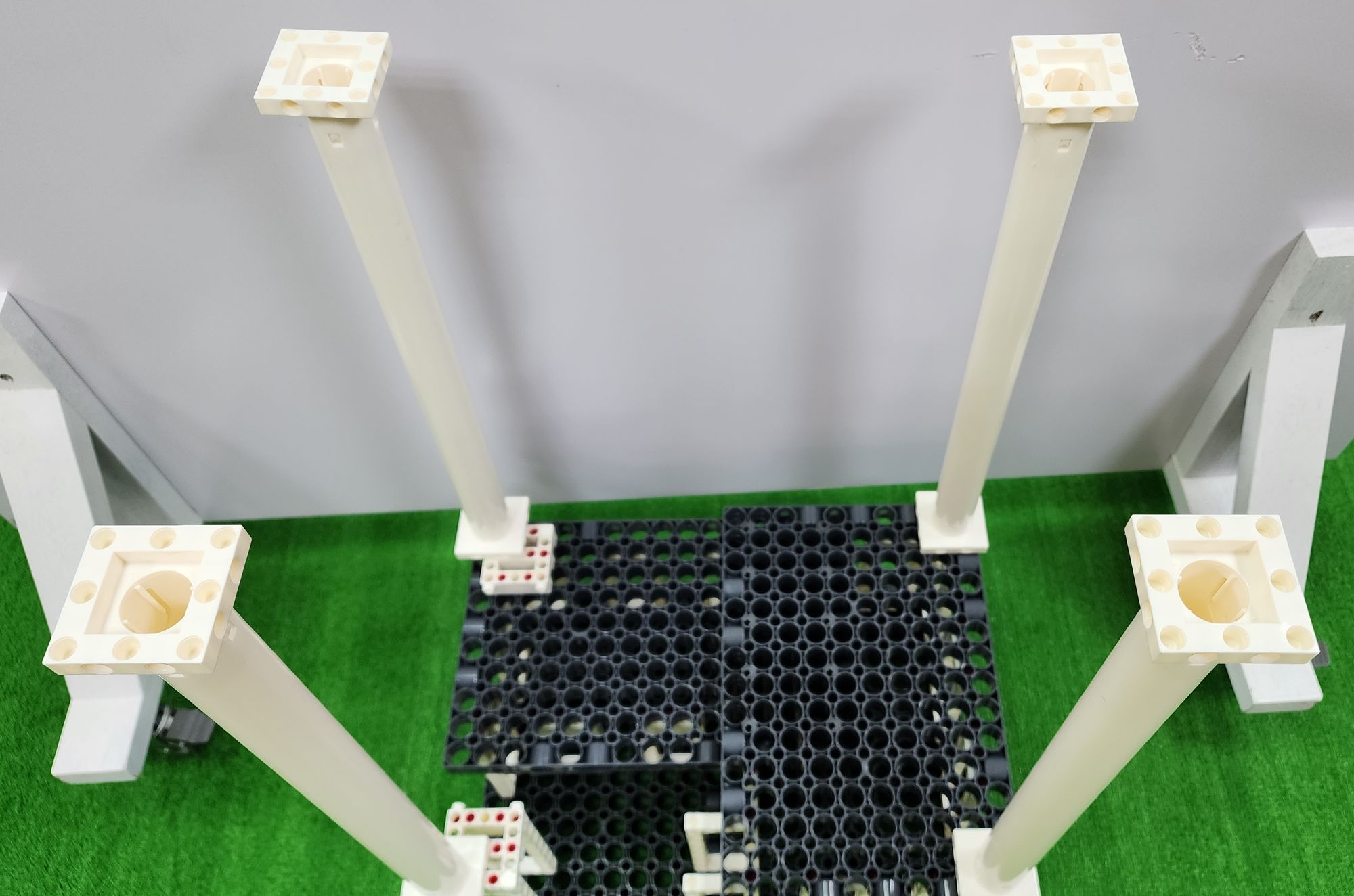
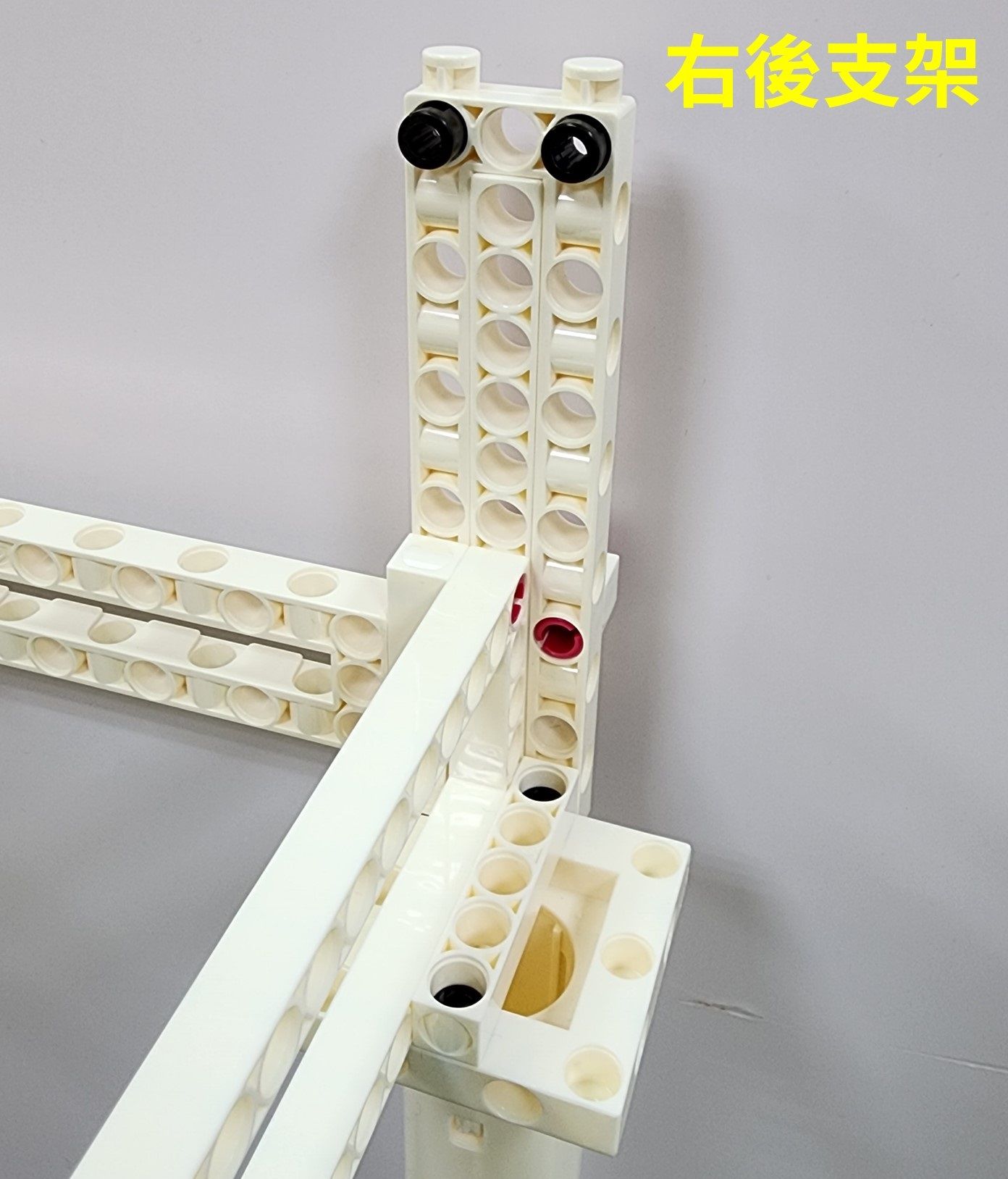
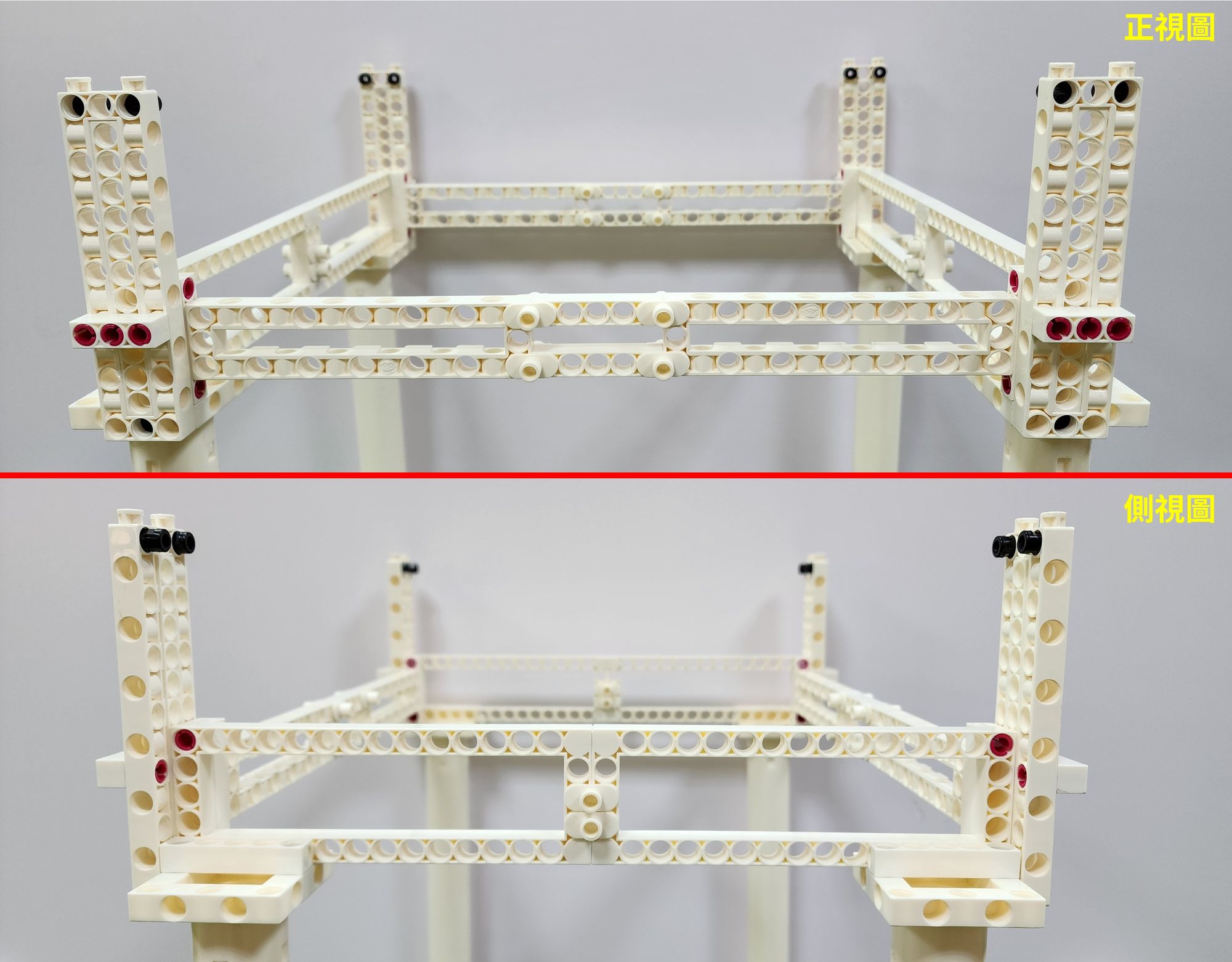
第九步我們要來安裝支架,需要使用到長結合鍵以及短結合鍵(圖三一),將它們依照圖示安裝在夾娃娃機的四個角落(圖三二)。

支架的部分需要使用管轉接器(圖三三),首先將管轉接器分別安裝在夾娃娃機的四個角落,與長結合鍵以及短結合鍵結合(圖三四)。

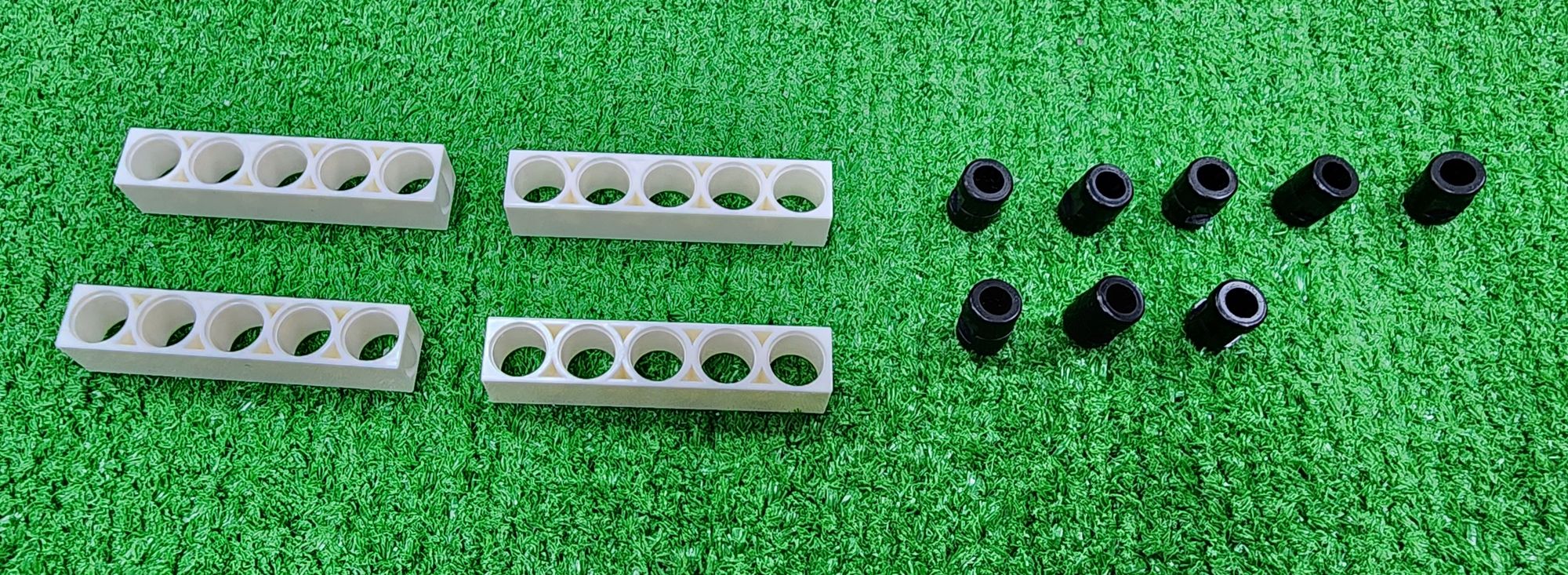
接著要使用到的是410mm管(圖三五),將410mm管和管轉接器結合,延伸支架的長度(圖三六)。

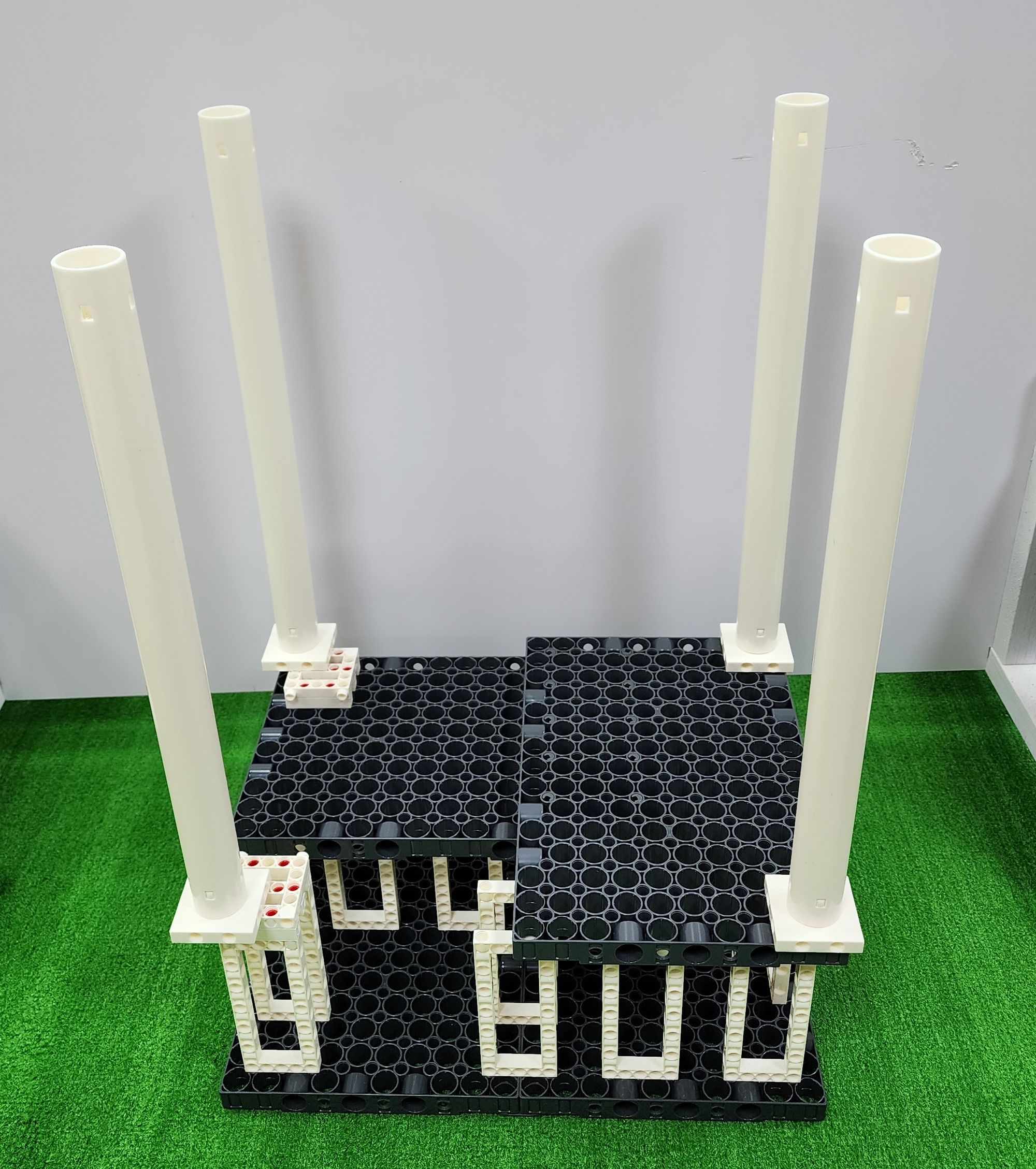
最後同樣要使用管轉接器(圖三七),將管轉接器分別安裝在四根410mm管的上方,完成支架的製作(圖三八)。

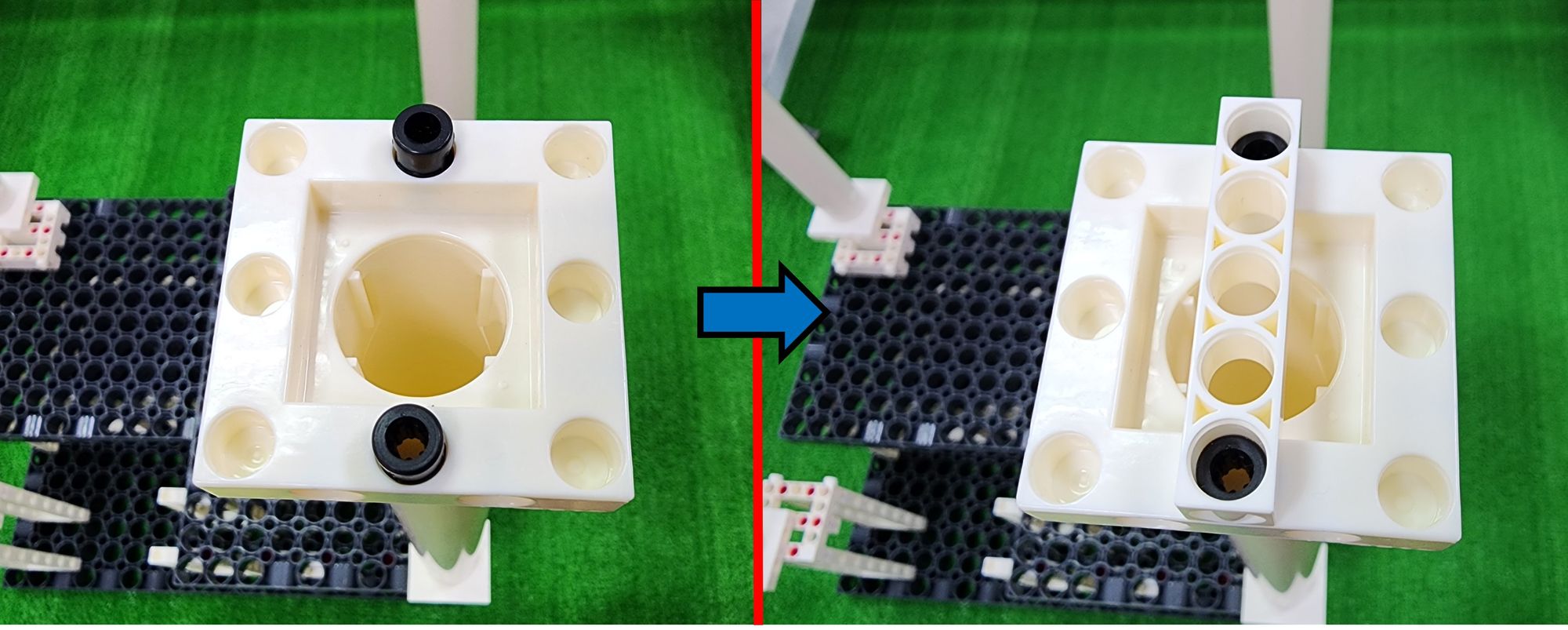
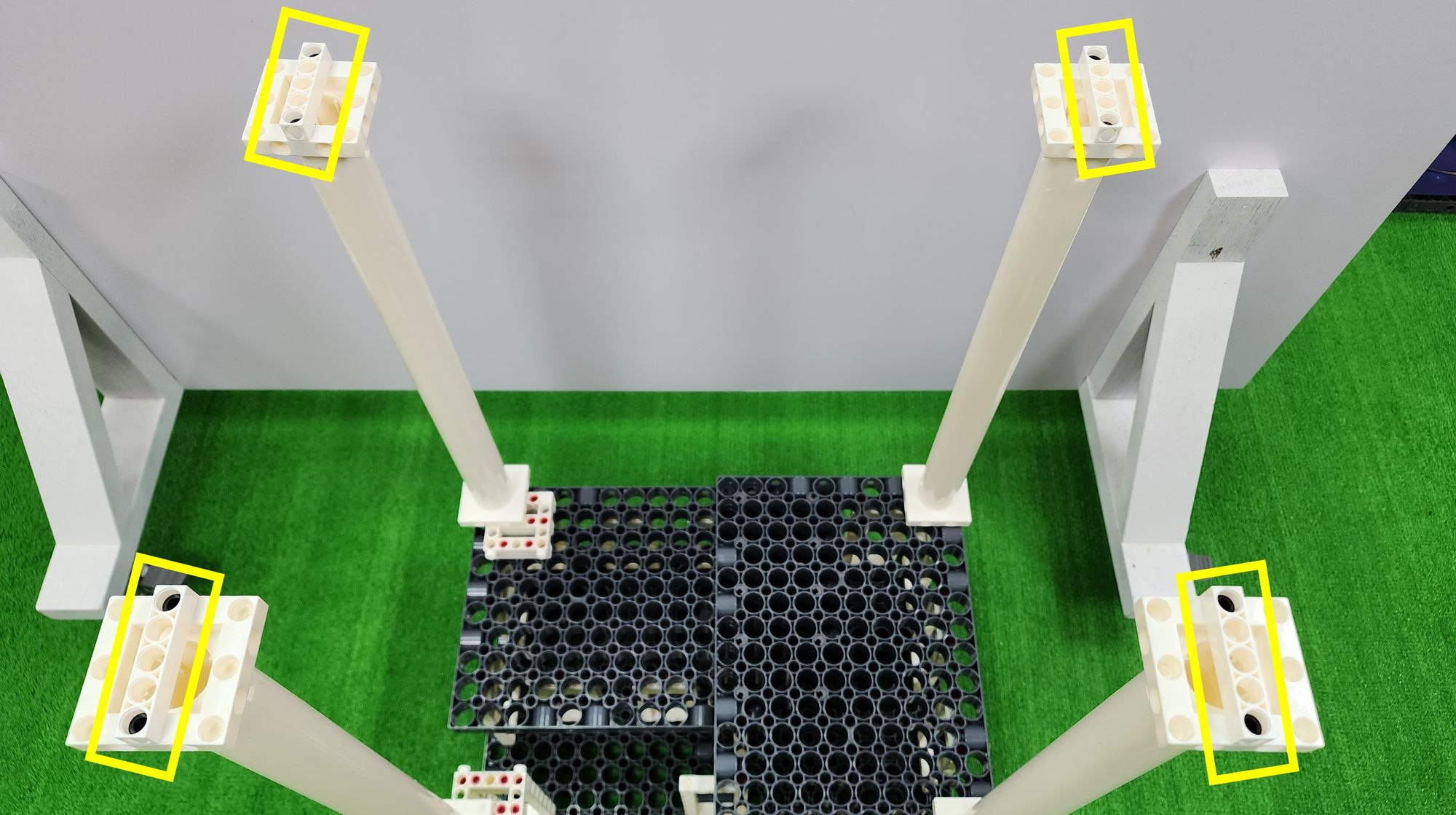
第十步我們要在支架上方加裝些許設計,用於固定軌道,首先需要使用到5孔長條以及短結合鍵(圖三九),將它們依照圖示結合在管轉接器的上方(圖四十、圖四一)。
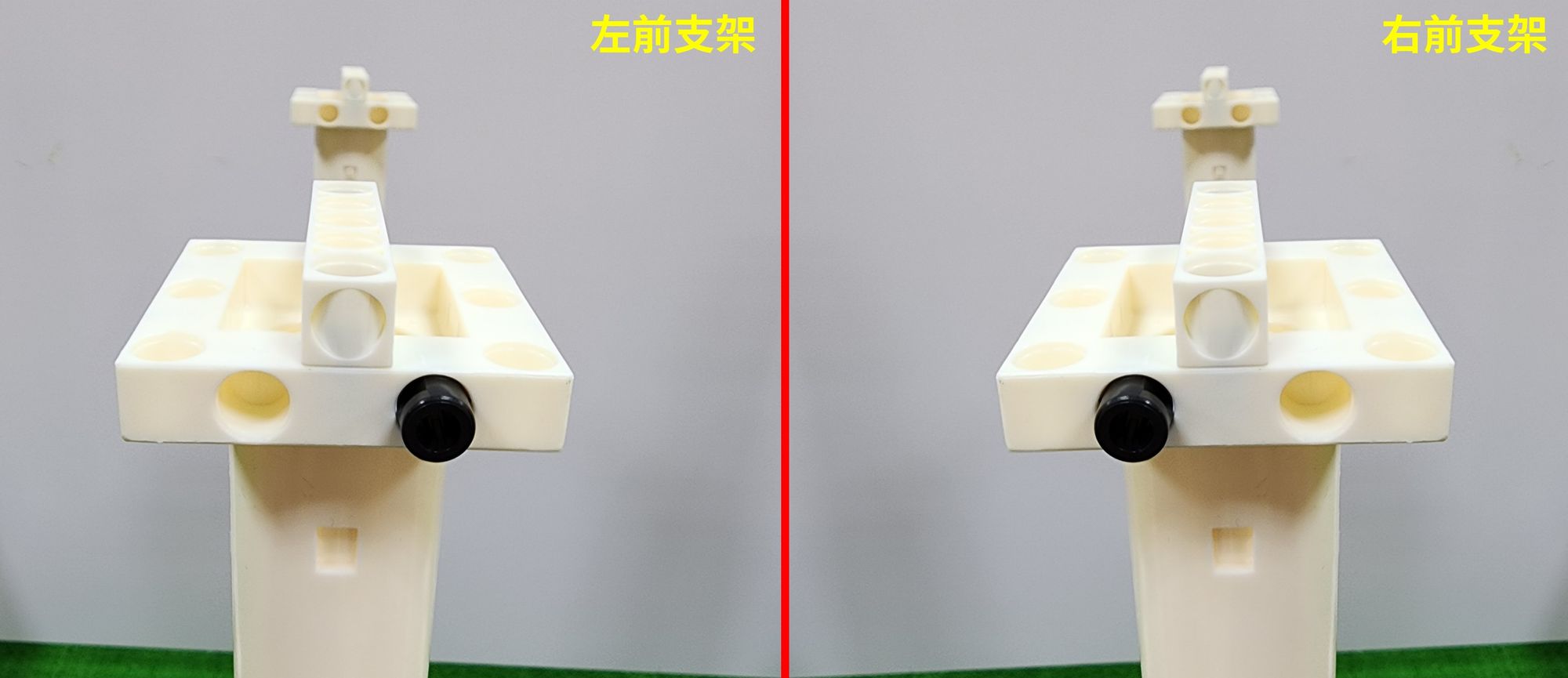
接著要使用到的是3x13孔超長方框(7406-W10-A1W)以及短結合鍵(圖四二)。
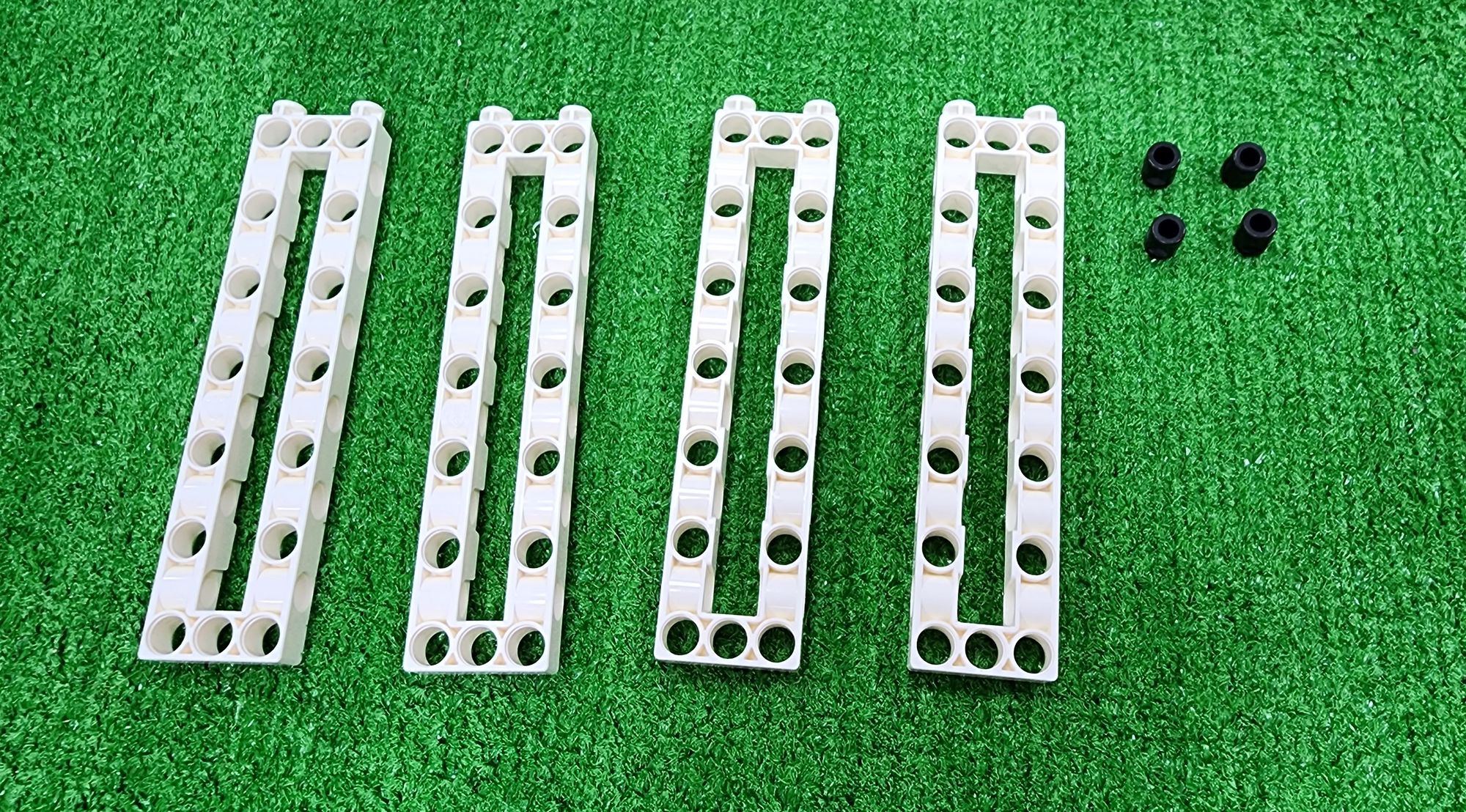
首先將短結合鍵和3x13孔超長方框安裝在管轉接器上,這邊要注意的是短結合鍵的位置,左前方支架上的短結合鍵位置需要靠右;而右前方支架上的短結合鍵位置則需要靠左,兩邊的位置靠近中線內側且互為對稱(圖四三),在確認短結合鍵的位置無誤後,便能安裝3x13孔超長方框(圖四四)。
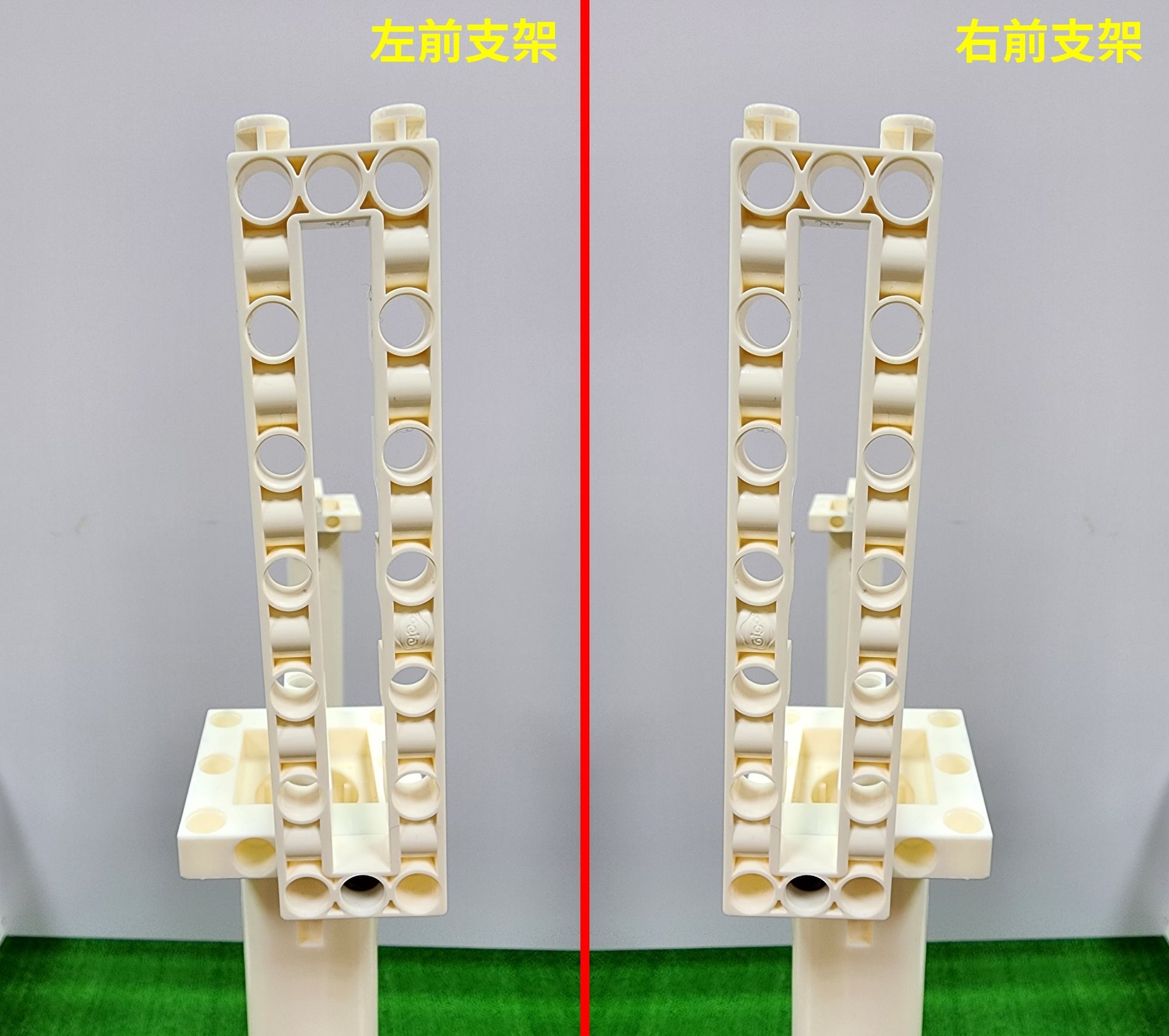
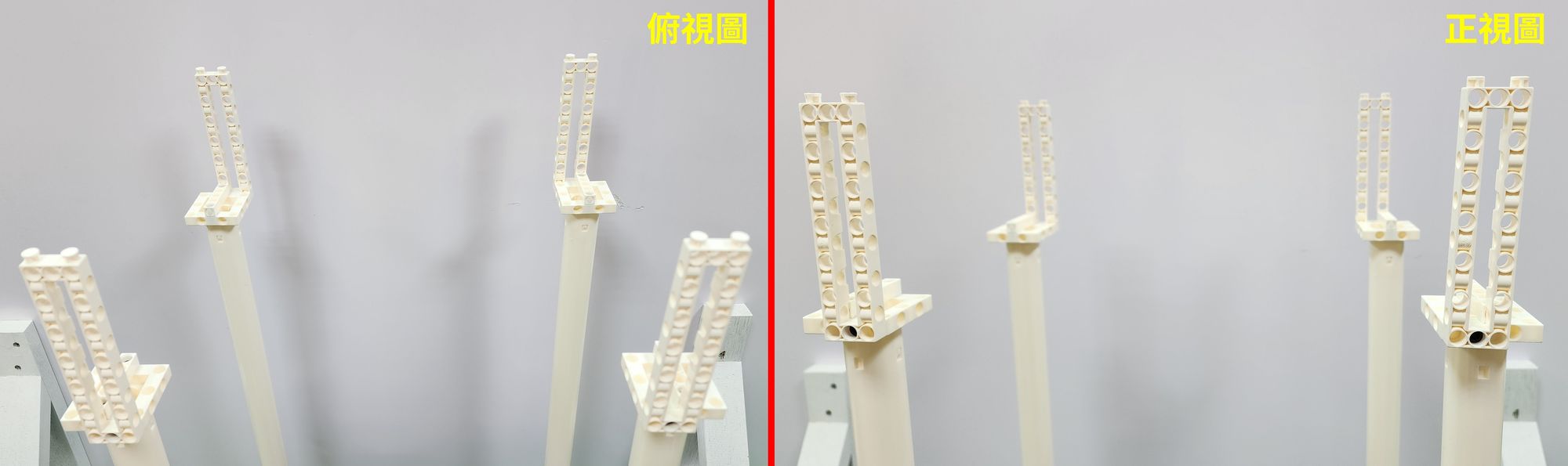
當我們完成所有3x13孔超長方框的安裝後,可以重新檢查一下它們的位置,特別是位於左後方與右後方的3x13孔超長方框,同樣是靠近中線內側,並安裝在夾娃娃機的最後方(圖四五)。
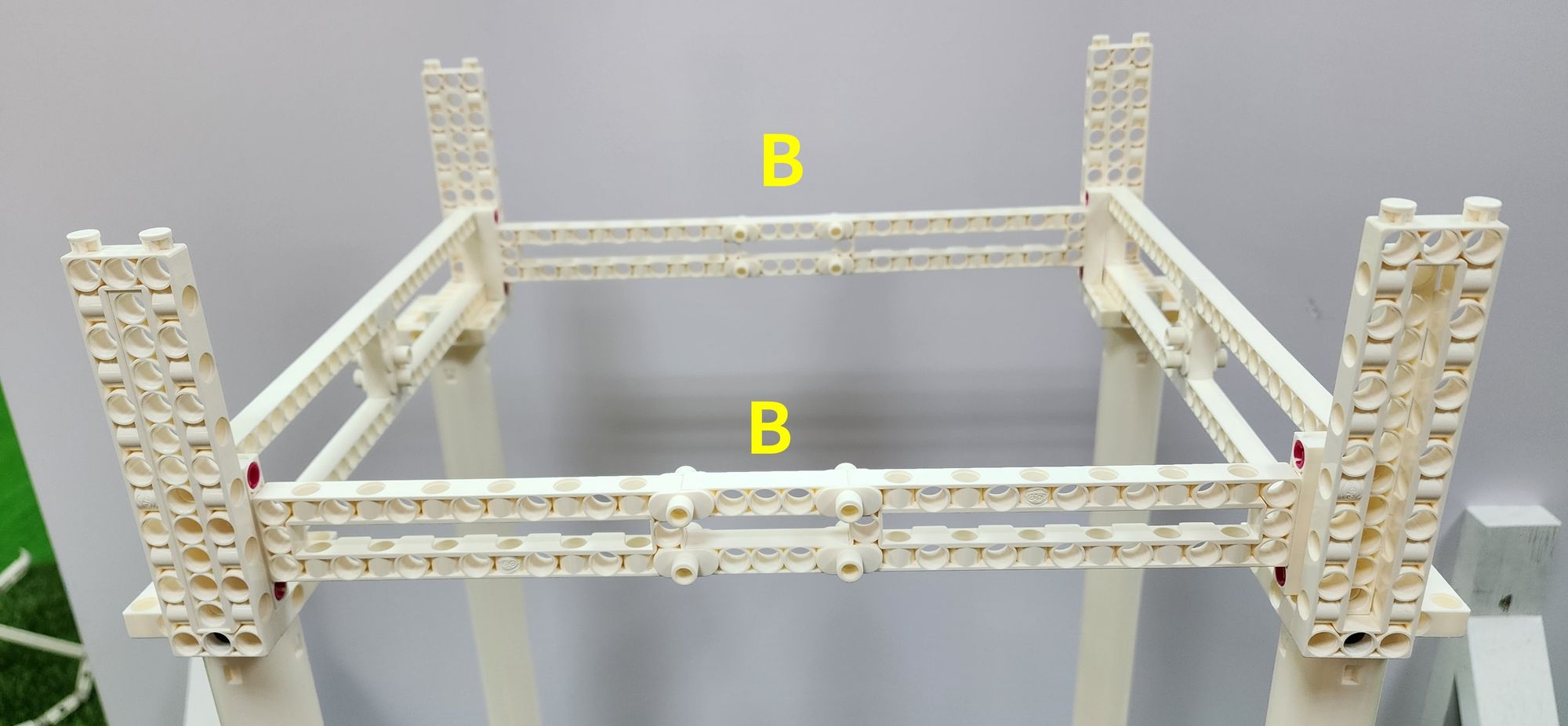
現在我們要來製做橫桿以及前後軌道,橫桿(部件B)可以用來固定夾娃娃機的支架,讓夾娃娃機的結構更加穩固,前後軌道(部件C)上方可以放置天車,讓它以前後的方向進行移動。
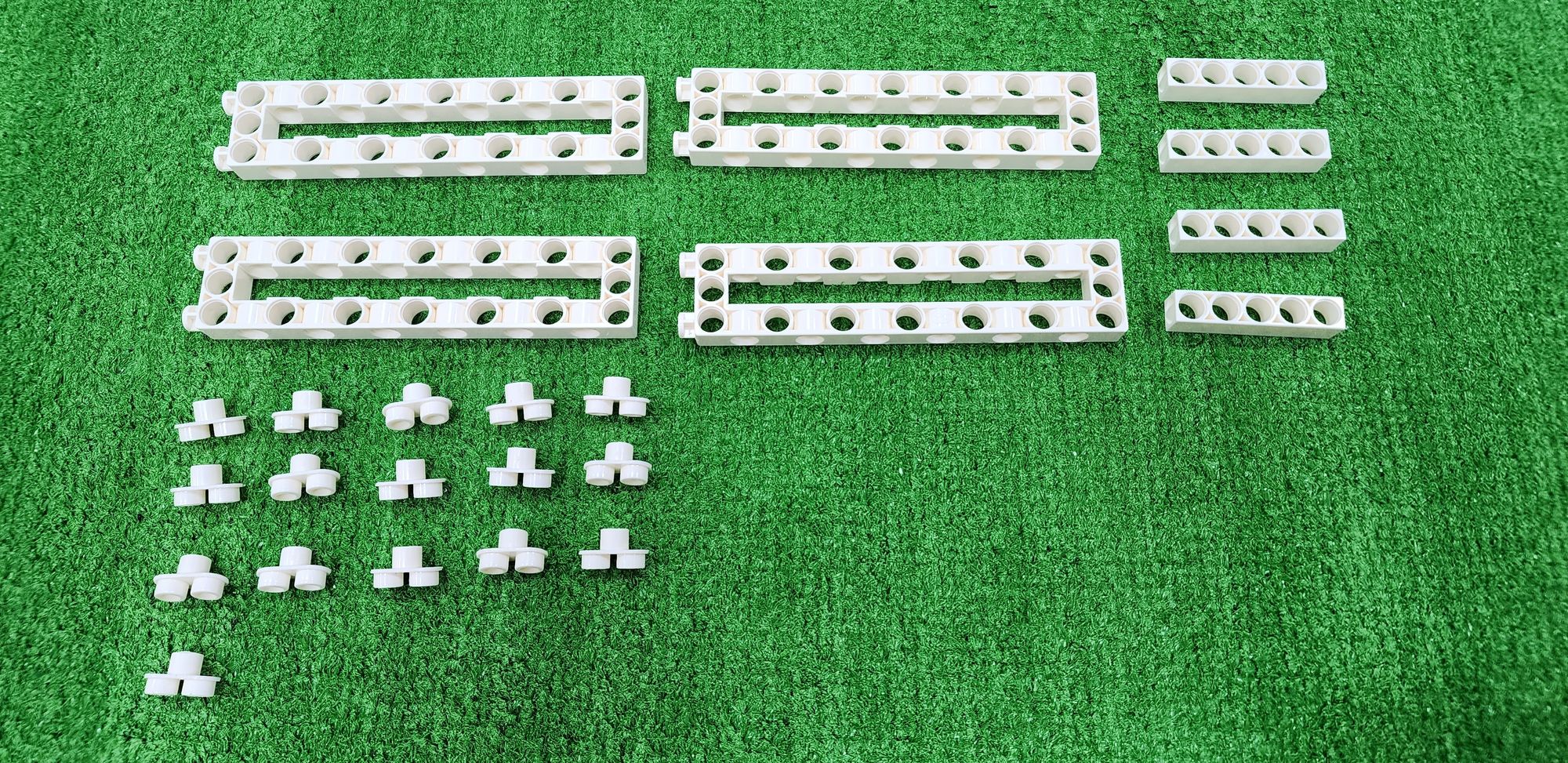
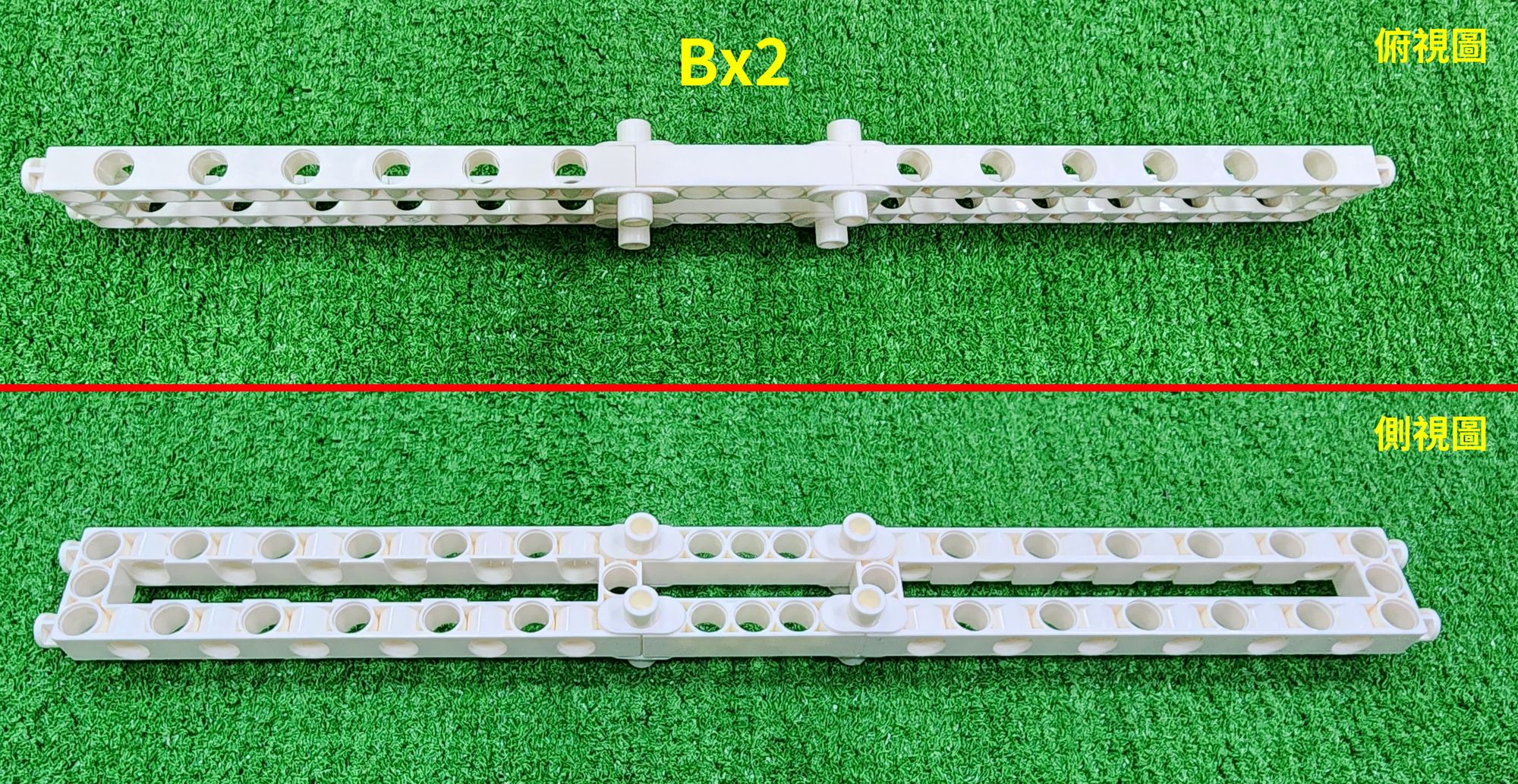
首先第十一步要製做的是橫桿,需要使用到3x13孔超長方框、5孔長條以及二合一結合鍵(圖四六),將它們依照圖示結合在一起,完成兩個部件B的製作(圖四七)。
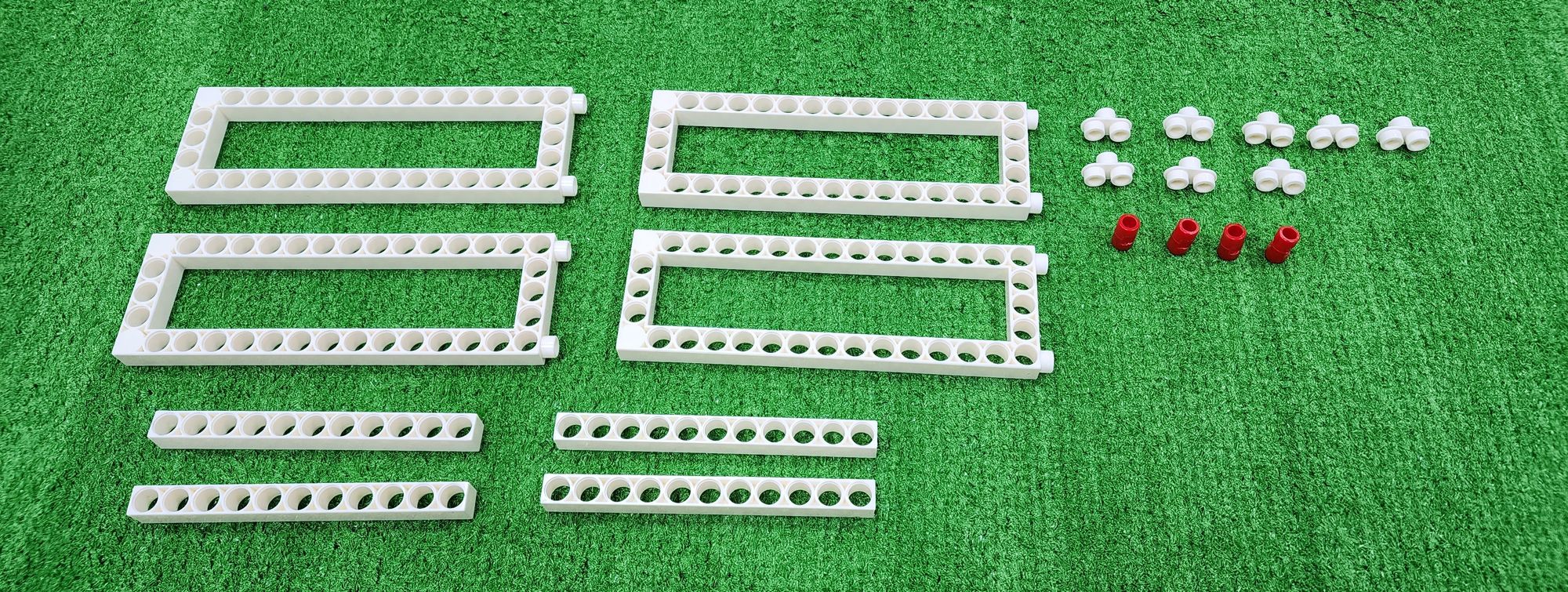
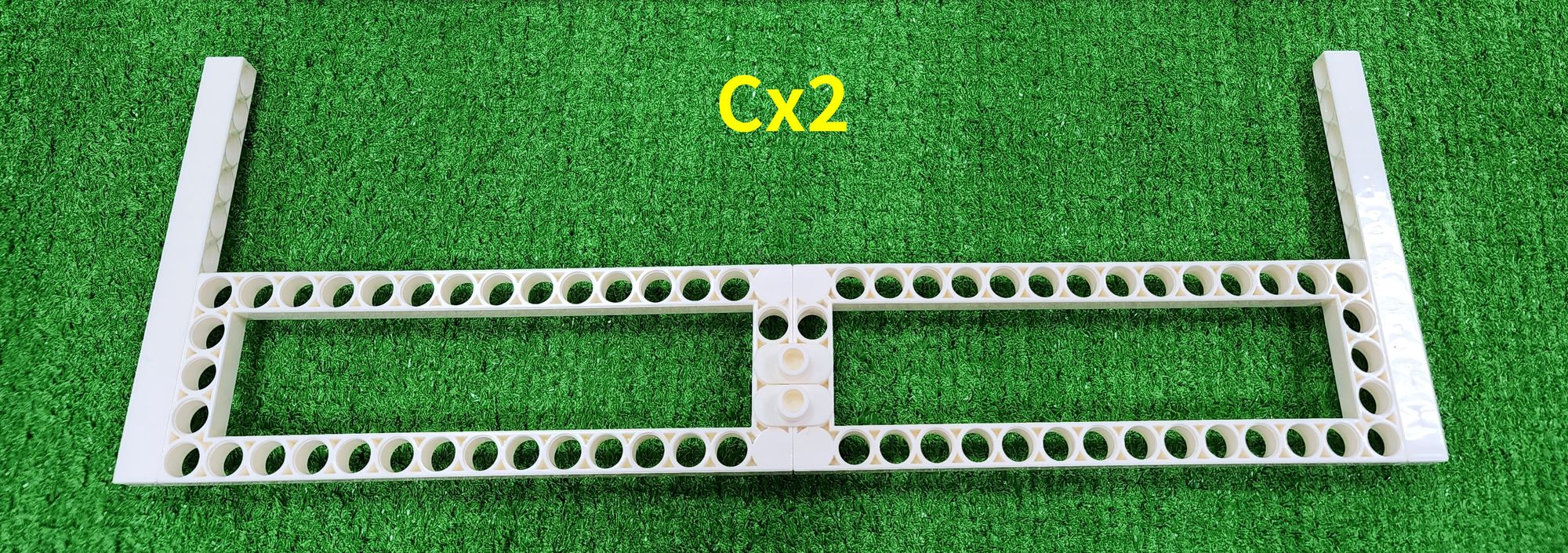
接著要製做的是前後軌道,需要使用到5×15孔長方框、11孔長條、二合一結合鍵以及長結合鍵(圖四八),將它們依照圖示結合在一起,完成兩個部件C的製作(圖四九)。
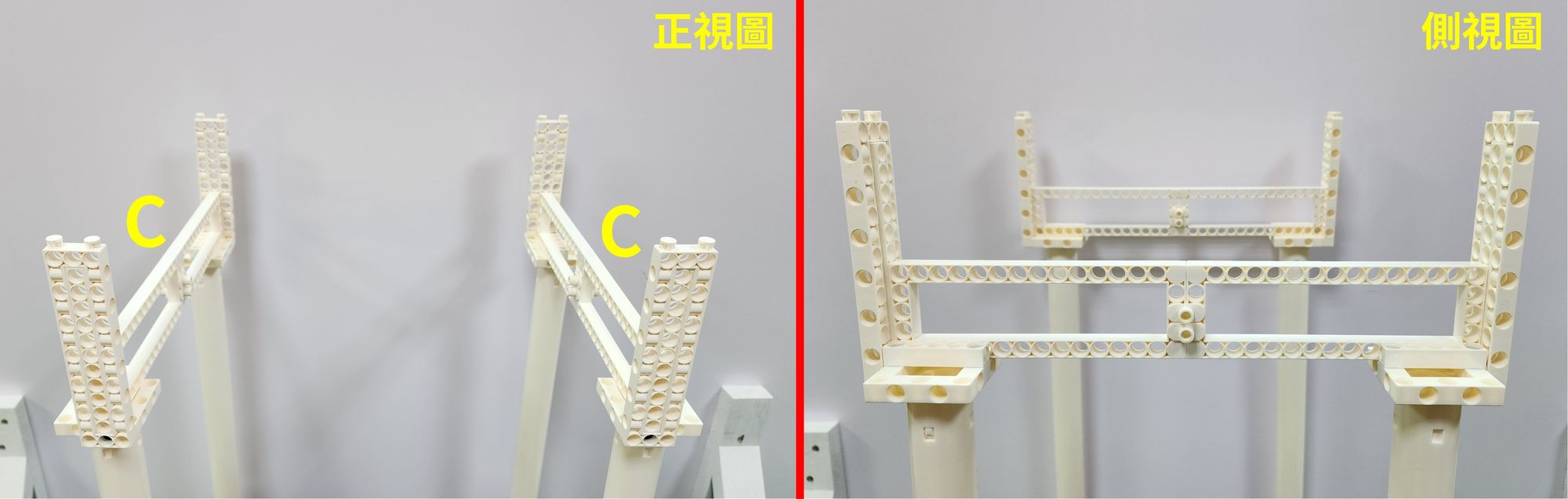
第十二步我們要將前後軌道固定在支架上,將部件C的兩端放入前、後方3x13孔超長方框中間的孔洞(圖五十),依照此方法完成兩個部件C的安裝(圖五一)。
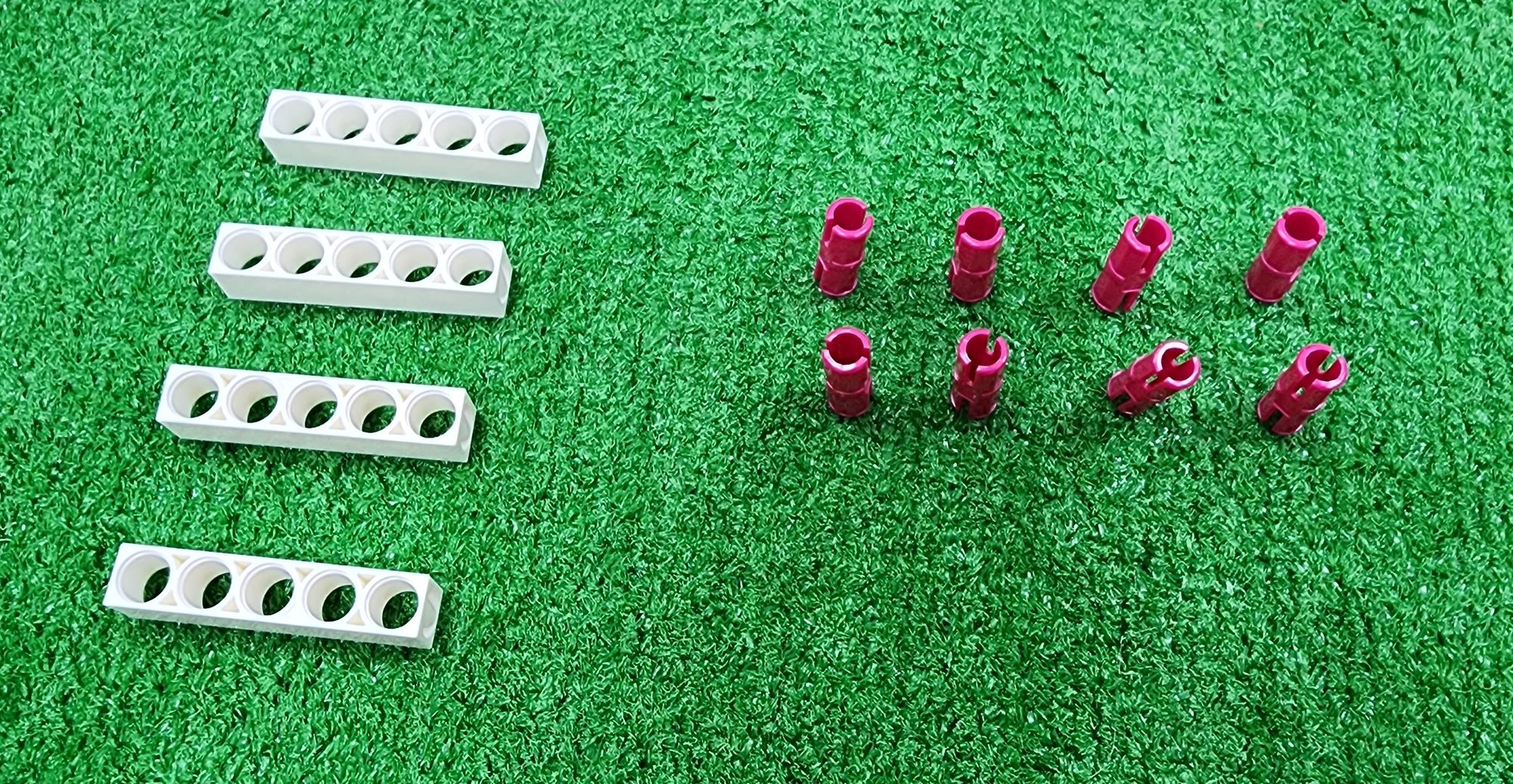
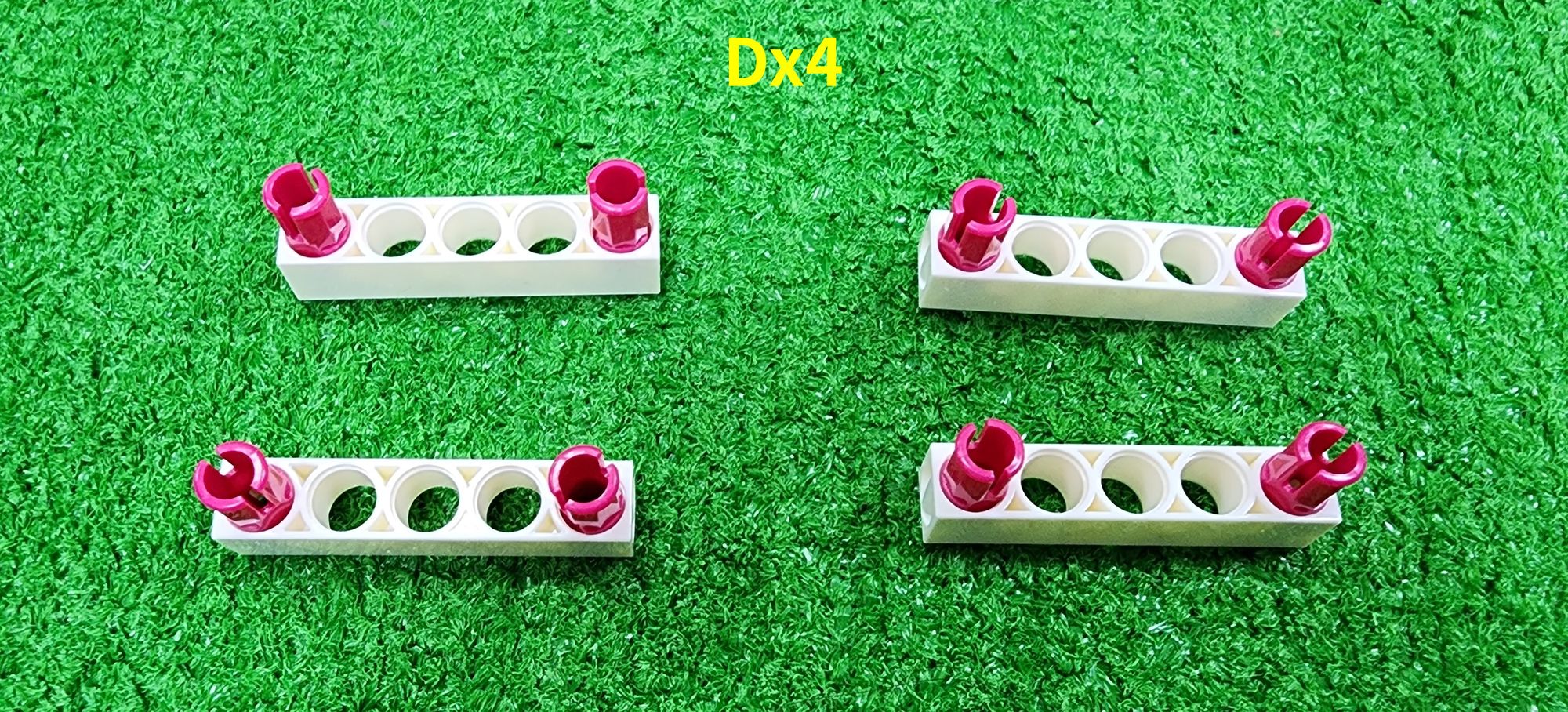
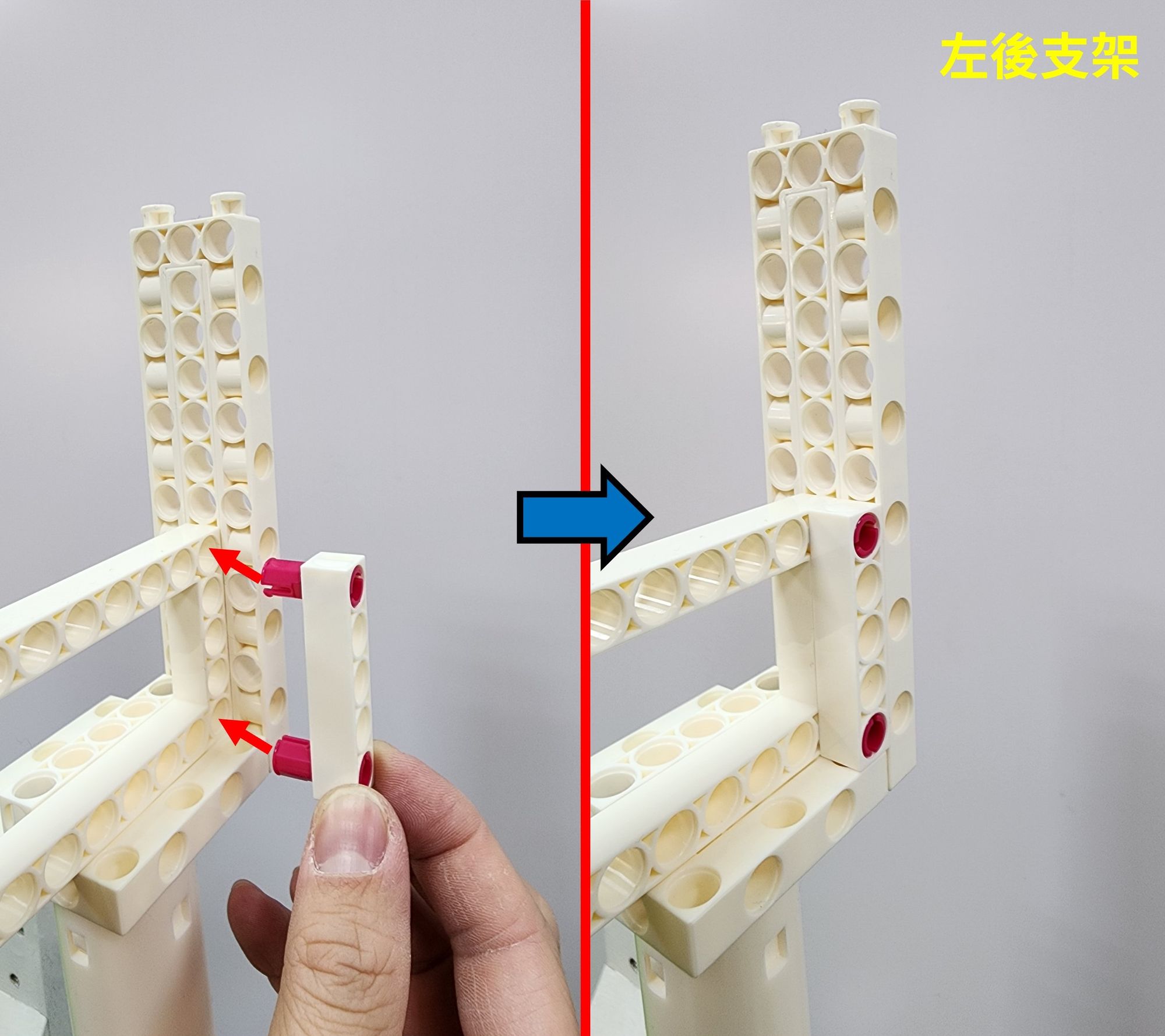
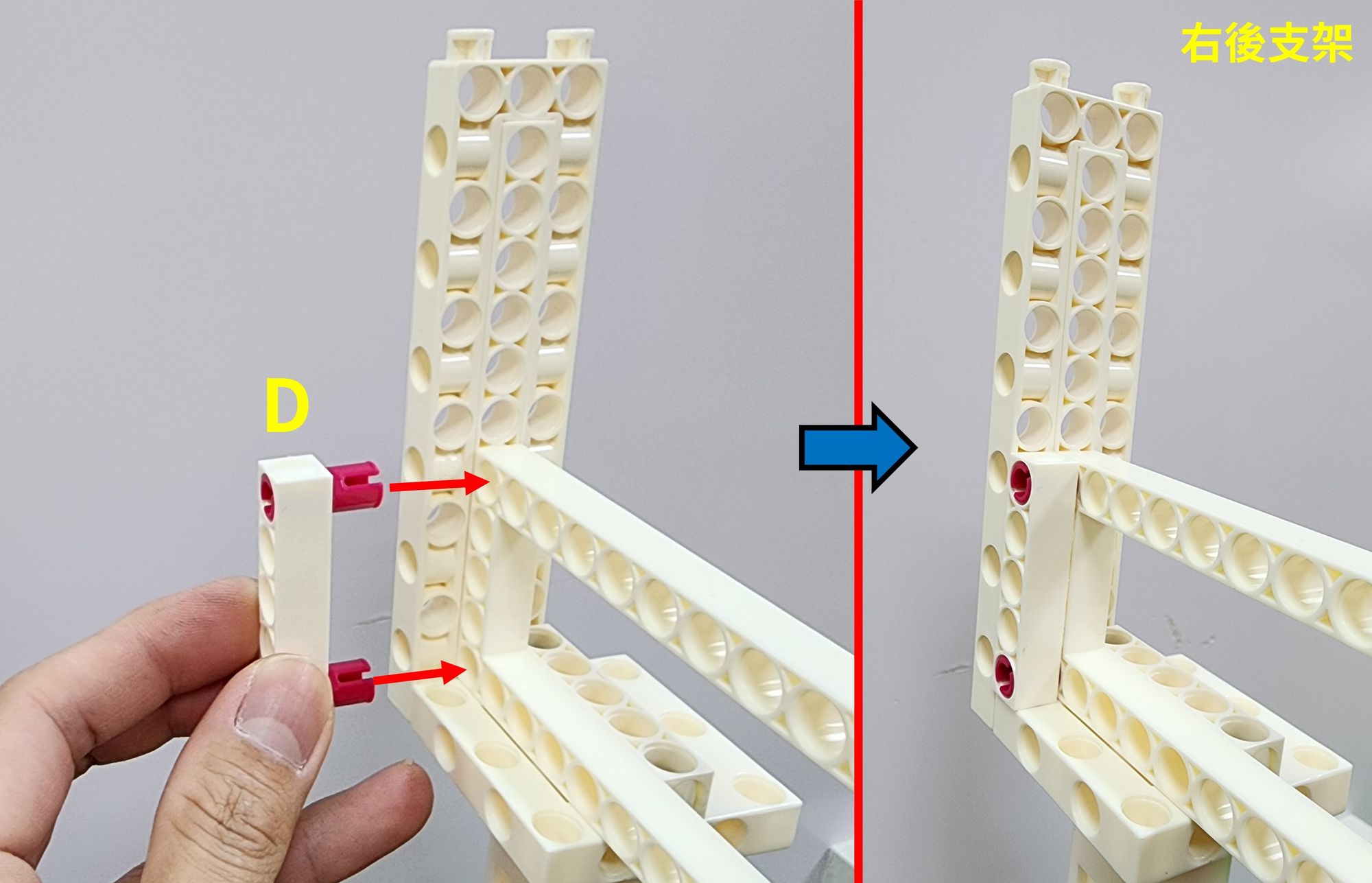
第十三步我們要在部件C上方加裝些許設計,用於連接部件B,需要使用到5孔長條以及栓扣键(1187-W10-E1K)(圖五二),將它們依照圖示結合在一起,完成四個部件D的製作(圖五三)。
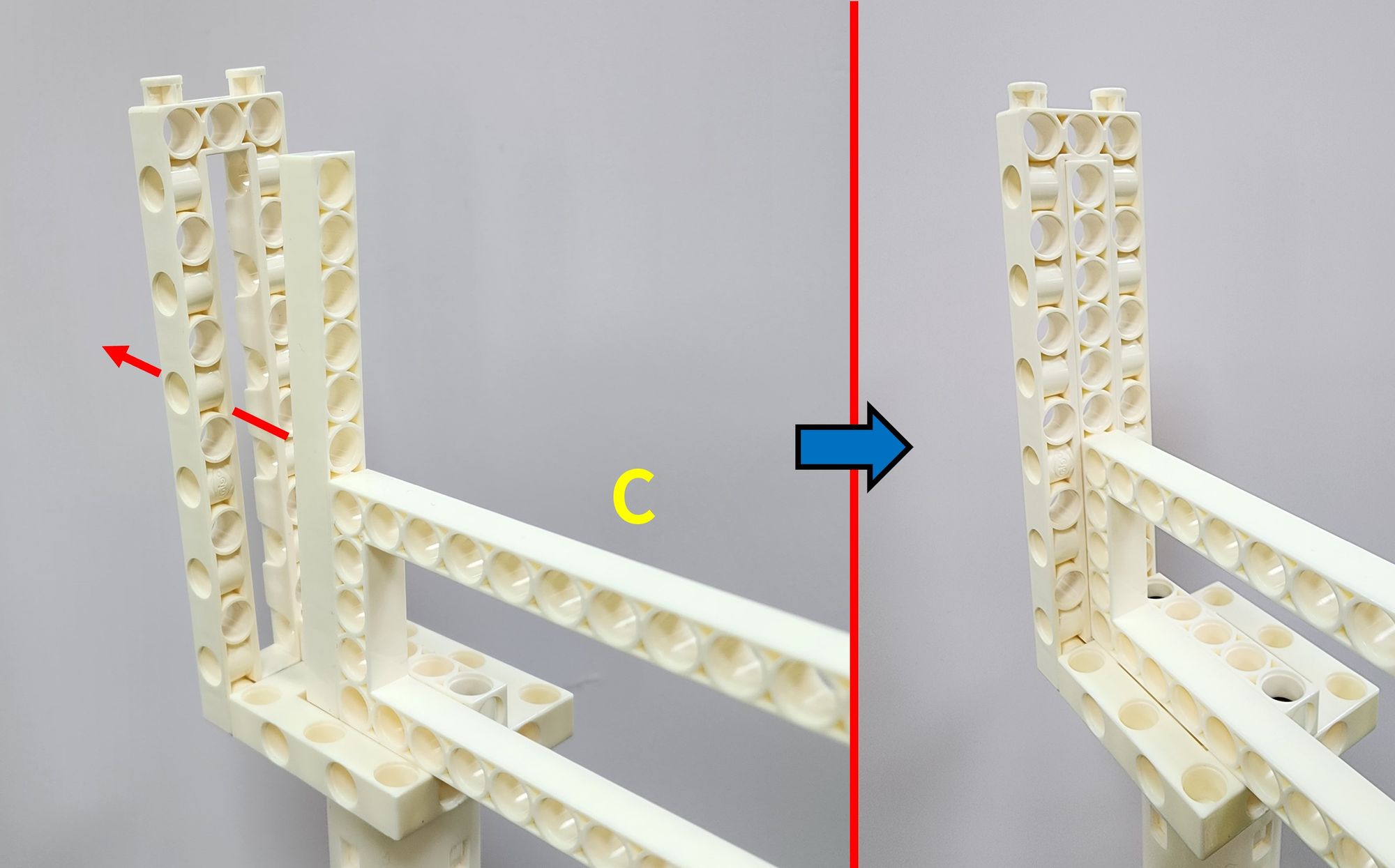
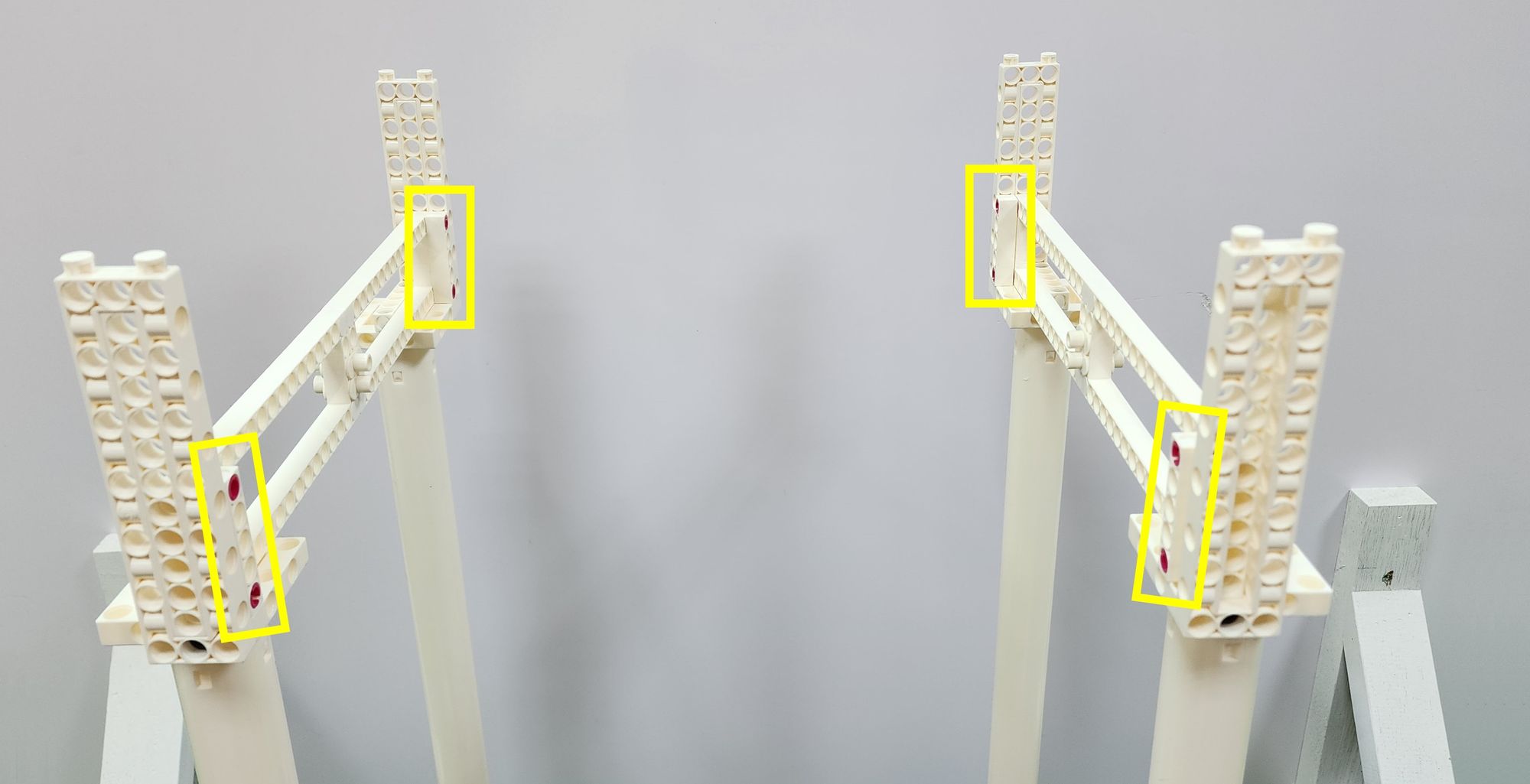
接著依照圖示將完成後的部件D安裝在部件C上(圖五四、圖五五),完成後同樣需要檢查看看,部件D是否正確安裝在左、右兩組部件C的內側(圖五六)。
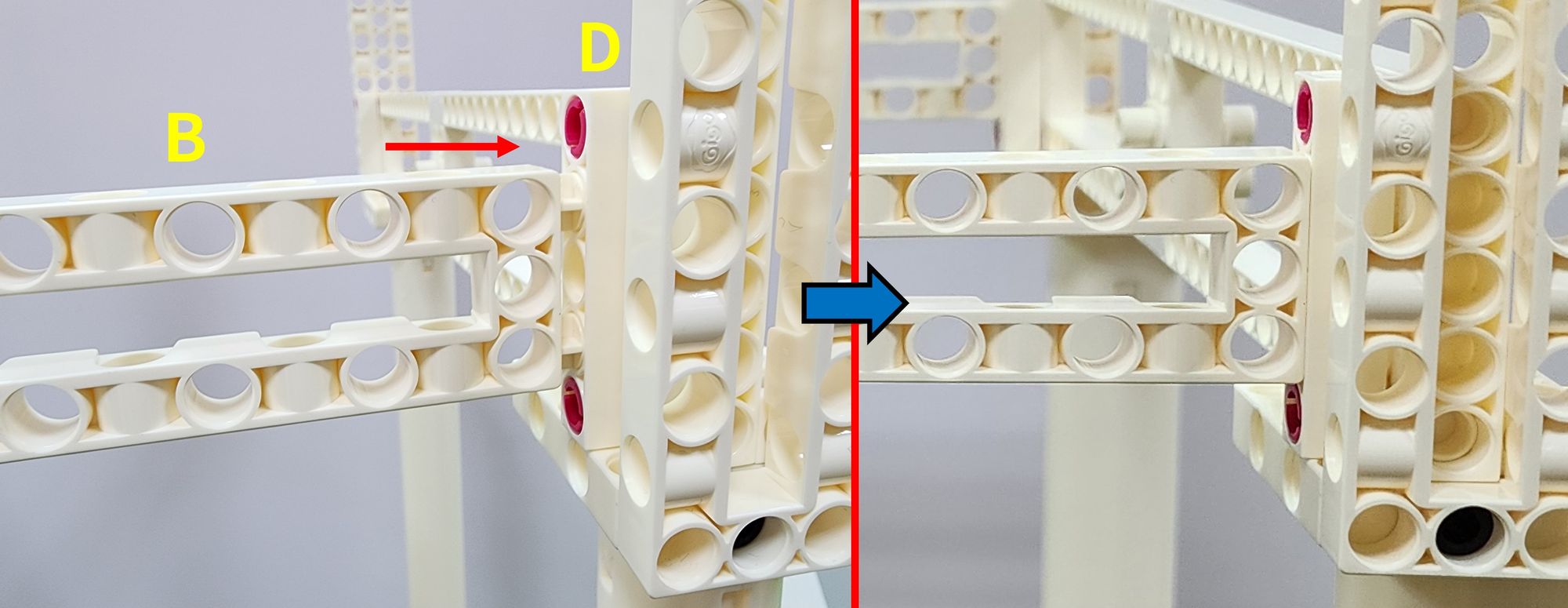
第十四步我們要來安裝橫桿,將剛剛完成的部件B與左、右兩側的部件D結合(圖五七),如此一來橫桿、支架與前後軌道就可以連接在一起了(圖五八)。
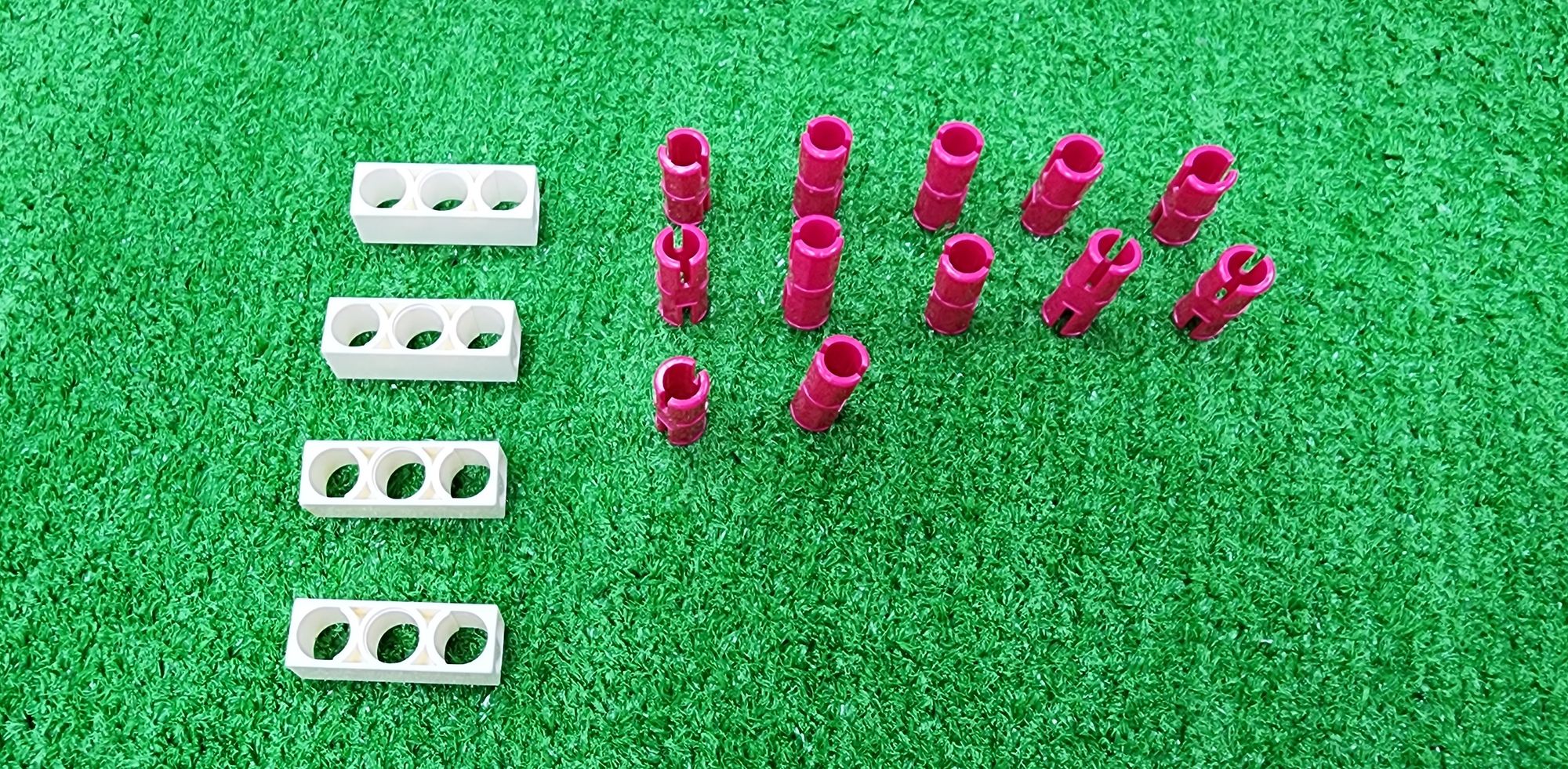
第十五步我們要來加固前後軌道,需要使用到3孔長條以及栓扣键(圖五九),將它們依照圖示結合在一起,完成四個部件E的製作(圖六十)。

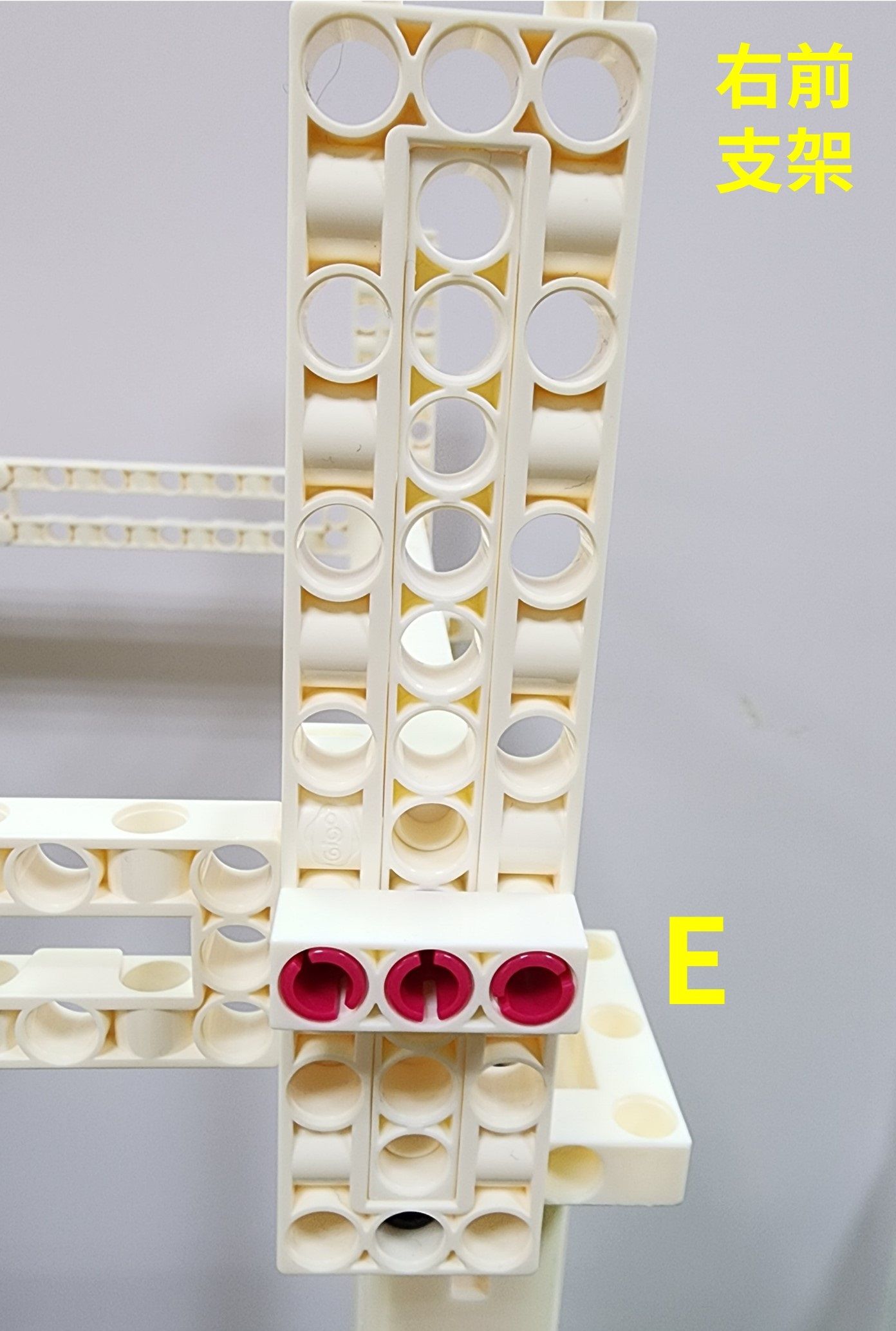
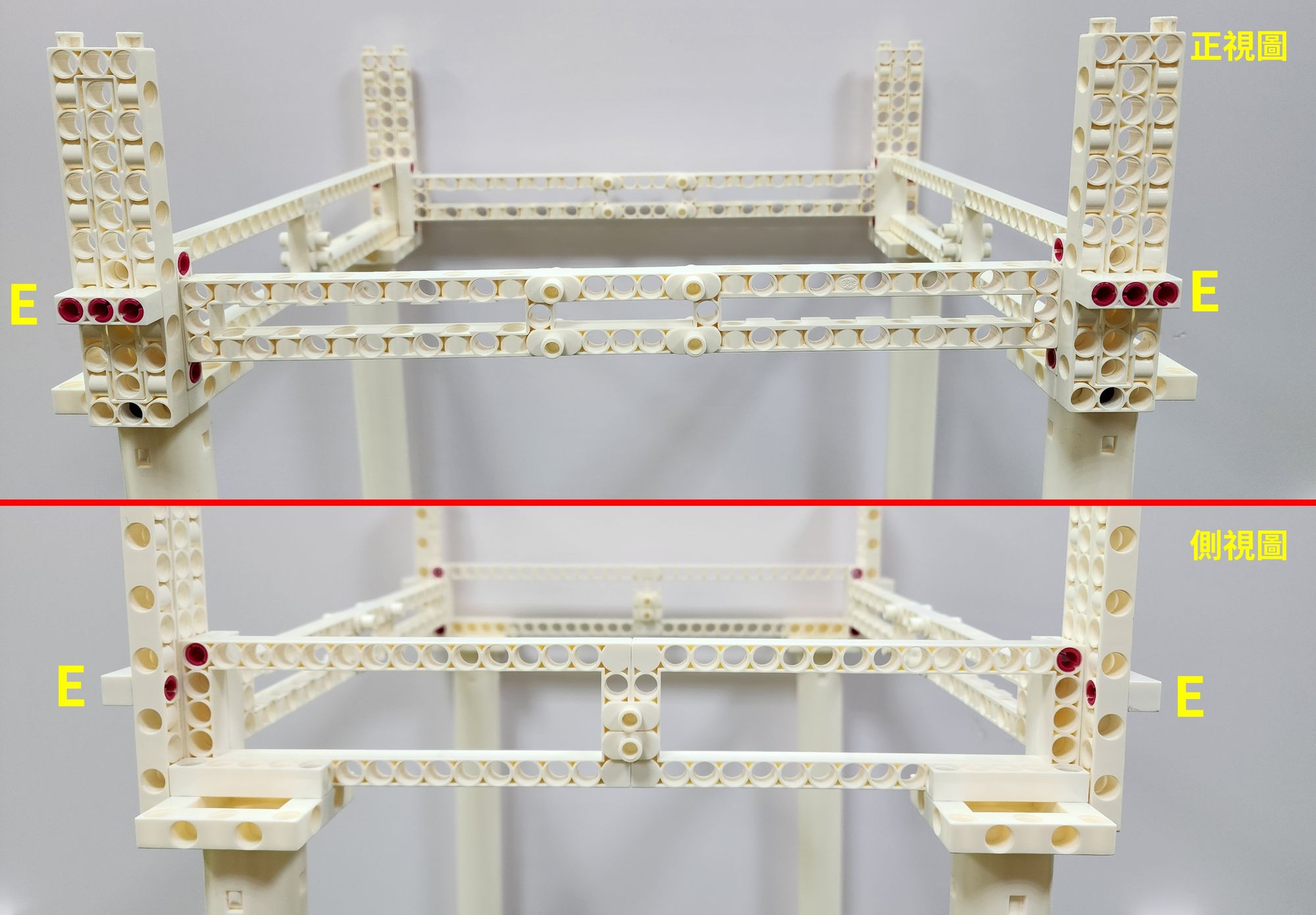
接著依照圖示將完成後的部件E安裝在部件C以及支架上(圖六一),完成後同樣需要檢查看看,四個部件E是否都正確安裝在夾娃娃機的最前方與最後方(圖六二)。
最後我們需要使用短結合鍵(圖六三),將它們依照圖示組裝在支架上的3x13孔超長方框(圖六四)。

完成後同樣需要檢查看看,短結合鍵是否都正確安裝在夾娃娃機的內側(圖六五),此設計是為了擋住軌道上的天車,防止天車移動到邊緣時出軌。
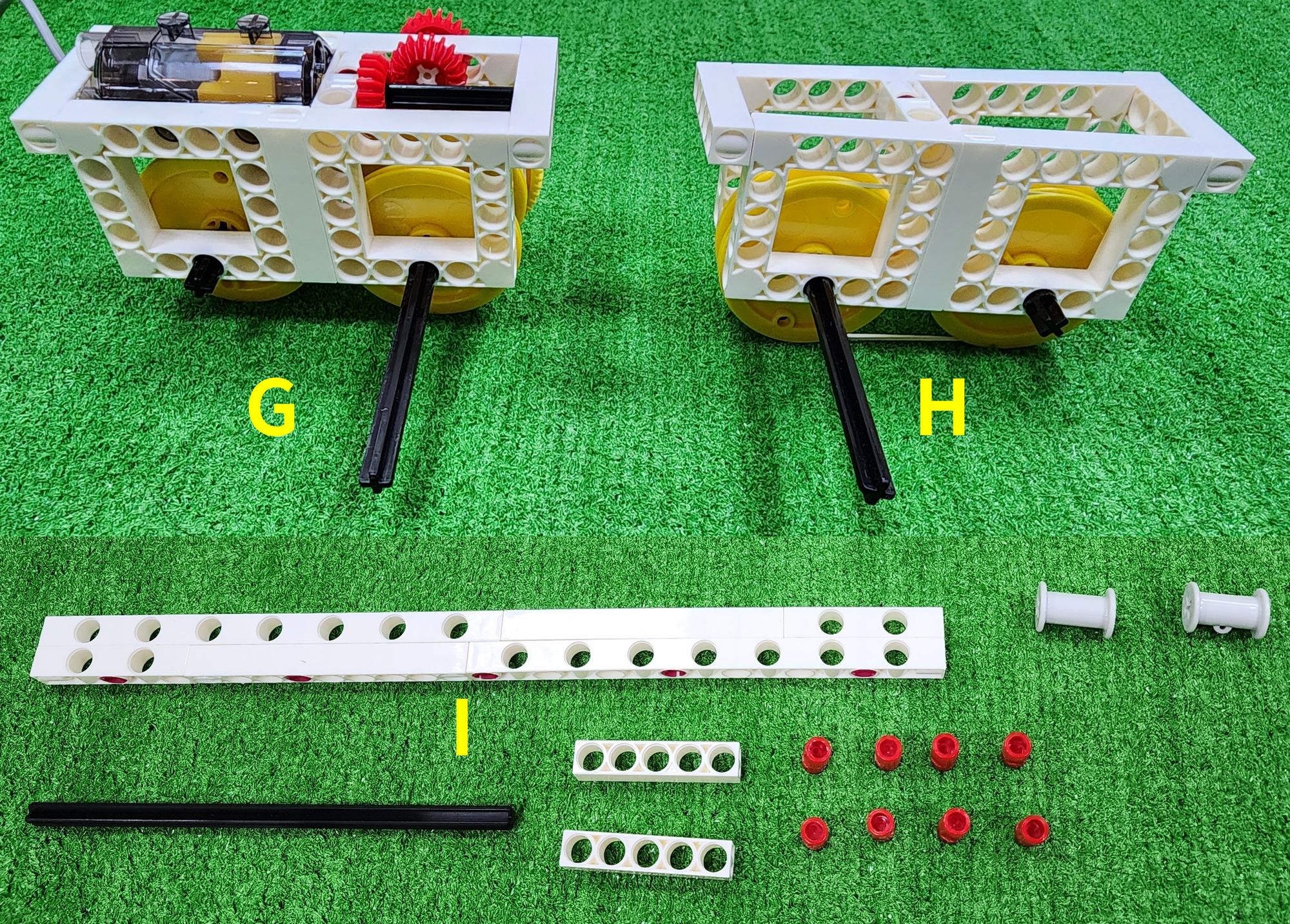
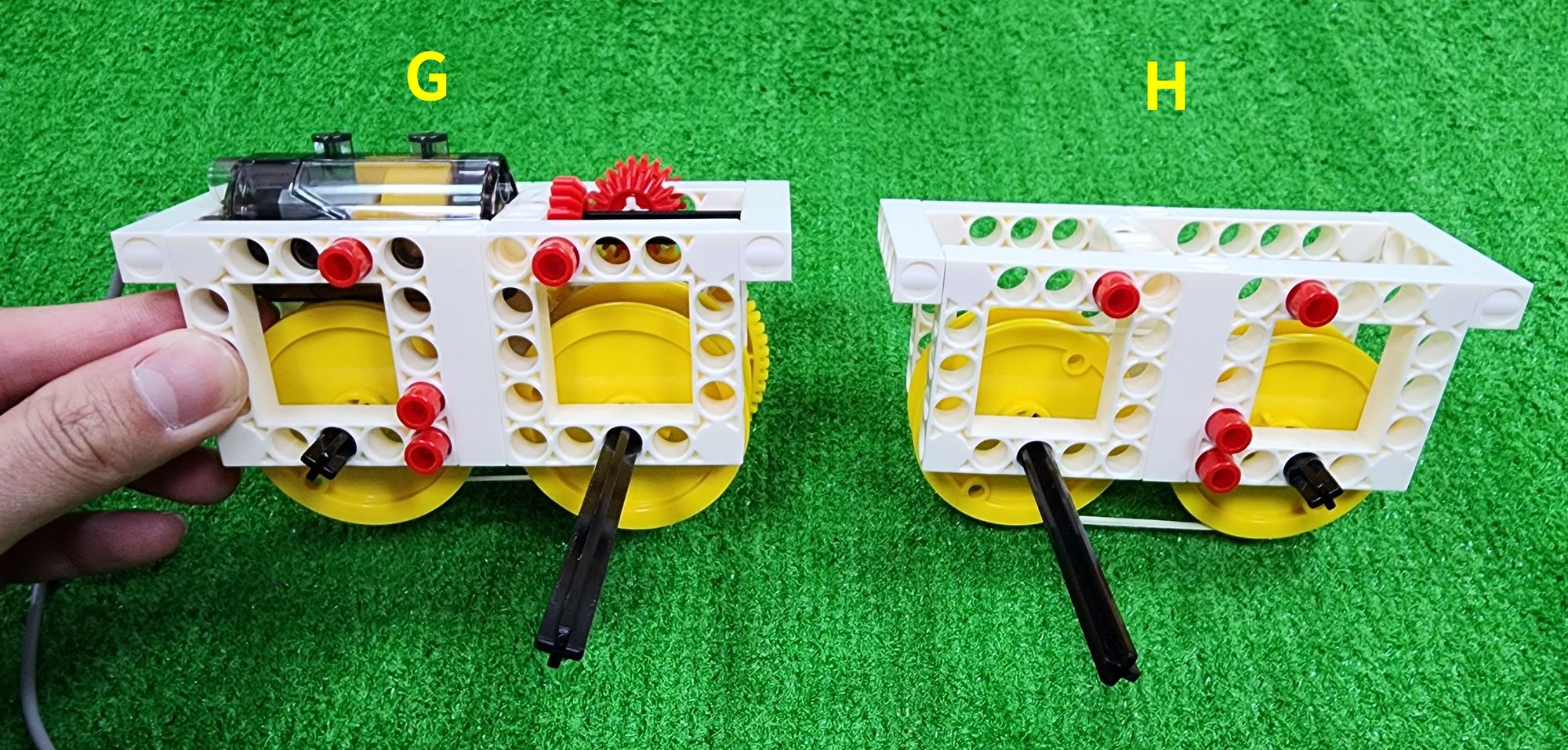
現在我們要來製做夾娃娃機的前後天車,前後天車會在前後軌道上方行走,讓夾娃娃機的夾爪能夠往前後方向移動,主要由部件G、左右軌道(部件I)以及部件H組成。
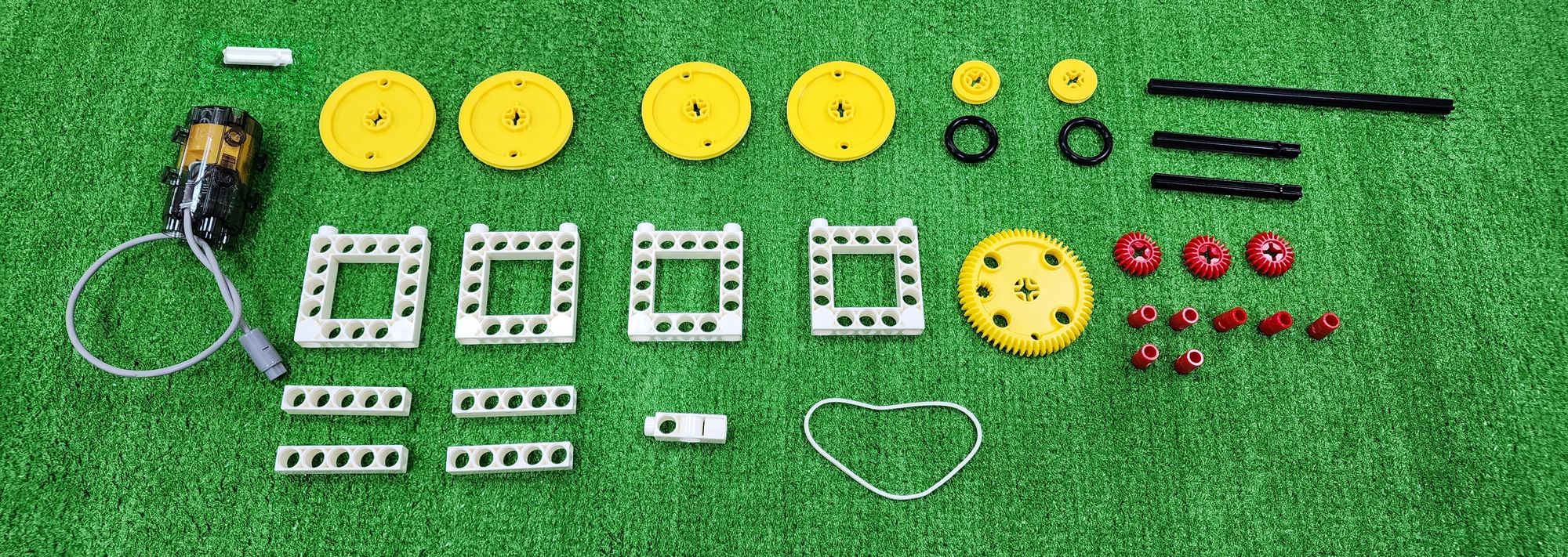
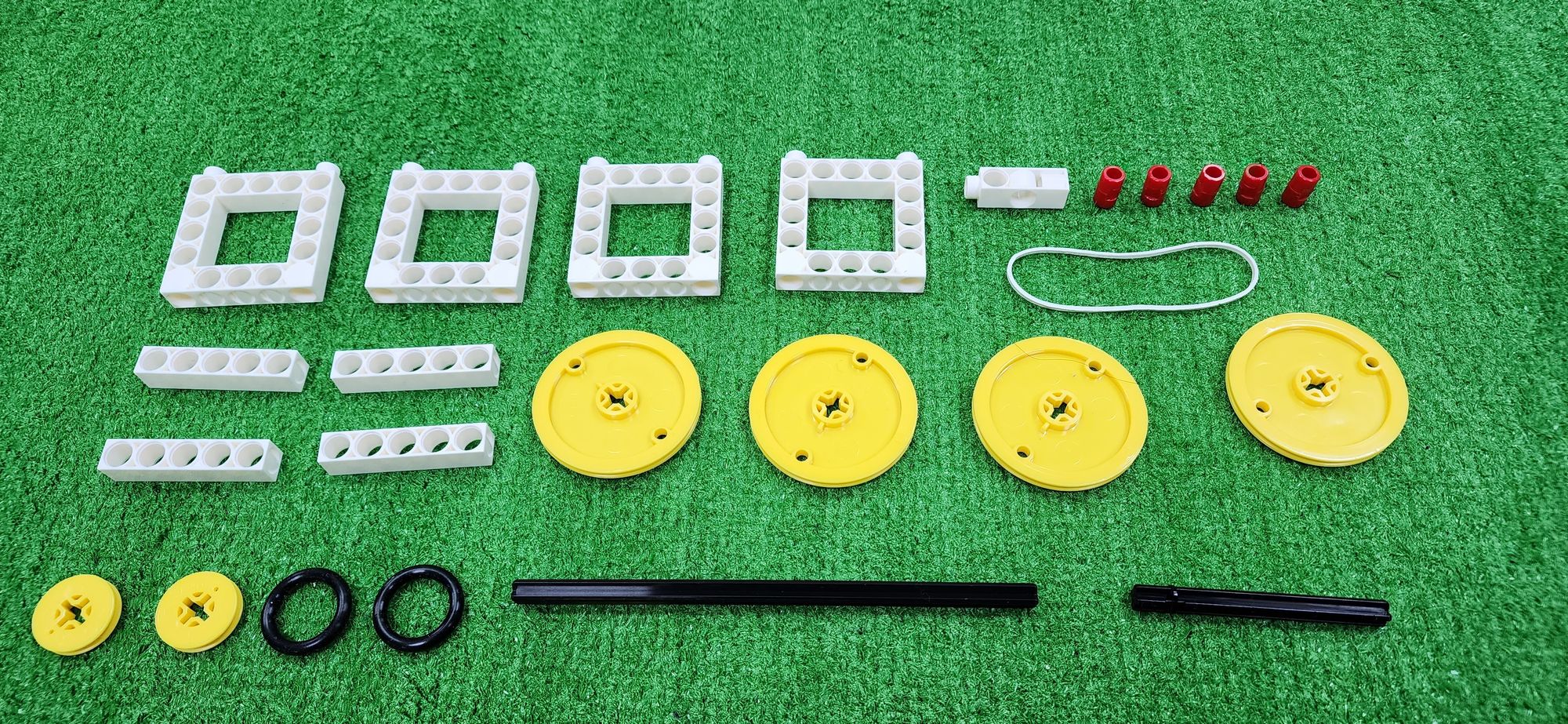
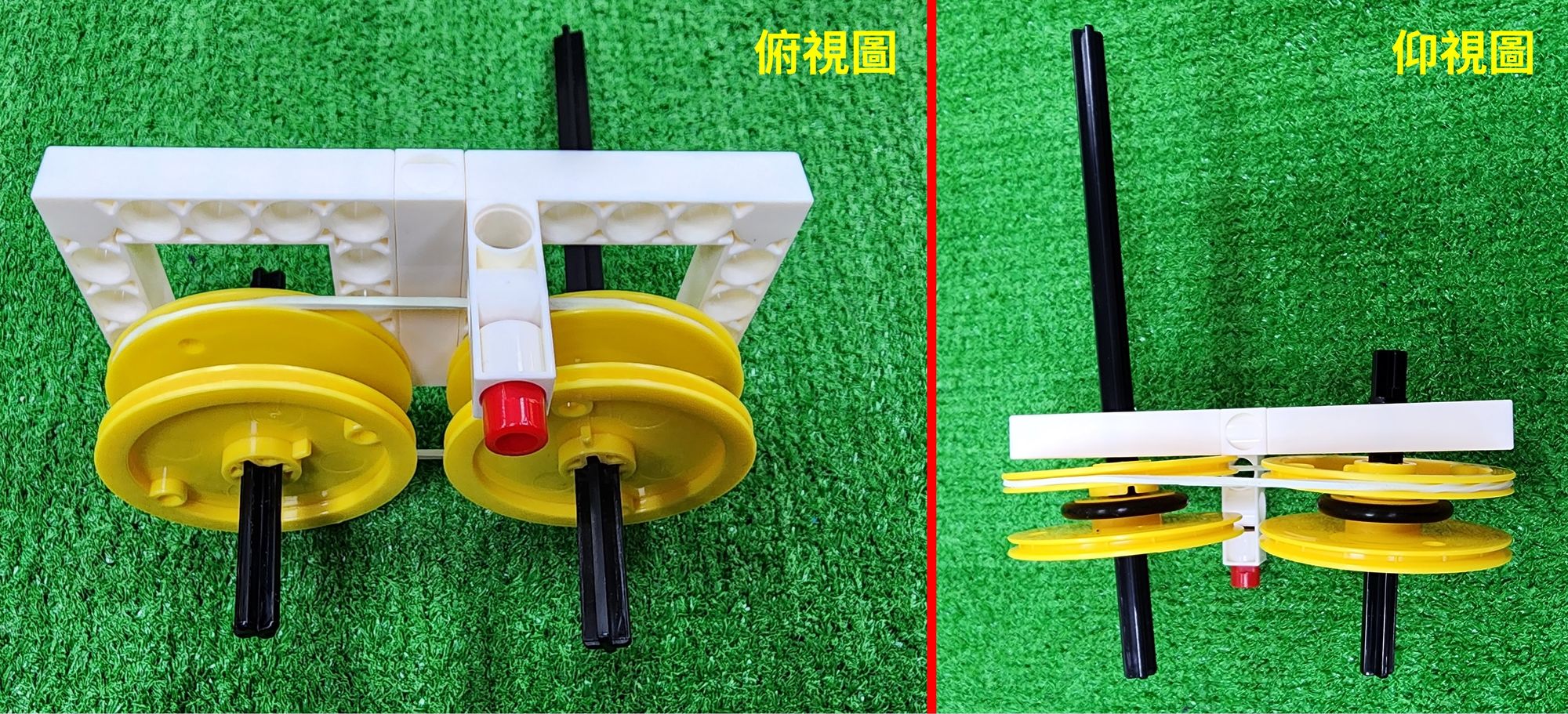
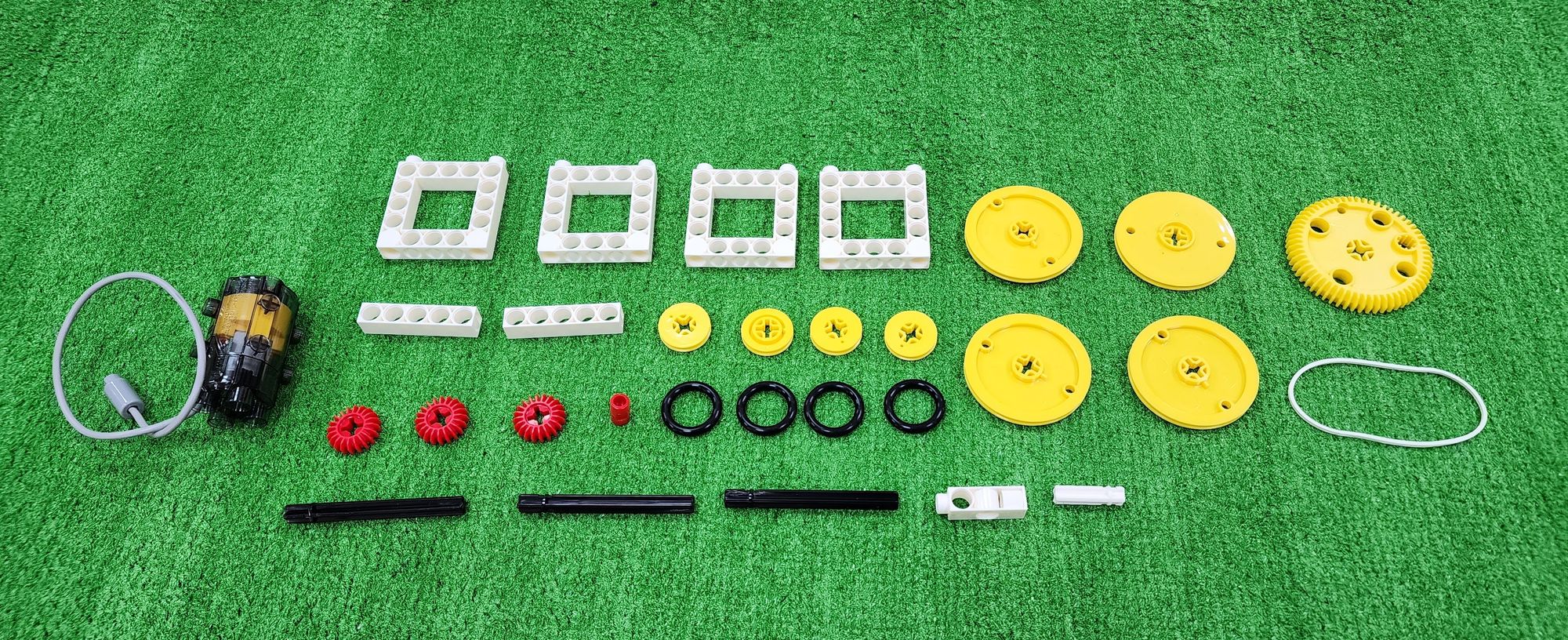
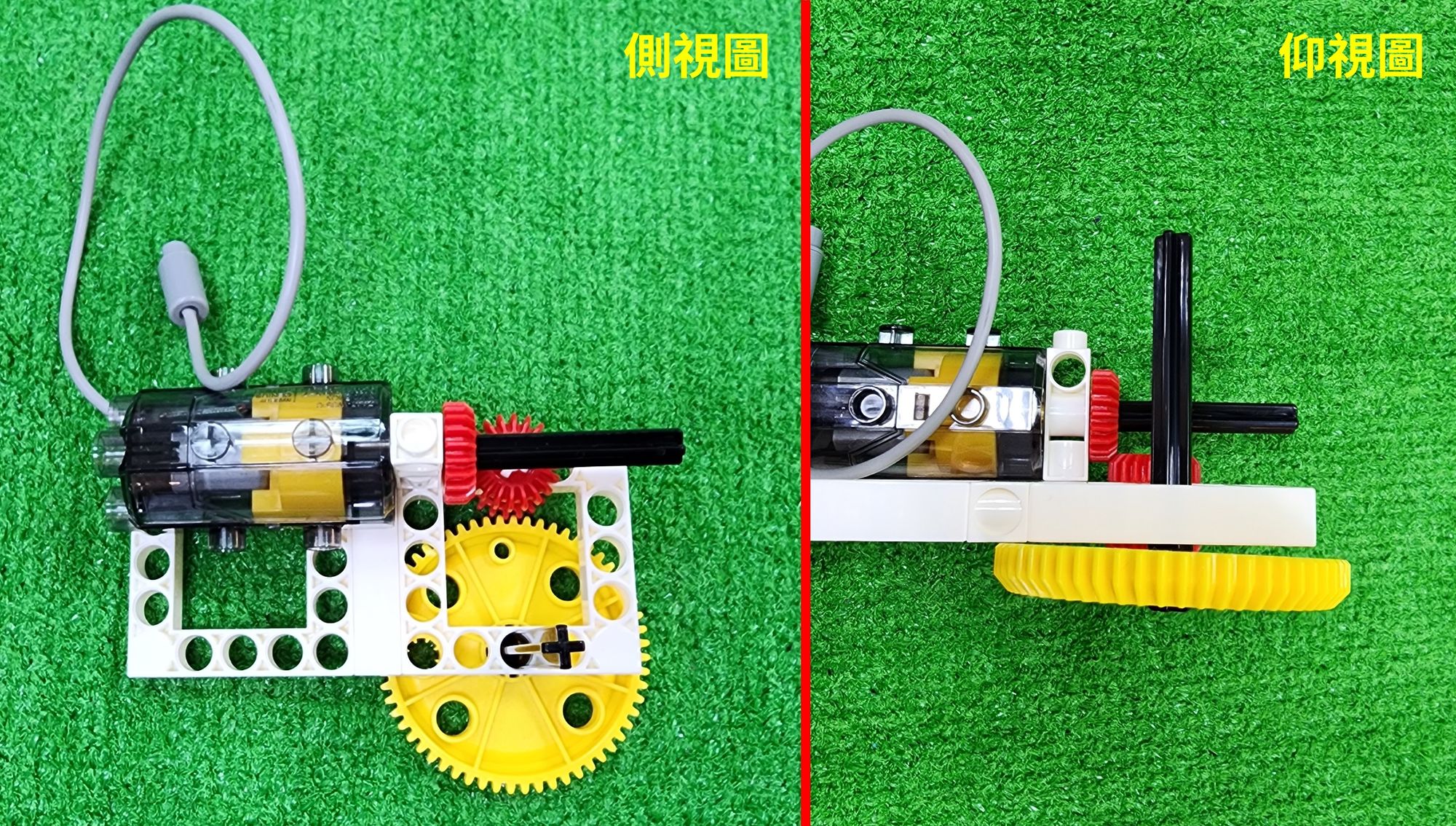
首先我們要來製做部件G,部件G是前後天車的主要動力來源,位於夾娃娃機左側的需要使用到5×5孔正方框、5孔長條、3孔超長條、70mmⅡ軸、150mmⅠ軸、27mm馬達短軸、20T齒輪、60T齒輪、OD53mm滑輪、OD23mm滑輪、OD26mm橡膠圈、長結合鍵、70mm橡皮筋以及50倍行星齒輪馬達盒(圖六六)。
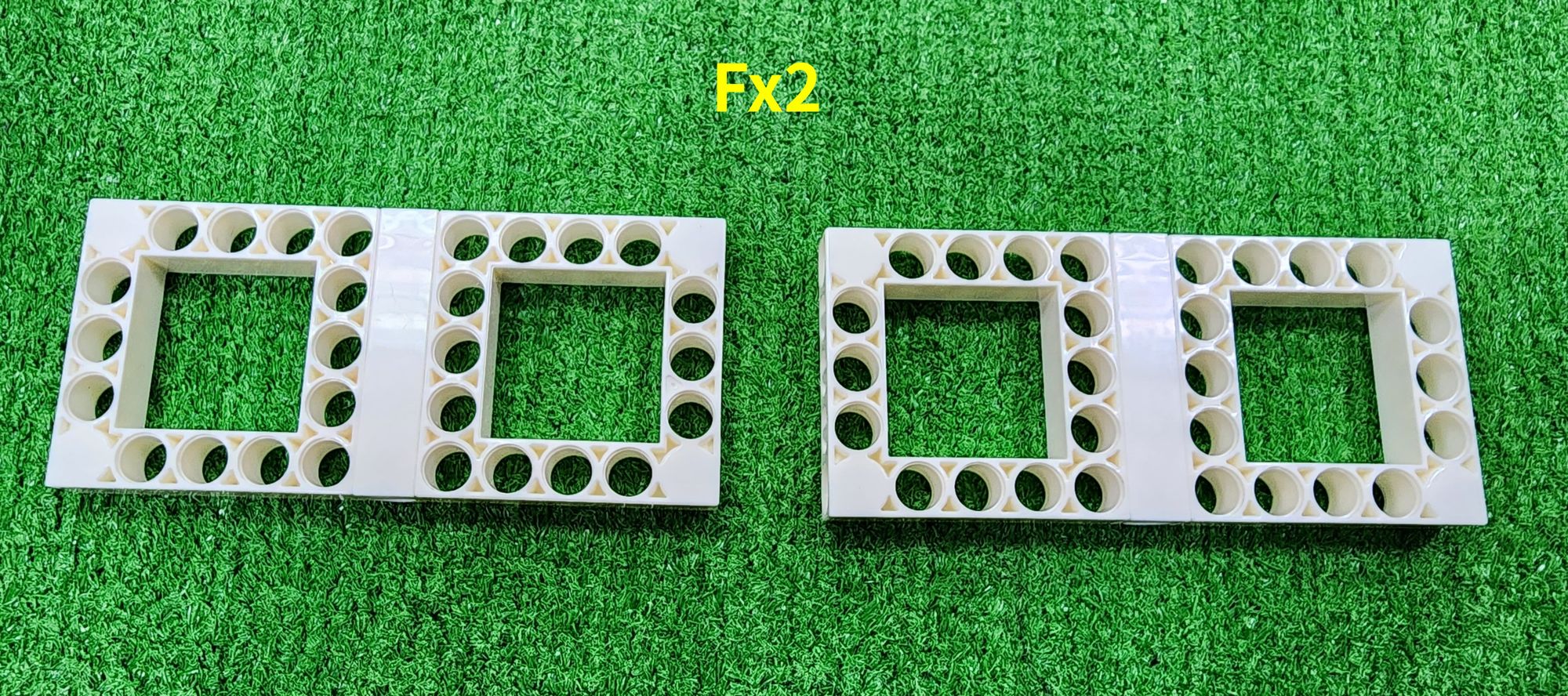
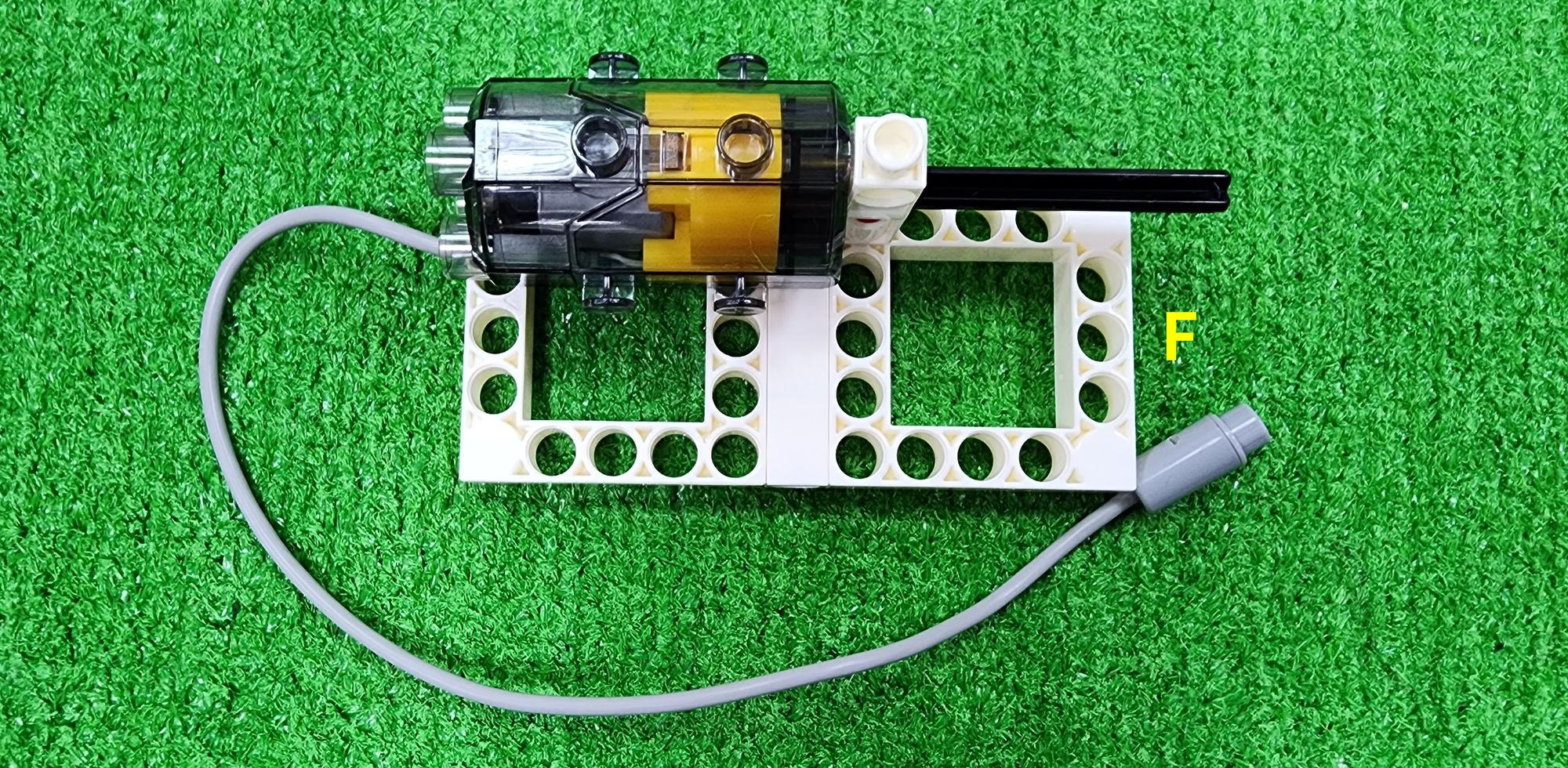
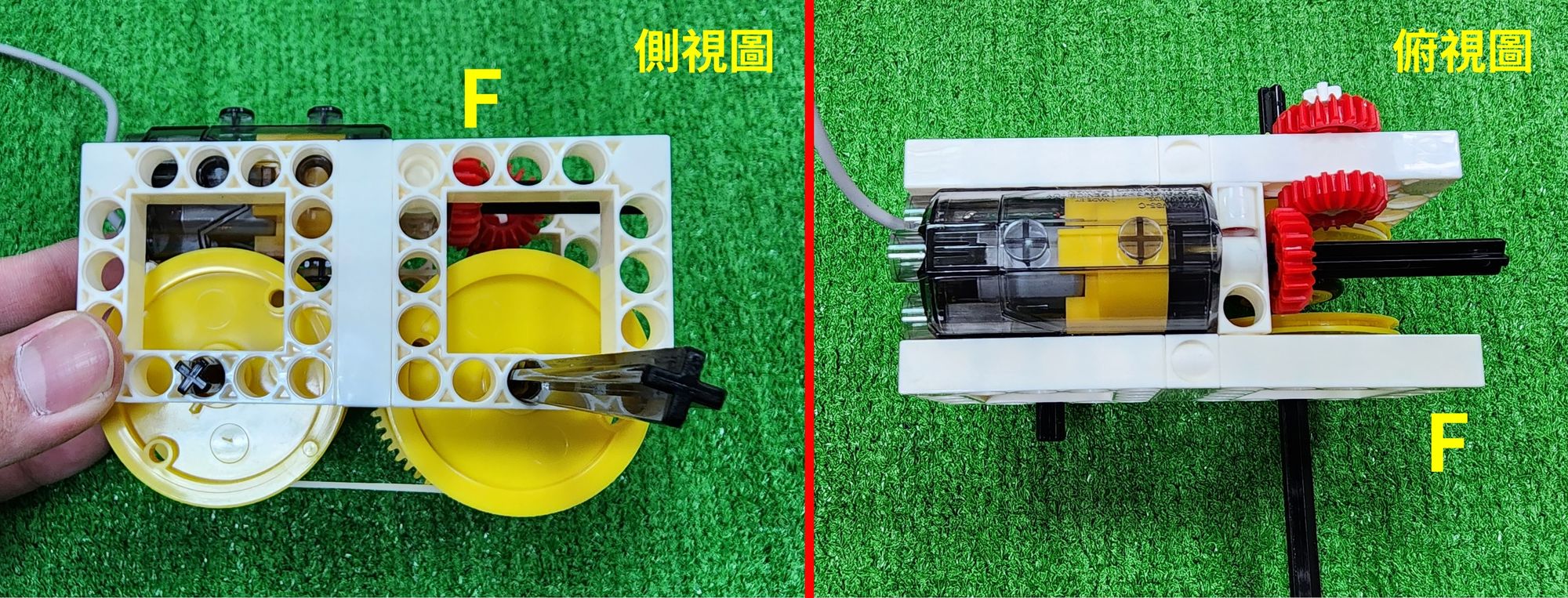
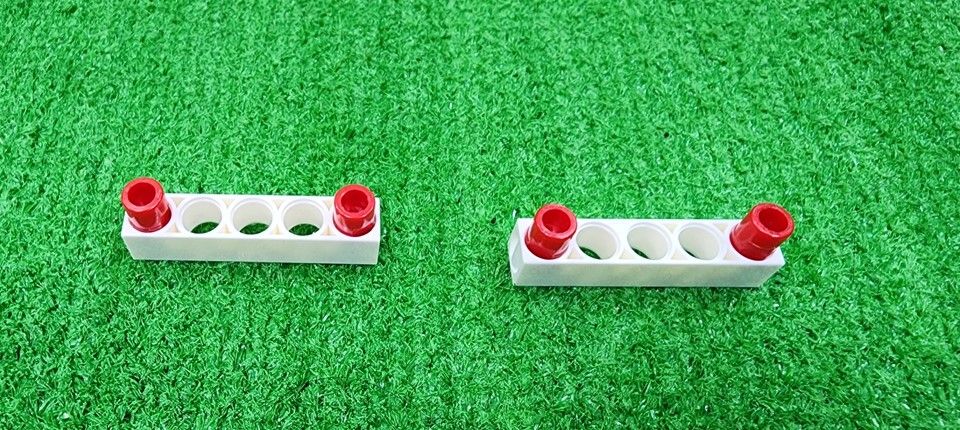
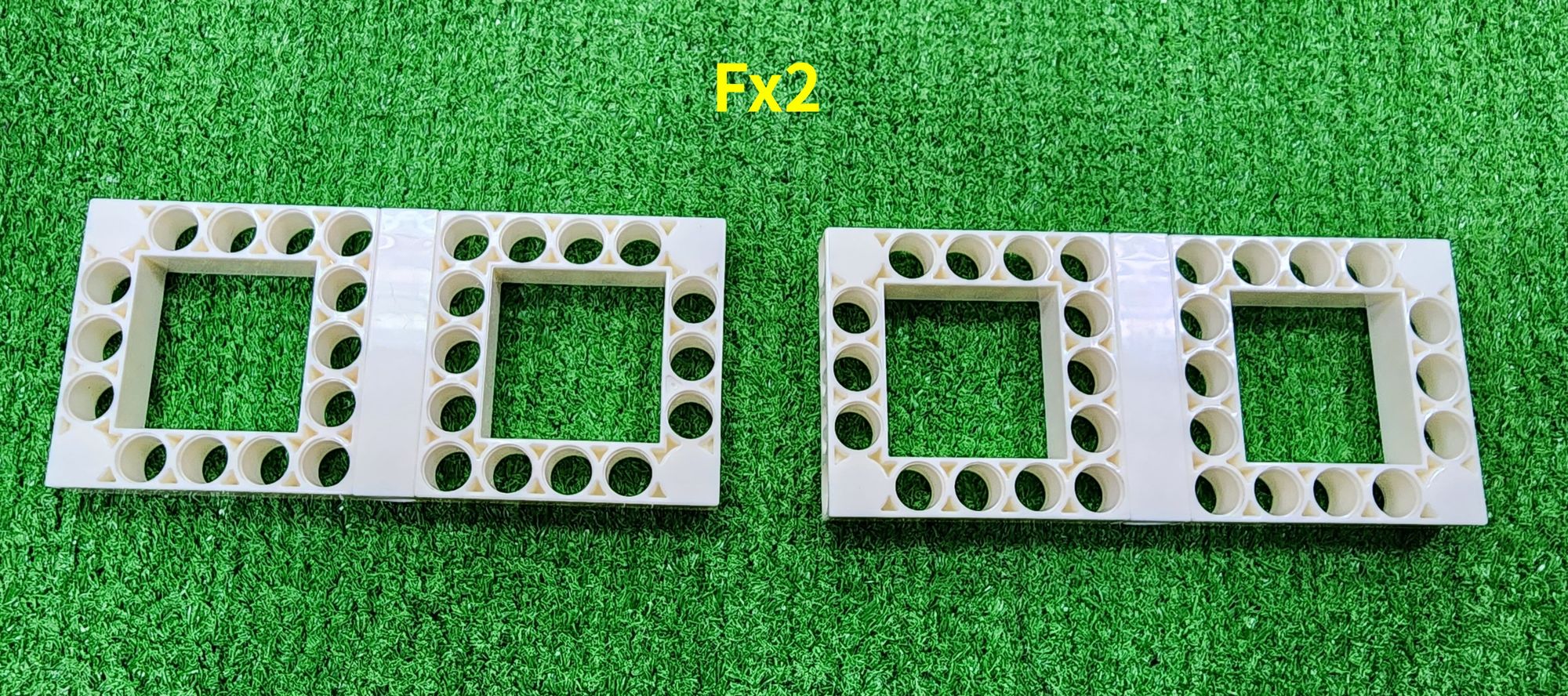
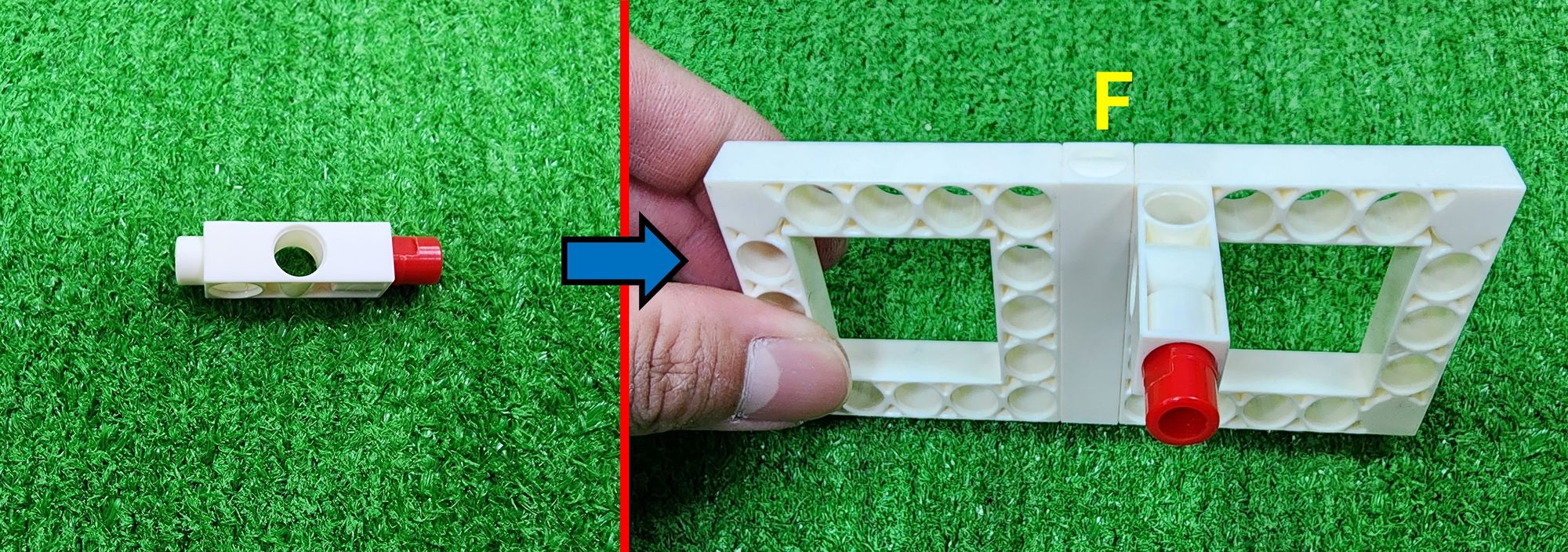
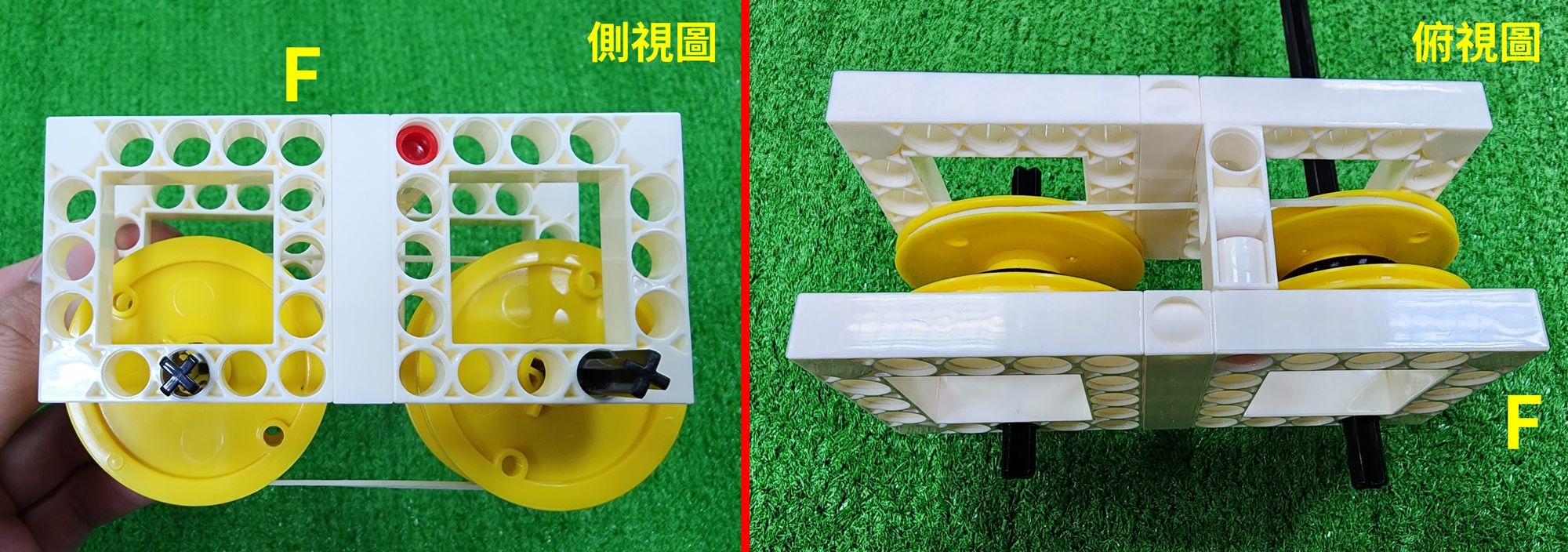
第十六步我們要依照圖示將5×5孔正方框和5孔長條相互結合,完成兩個部件F的製作(圖六七)。
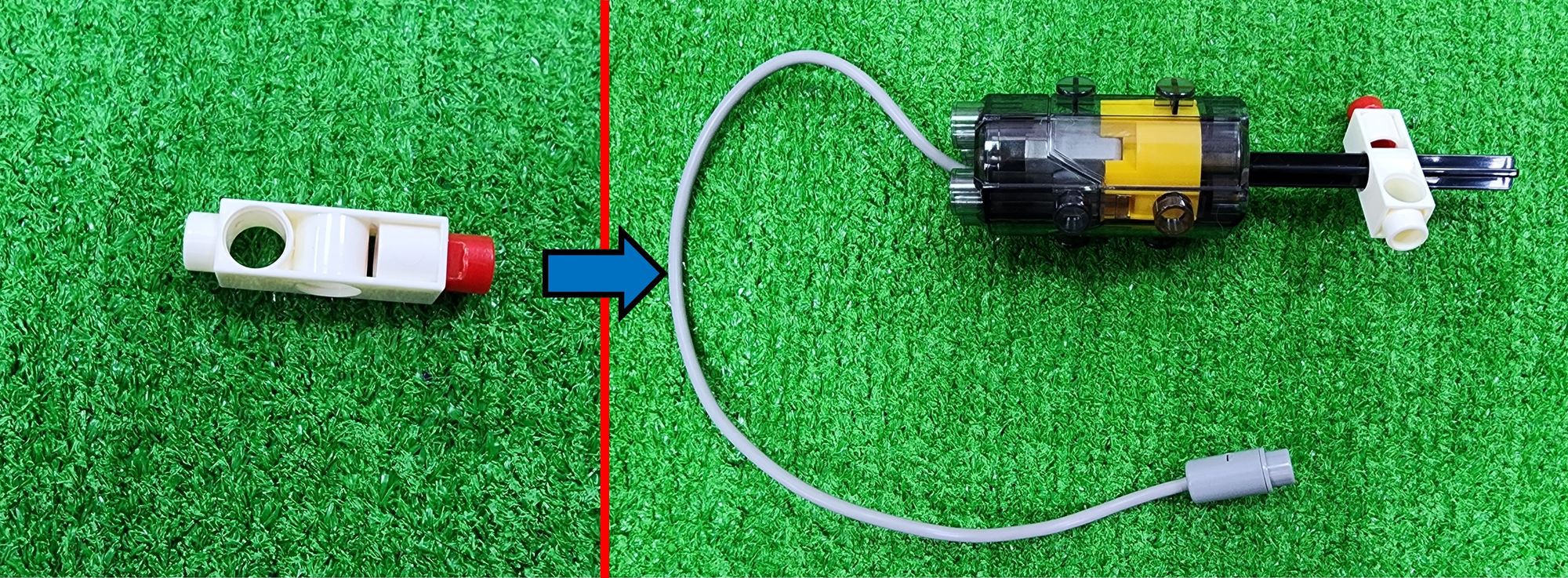
第十七步我們要依照圖示將70mmⅡ軸插入50倍行星齒輪馬達盒,並套入裝有長結合鍵的3孔超長條(圖六八),接著將50倍行星齒輪馬達盒安裝在部件F上(圖六九),最後再將20T齒輪插入70mmⅡ軸(圖七十)。
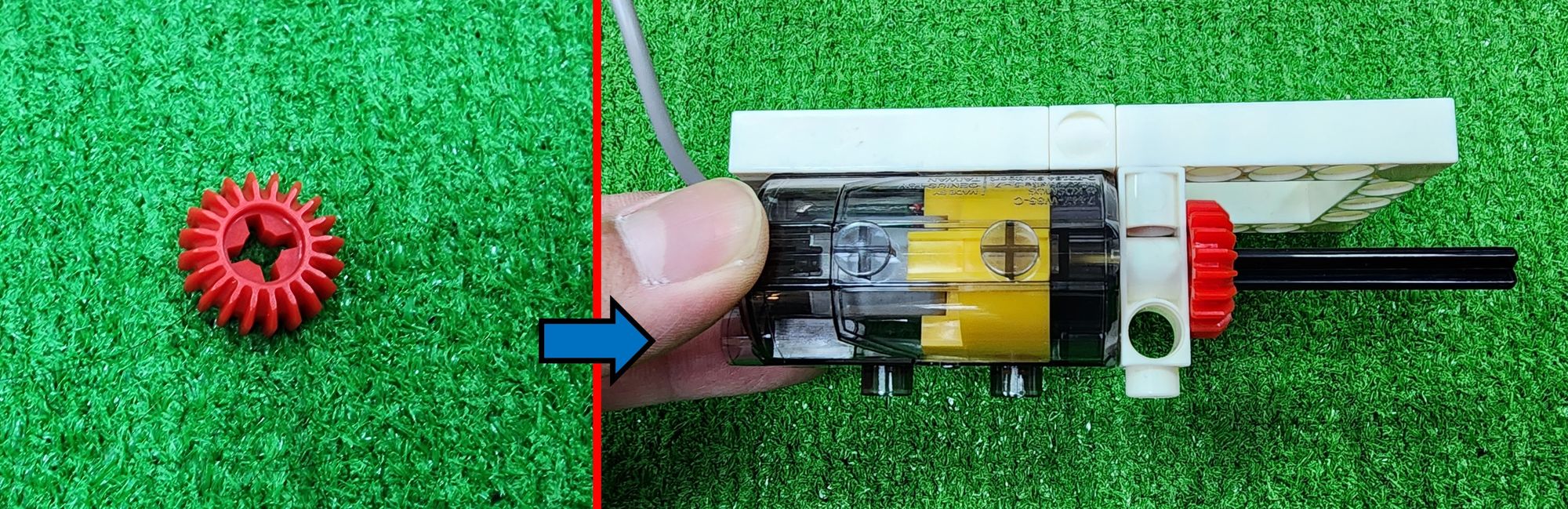
第十八步我們需要使用27mm馬達短軸以及20T齒輪(圖七一),依照圖示將20T齒輪安裝在部件F的兩側,並確保內側的20T齒輪和70mmⅡ軸上的20T齒輪相互嚙合(圖七二)。


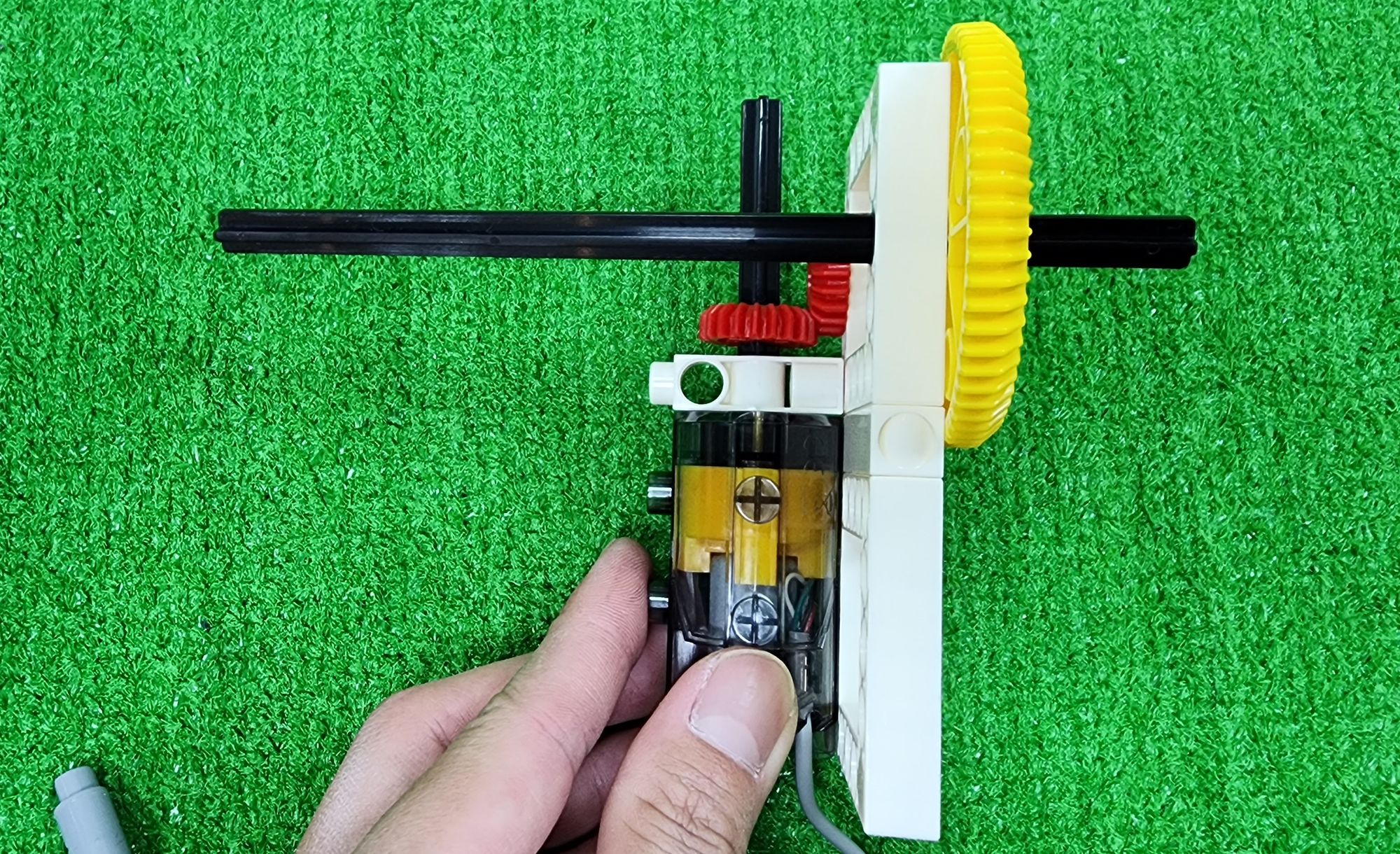
第十九步我們需要使用150mmⅠ軸以及60T齒輪(圖七三),並依照圖示安裝150mmⅠ軸以及60T齒輪(圖七四)。

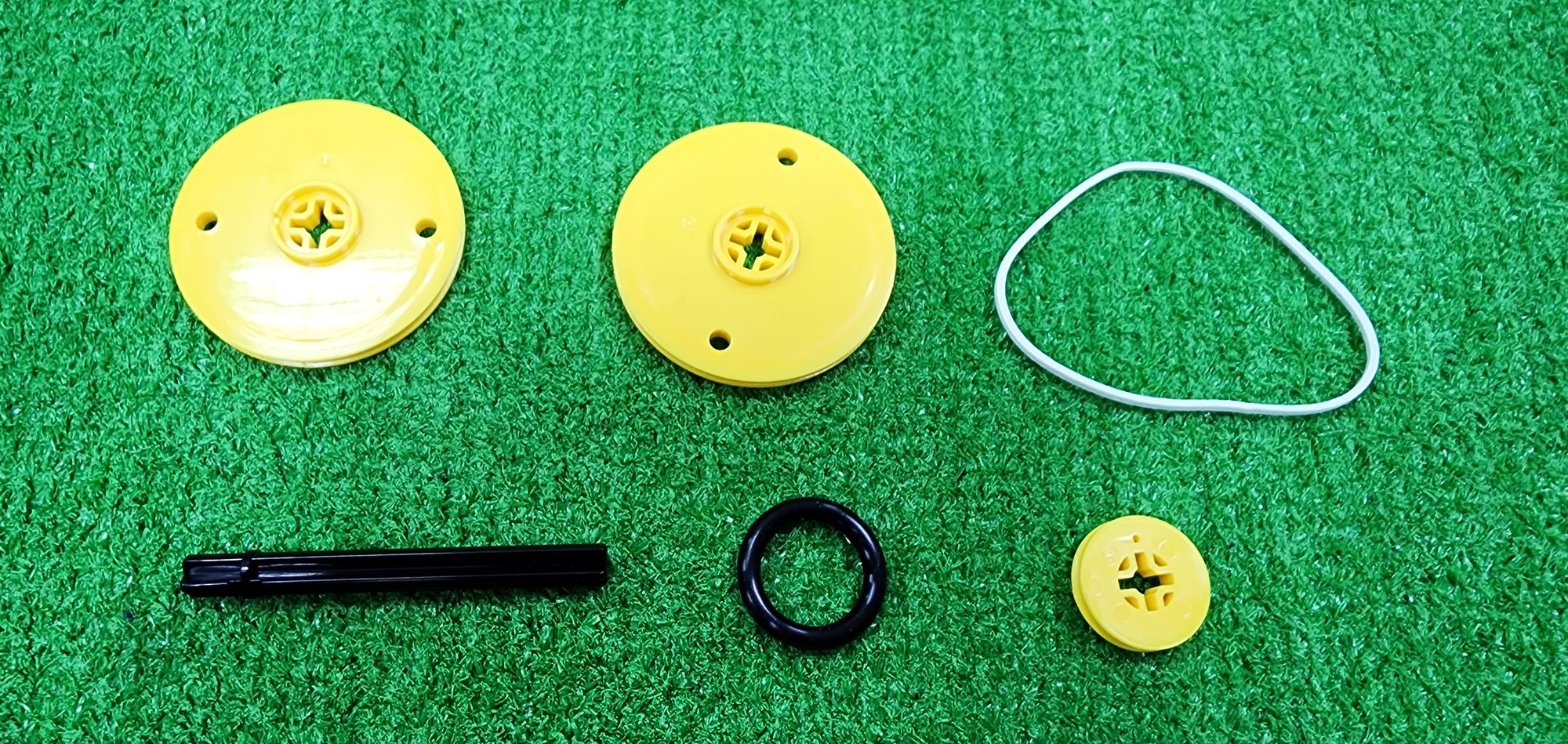
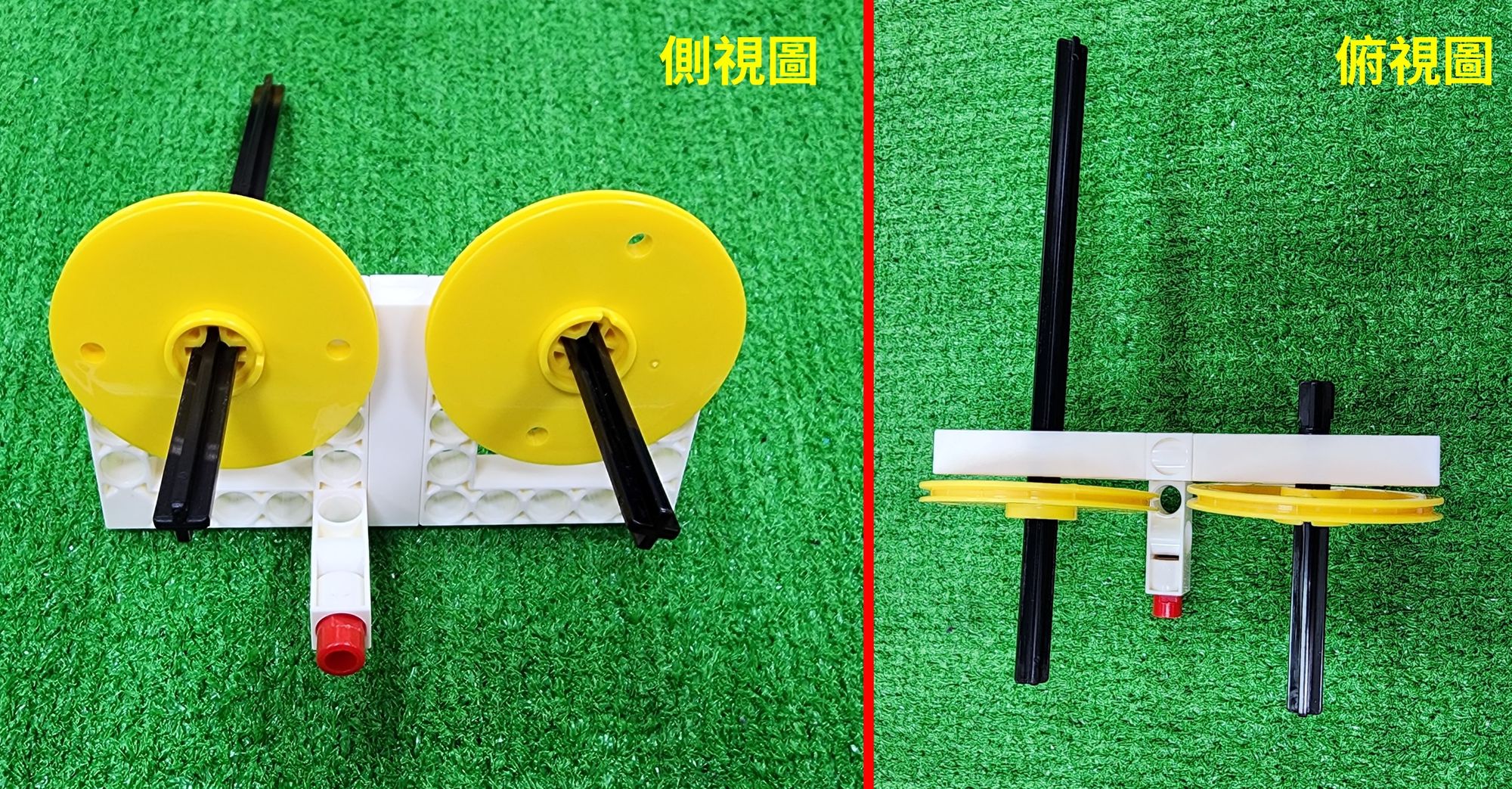
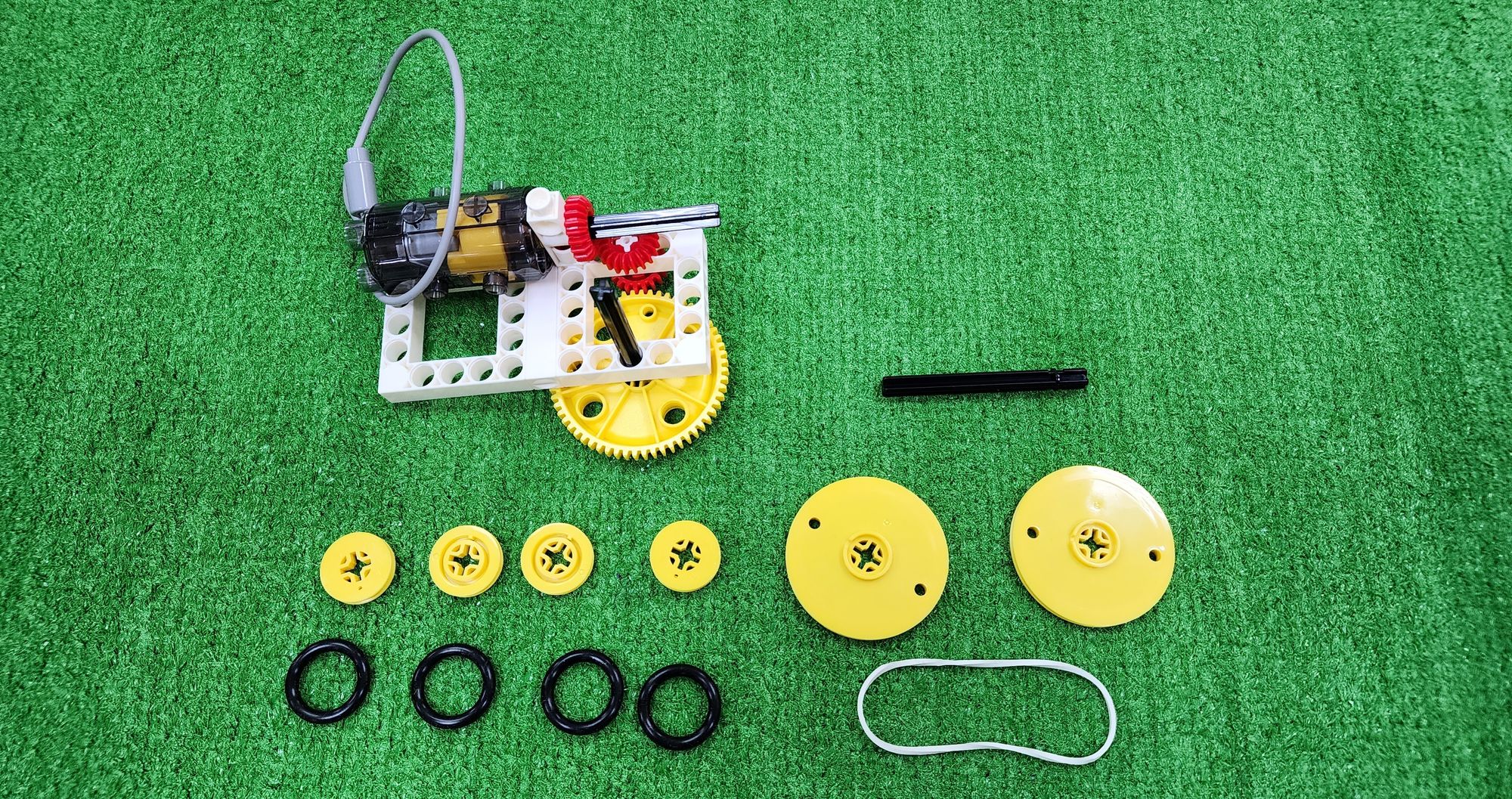
第二十步我們需要使用OD53mm滑輪、OD23mm滑輪以及OD26mm橡膠圈(圖七五),首先將OD26mm橡膠圈套在OD23mm滑輪外圍(圖七六),接著依照圖示將OD53mm滑輪和OD23mm滑輪安裝在150mmⅠ軸上,並確保OD23mm滑輪位於兩個OD53mm滑輪之間(圖七七)。


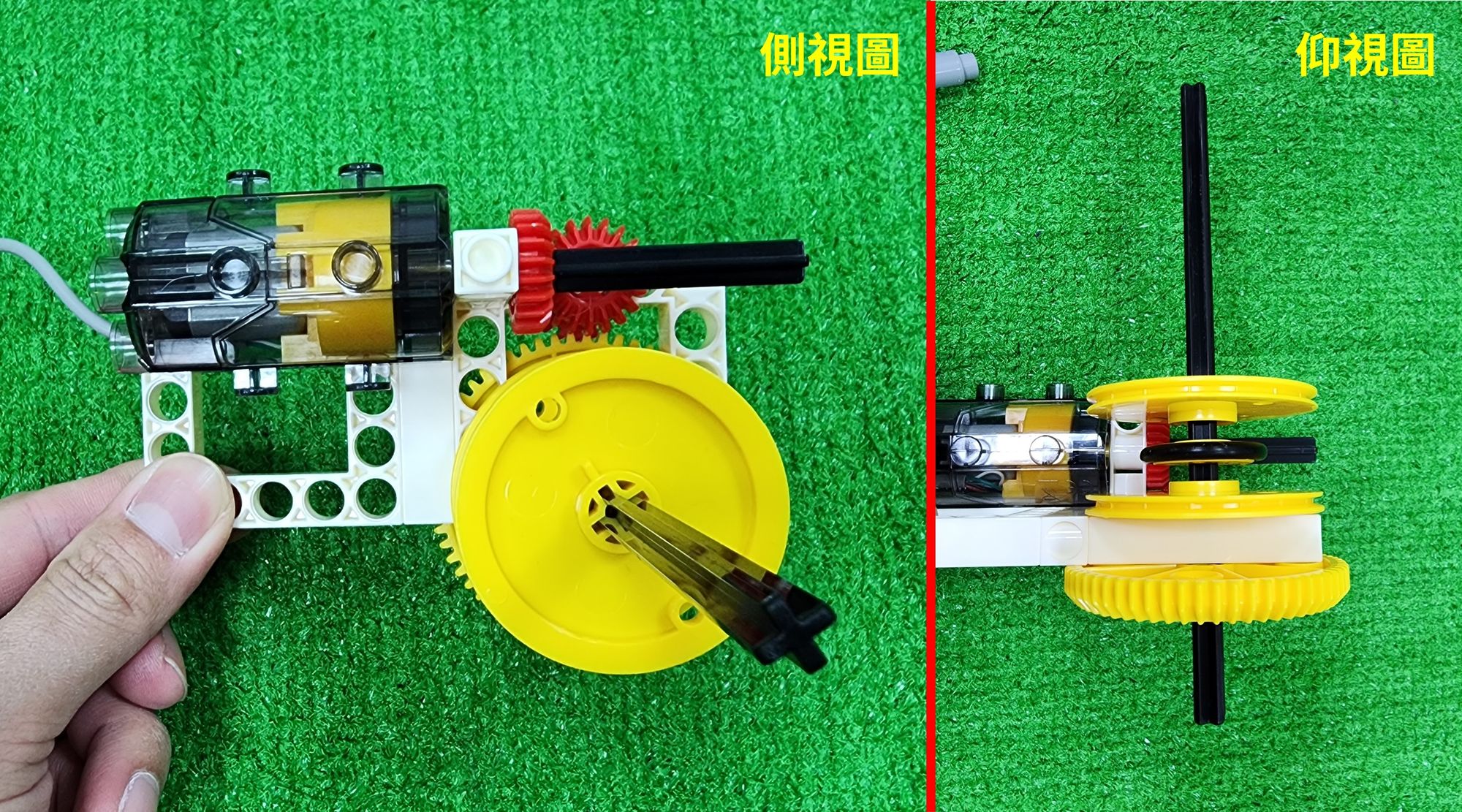
第二一步我們需要使用OD53mm滑輪、OD23mm滑輪、OD26mm橡膠圈、70mmⅡ軸以及70mm橡皮筋(圖七八),首先同樣將OD26mm橡膠圈套在OD23mm滑輪外圍(圖七九),接著依照圖示將70mmⅡ軸穿過部件F,並依序放入OD53mm滑輪和OD23mm滑輪,最後確保OD23mm滑輪位於兩個OD53mm滑輪之間(圖八十)。

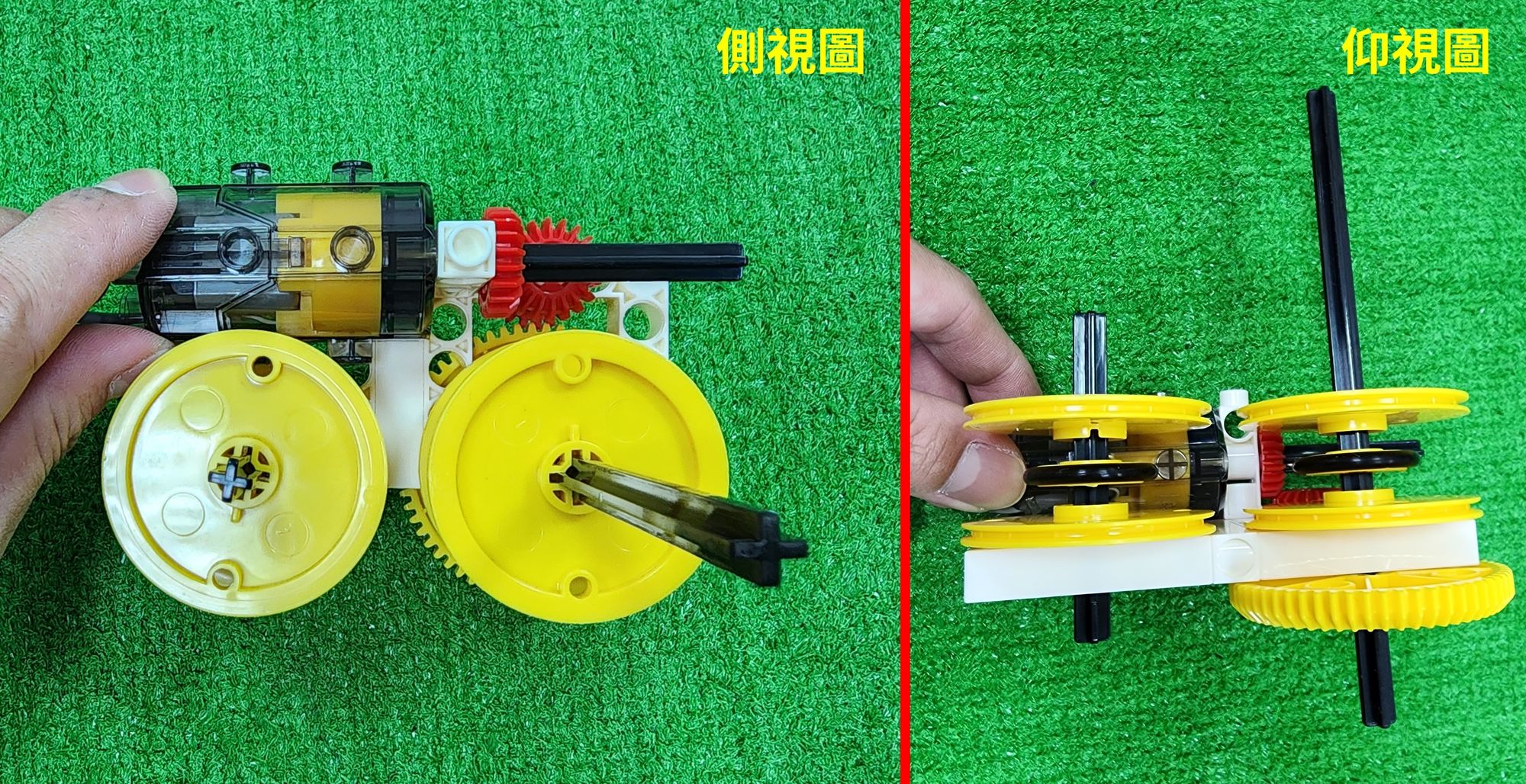
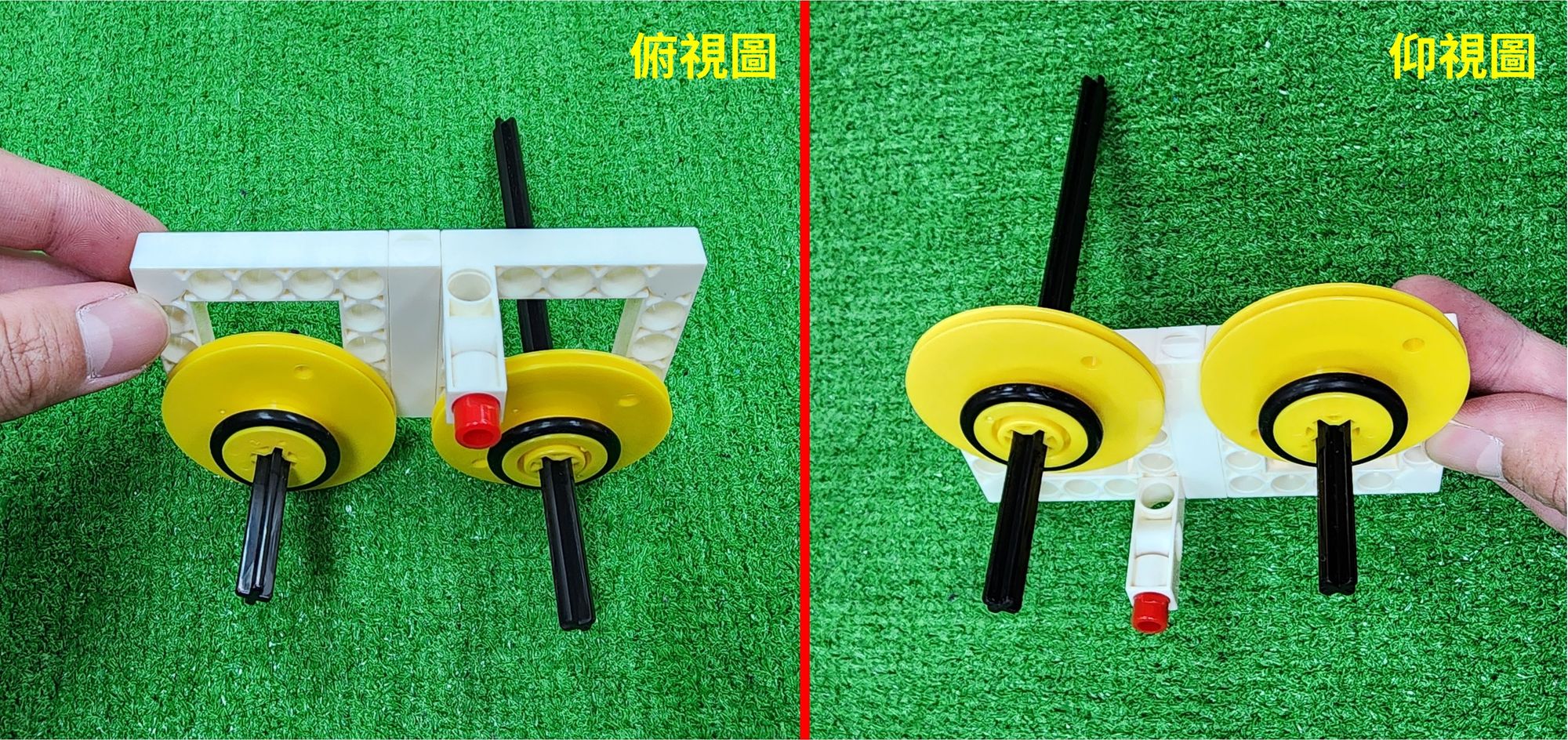
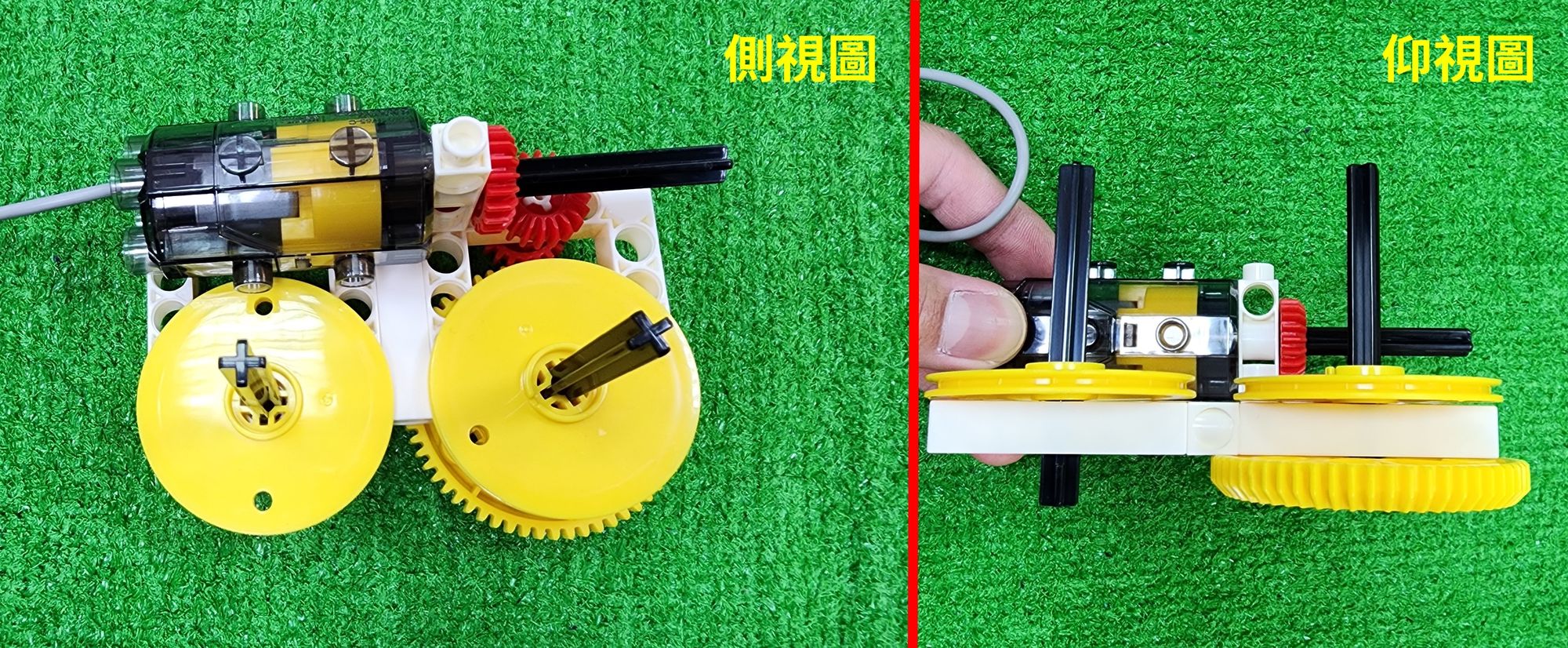
接著將70mm橡皮筋套在靠近部件F的兩個OD53mm滑輪外側(圖八一),當150mmⅠ軸轉動時,70mmⅡ軸也要跟著轉動。
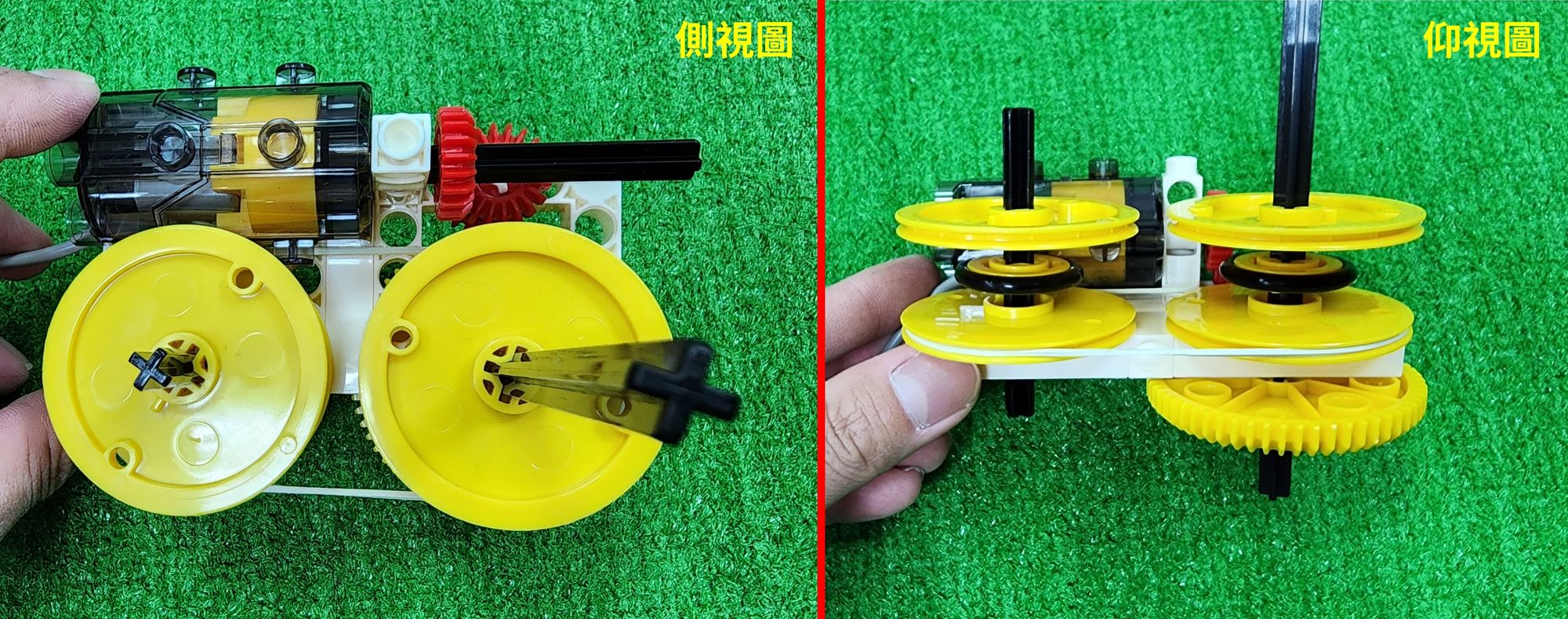
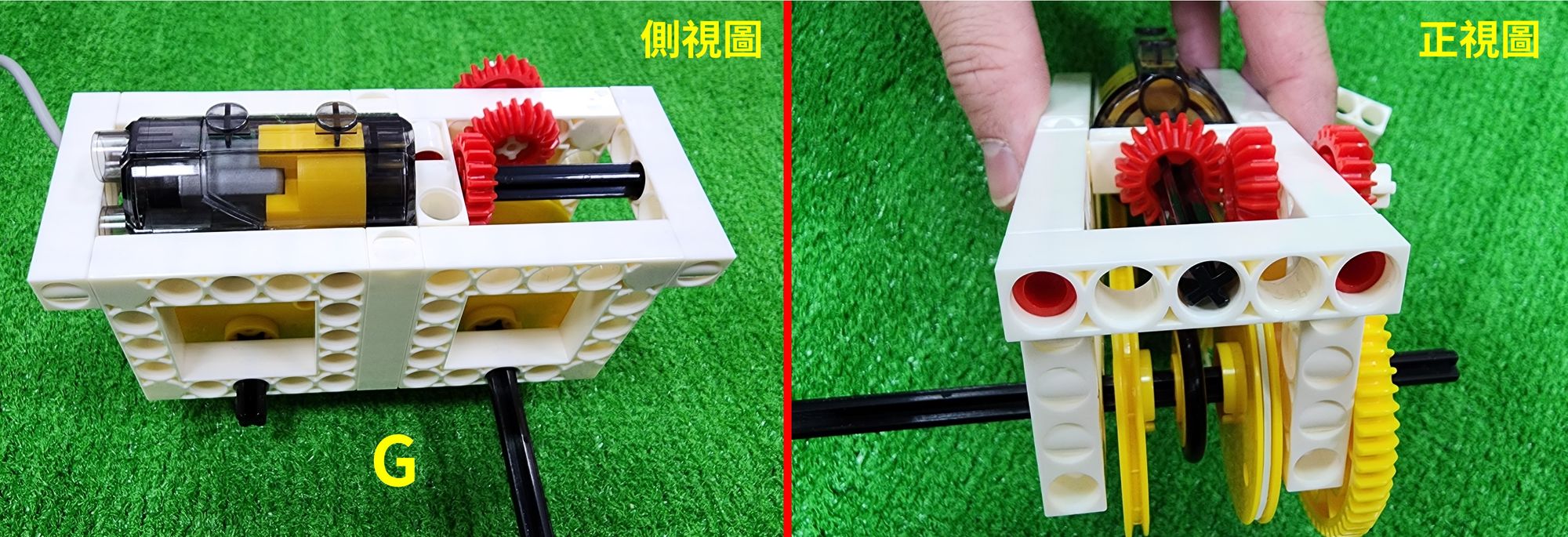
第二二步我們需要將另一個部件F穿過70mmⅡ軸和150mmⅠ軸,並和3孔超長條結合在一起(圖八二),接著依照圖示將長結合鍵和5孔長條結合(圖八三),再安裝在兩個部件F之間,部件G的製作就完成囉(圖八四)。
再來我們要製做部件H,當前後天車移動時,部件H會與部件G一同移動,需要使用到5×5孔正方框、5孔長條、3孔超長條、70mmⅡ軸、150mmⅠ軸、OD53mm滑輪、OD23mm滑輪、OD26mm橡膠圈、長結合鍵以及70mm橡皮筋(圖八五)。
第二三步與第十六步相同,需要將5×5孔正方框和5孔長條相互結合,完成兩個部件F(圖八六)。
第二四步我們要依照圖示將長結合鍵插入3孔超長條,接著將3孔超長條安裝在部件F上(圖八七)。
第二五步我們需要使用150mmⅠ軸、70mmⅡ軸以及OD53mm滑輪,依照圖示將150mmⅠ軸以及70mmⅡ軸插入部件F,接著在另一側各放上一個OD53mm滑輪(圖八八)。
第二六步需要使用OD23mm滑輪和OD26mm橡膠圈,接著同樣將OD26mm橡膠圈套在OD23mm滑輪外圍(圖八九),並依照圖示將OD23mm滑輪安裝在150mmⅠ軸以及70mmⅡ軸上(圖九十)。

第二七步需要使用OD53mm滑輪以及70mm橡皮筋,首先依照圖示將OD53mm滑輪安裝在150mmⅠ軸以及70mmⅡ軸上(圖九一),接著同樣將70mm橡皮筋套在靠近部件F的兩個OD53mm滑輪外側(圖九二),並確保當150mmⅠ軸轉動時,70mmⅡ軸也要跟著轉動。
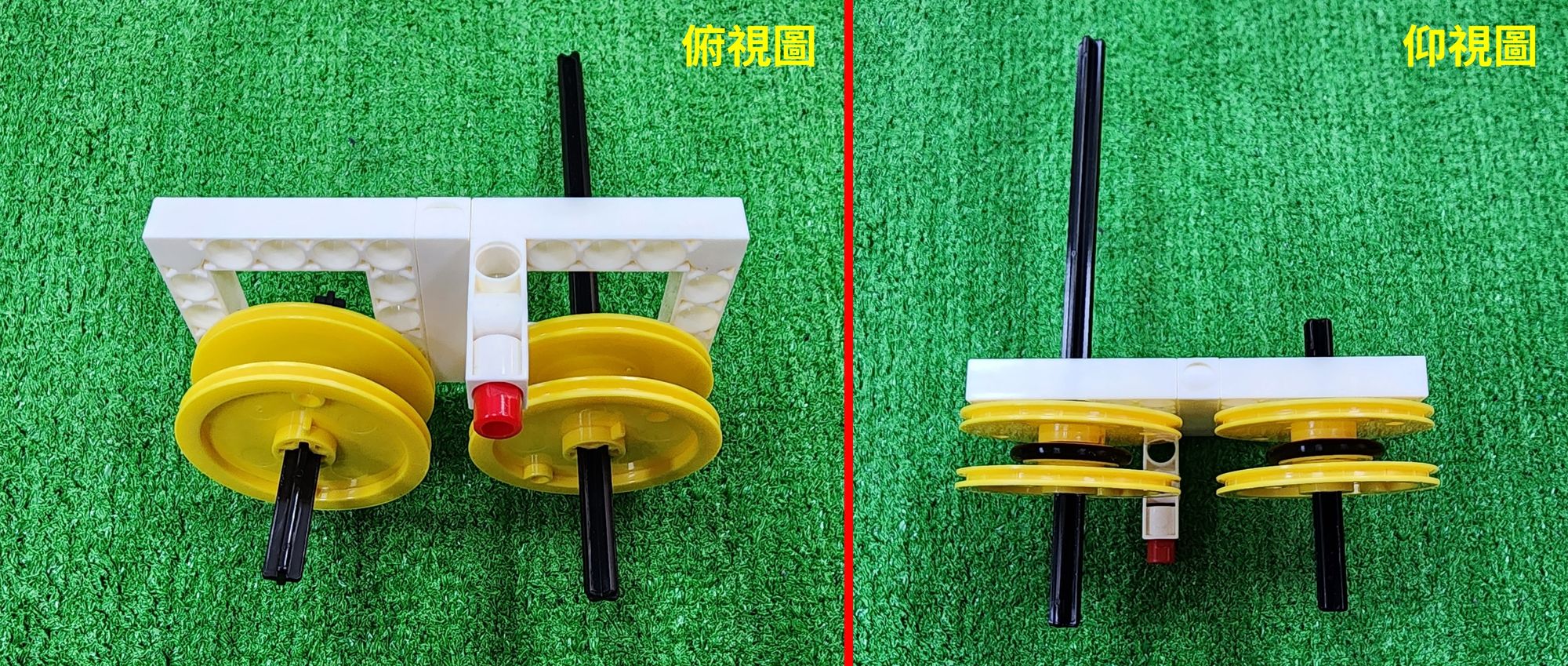
第二八步我們需要將另一個部件F穿過70mmⅡ軸和150mmⅠ軸,並和3孔超長條結合在一起(圖九三),接著依照圖示將長結合鍵和5孔長條結合(圖九四),再安裝在兩個部件F之間,部件H的製作就完成囉(圖九五)。

現在我們已經完成了部件G以及部件H(圖九六),也就是前後天車的左、右兩部分,我們會在後續的組裝步驟中使用到它們,可以先將它們放在一旁。

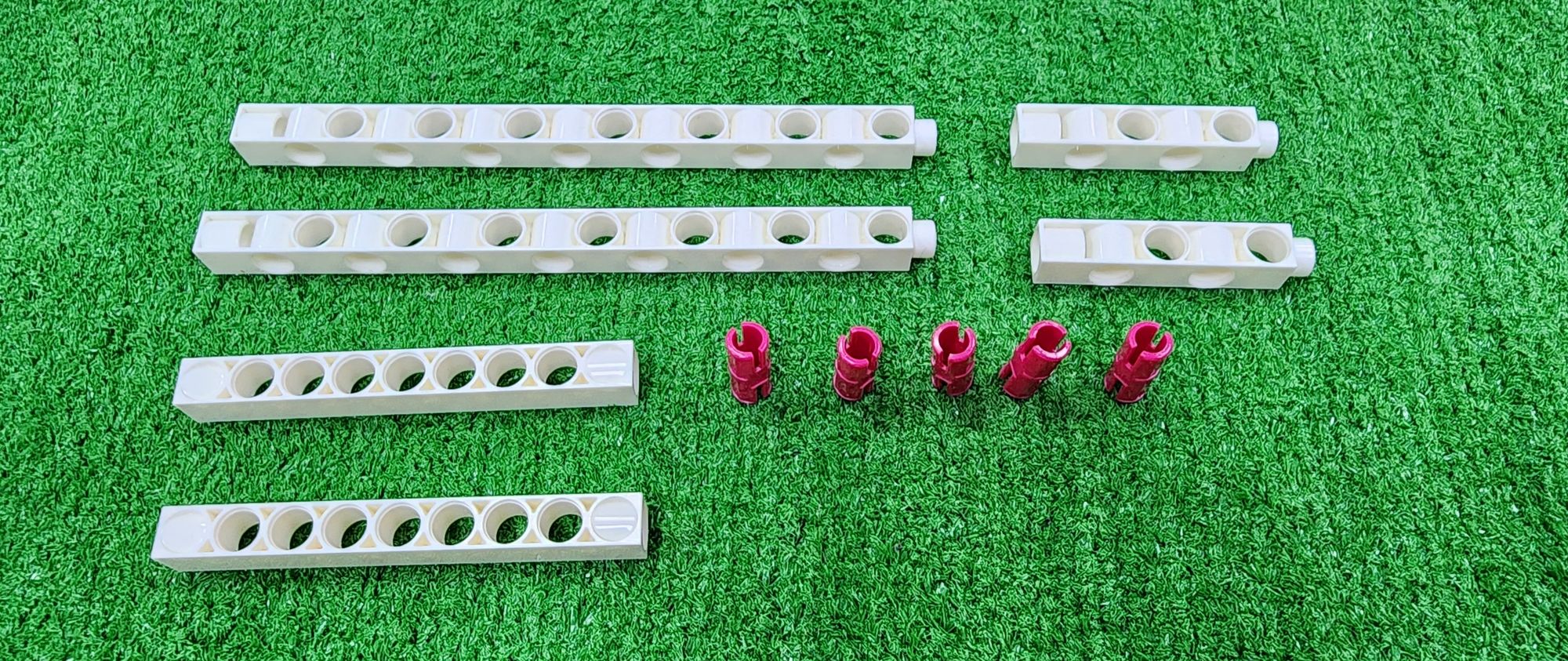
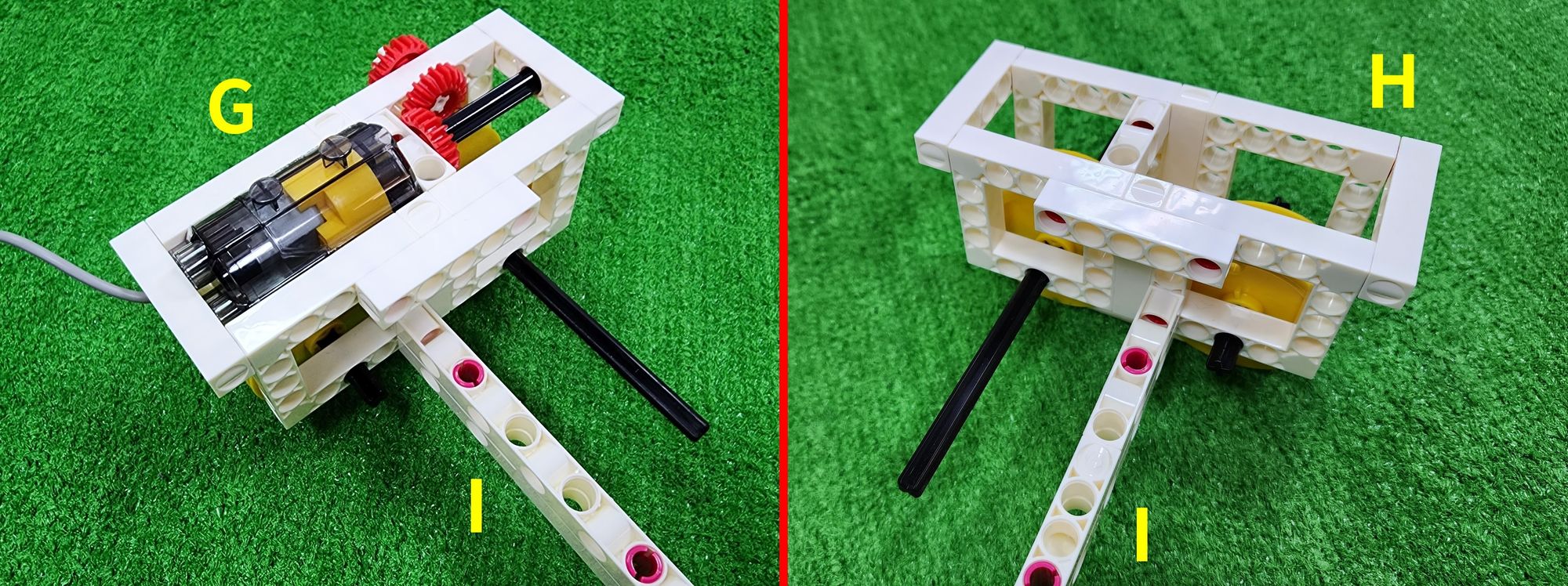
第二九步我們要製做左右軌道(部件I),需要使用到15孔超長條、5孔超長條、9孔長條側有孔以及栓扣鍵(圖九七),首先依照圖示將15孔超長條、5孔超長條以及9孔長條側有孔結合成兩個組件,接著再將栓扣鍵安裝在其中一個組件上(圖九八)。
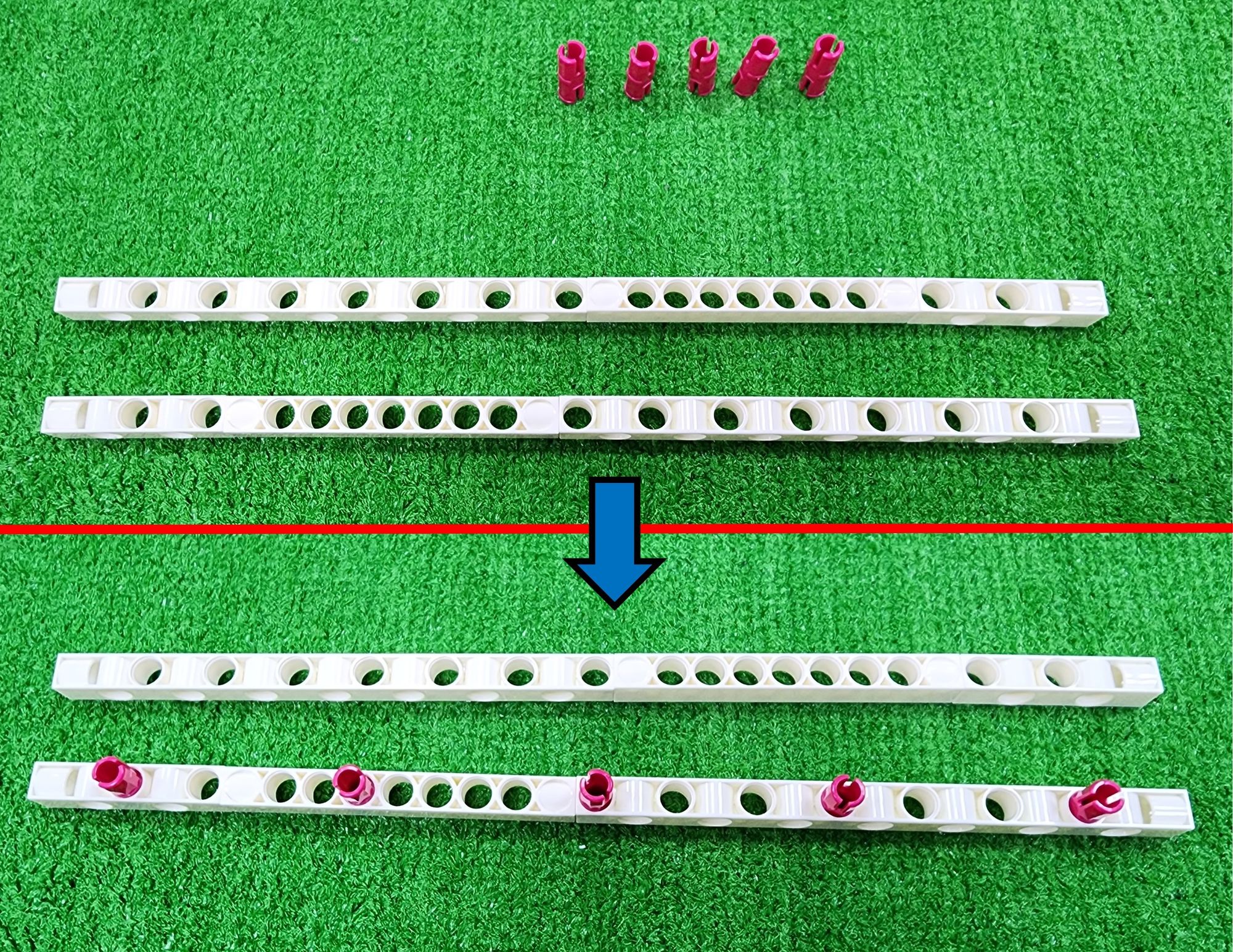
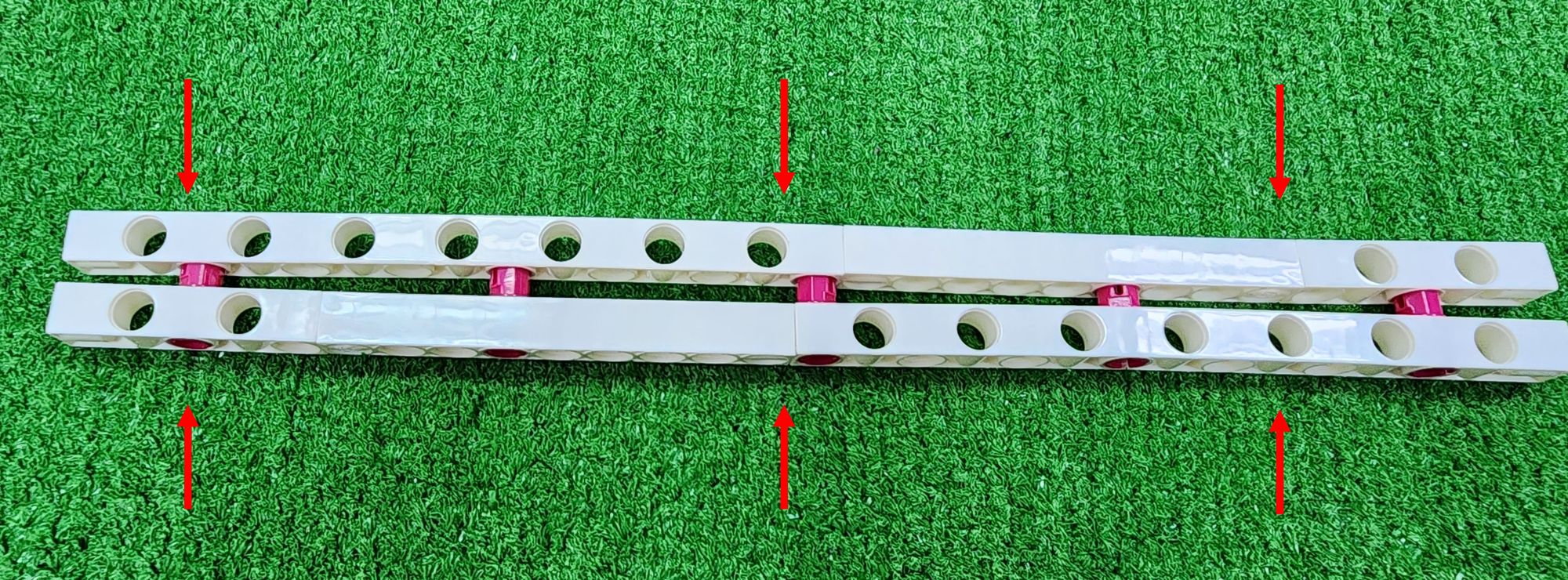
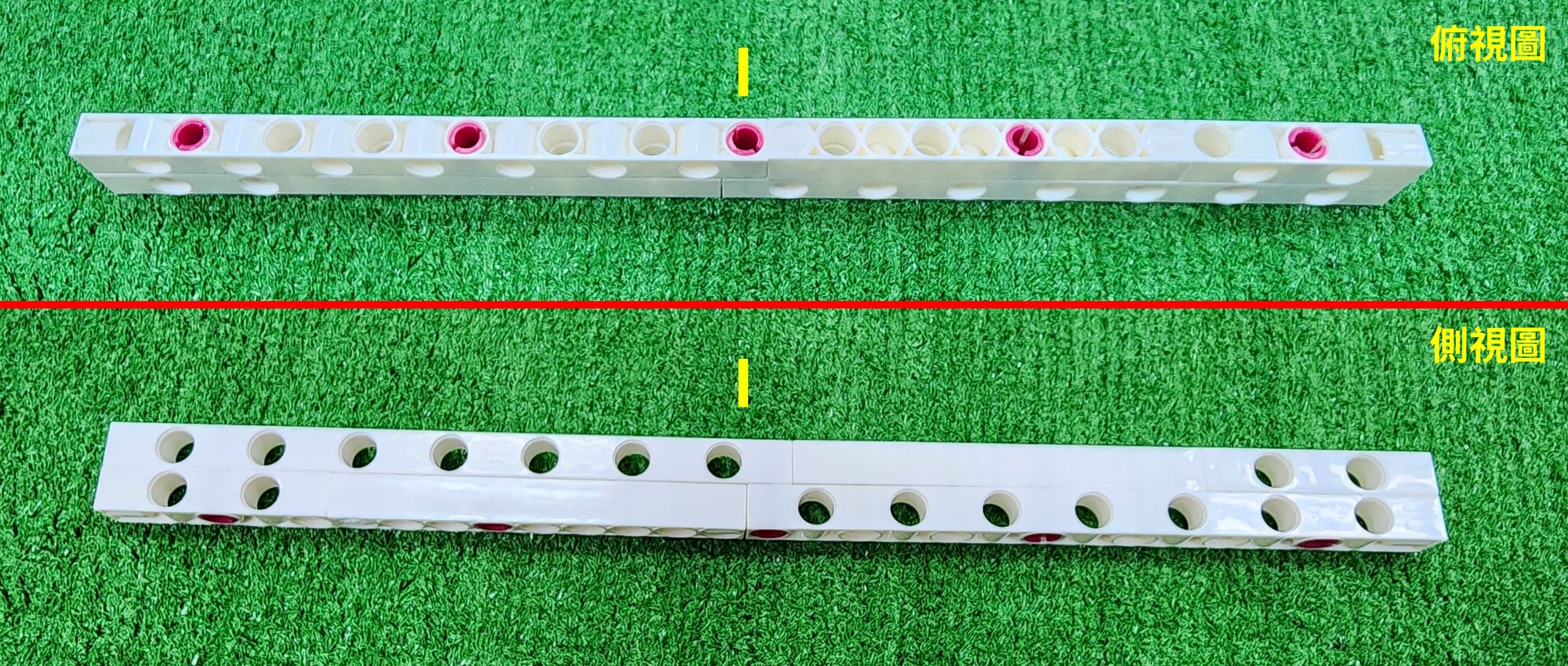
接著我們將兩個部件重疊並向內按壓,透過栓扣鍵將兩個部件結合在一起(圖九九),這樣就完成部件I,也就是左右軌道的製作了(圖一零零)。
最後我們要來組裝前後天車,需要使用到部件G、部件H、部件I、150mmⅠ軸、5孔長條、捲線器(7900-W10-H1SK)以及長結合鍵(圖一零一)。
第三十步我們需要使用長結合鍵以及5孔長條,首先依照圖示將長結合鍵安裝在部件G和部件H上(圖一零二),接著再將5孔長條與上方的長結合鍵結合(圖一零三)。

第三一步我們需要將部件I的左、右兩端與部件G和部件H上的長結合鍵結合(圖一零四),完成後前後天車的整體結構(圖一零五)。
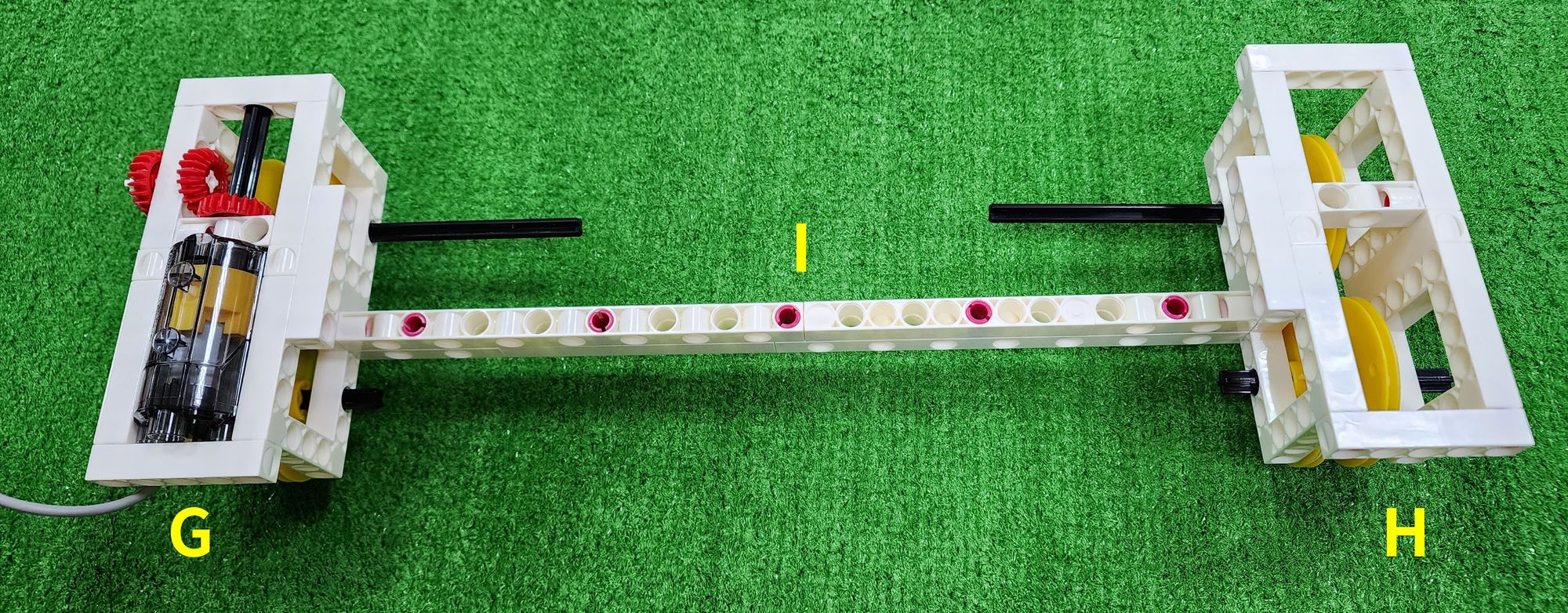
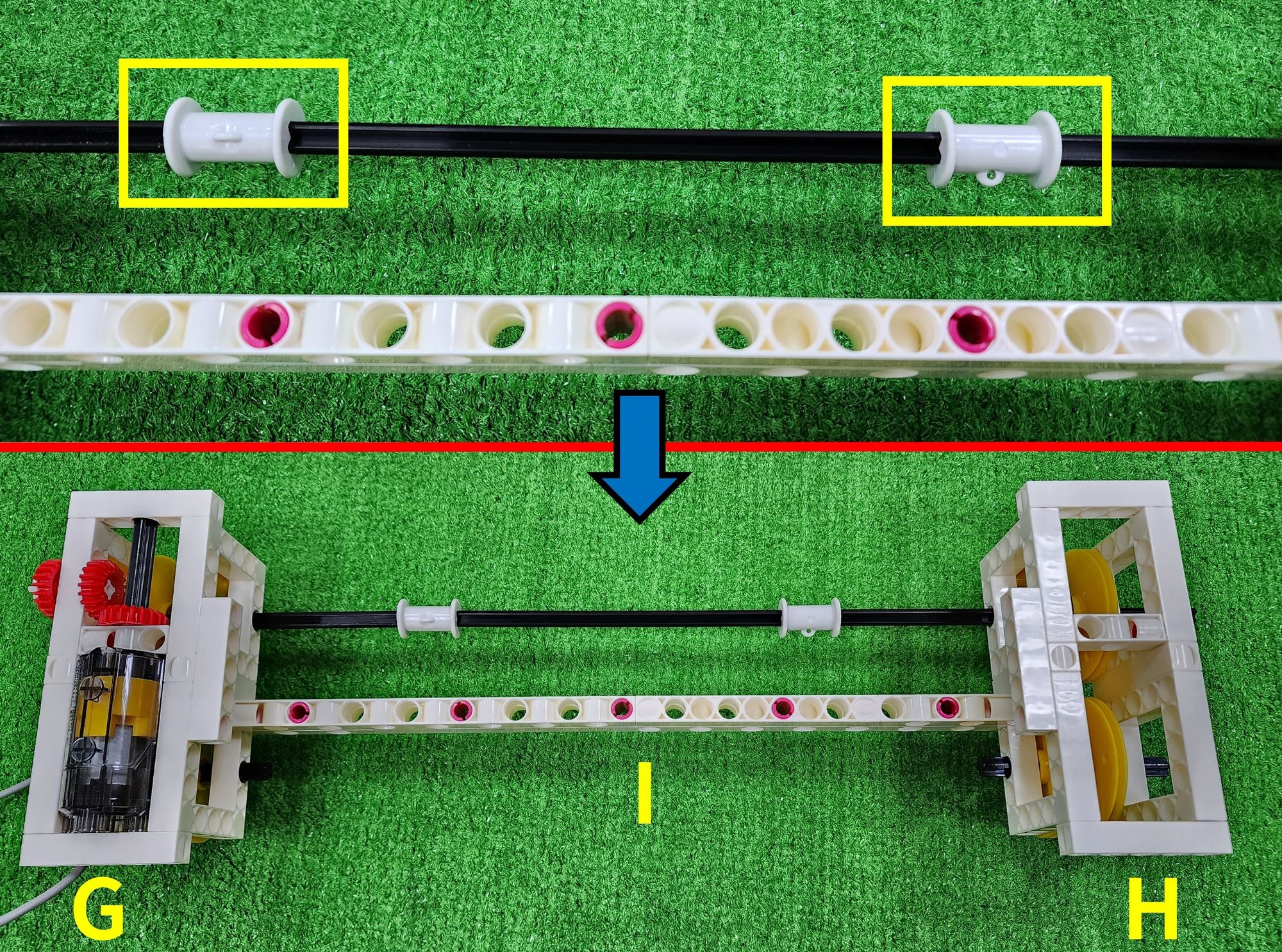
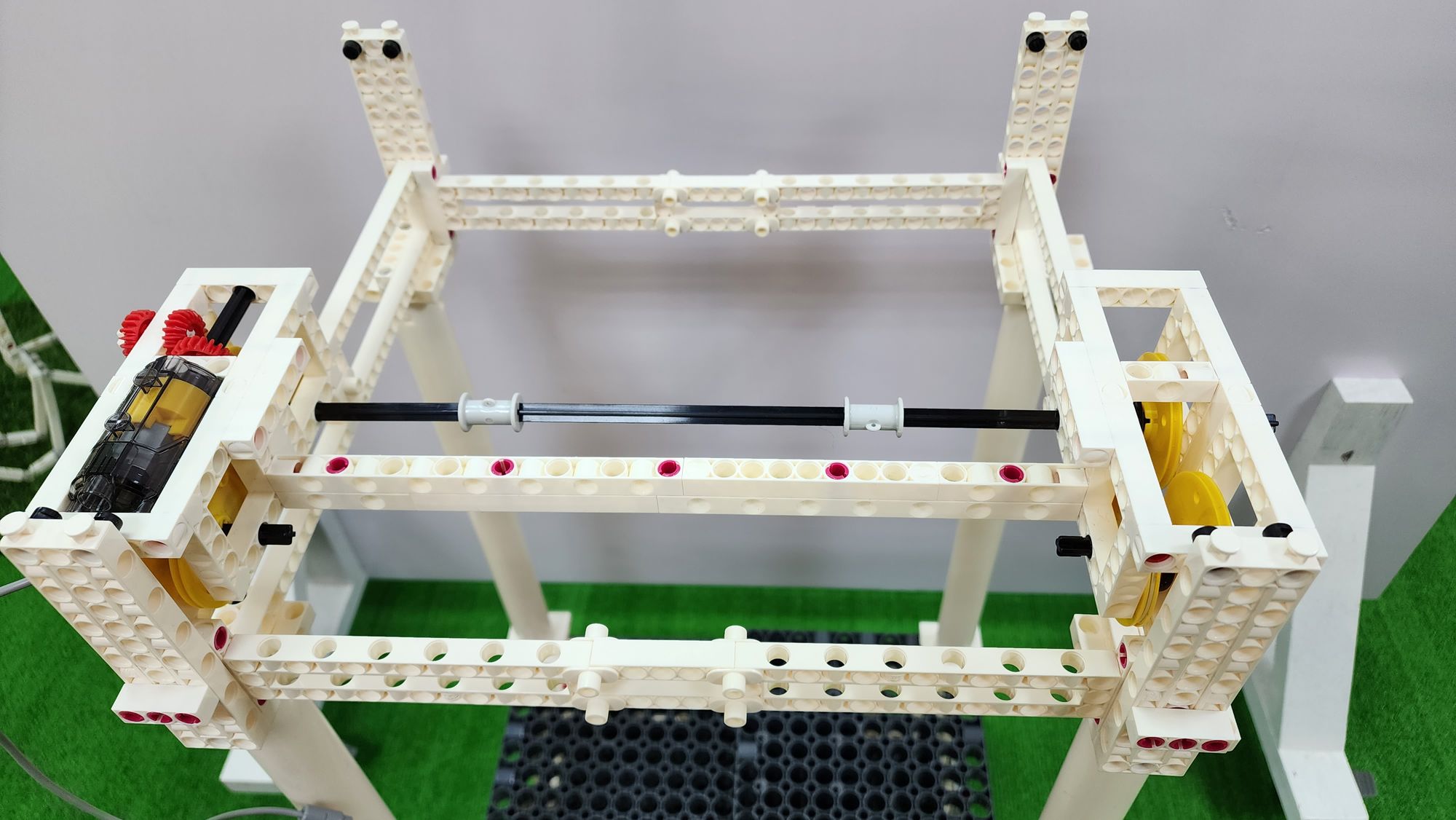
第三二步我們需要使用150mmⅠ軸以及捲線器,透過捲線器將三根150mmⅠ軸連接在一起。你可以先分別將部件G和部件H上的150mmⅠ軸往外推,預留一段空間放置中間的150mmⅠ軸,待中間的150mmⅠ軸放置完成後,再將部件G和部件H上的150mmⅠ軸往內推,並插入捲線器中,這樣就完成前後天車的製作囉(圖一零六)。
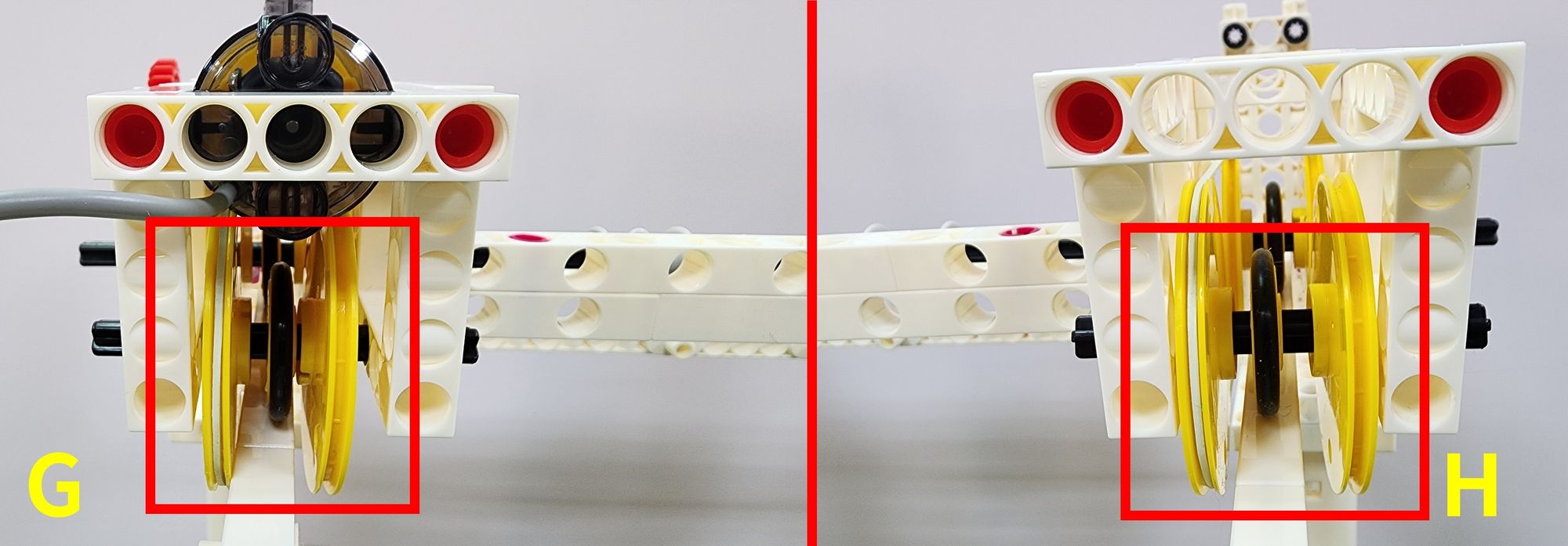
第三三步我們需要將整個前後天車放置在前後軌道上(圖一零七)。在完成放置後,需確保部件G和部件H上的OD26mm橡膠圈完全與前後軌道接觸,同時調整部件G和部件H中OD53mm滑輪之間的間距(圖一零八)。若是OD53mm滑輪之間的間距太大,前後天車在移動時會產生晃動;若是OD53mm滑輪之間的間距太小,會導致OD53mm滑輪與前後軌道磨損,影響前後天車在移動時的速度。
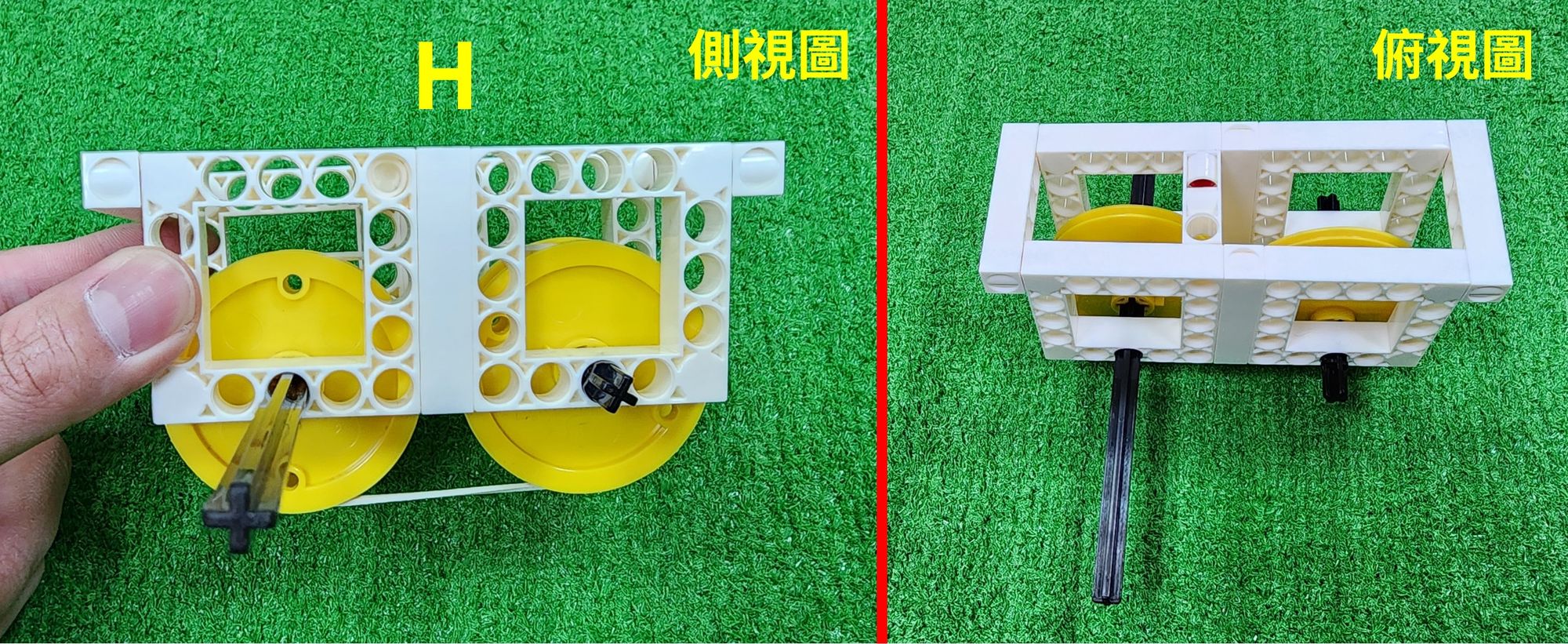
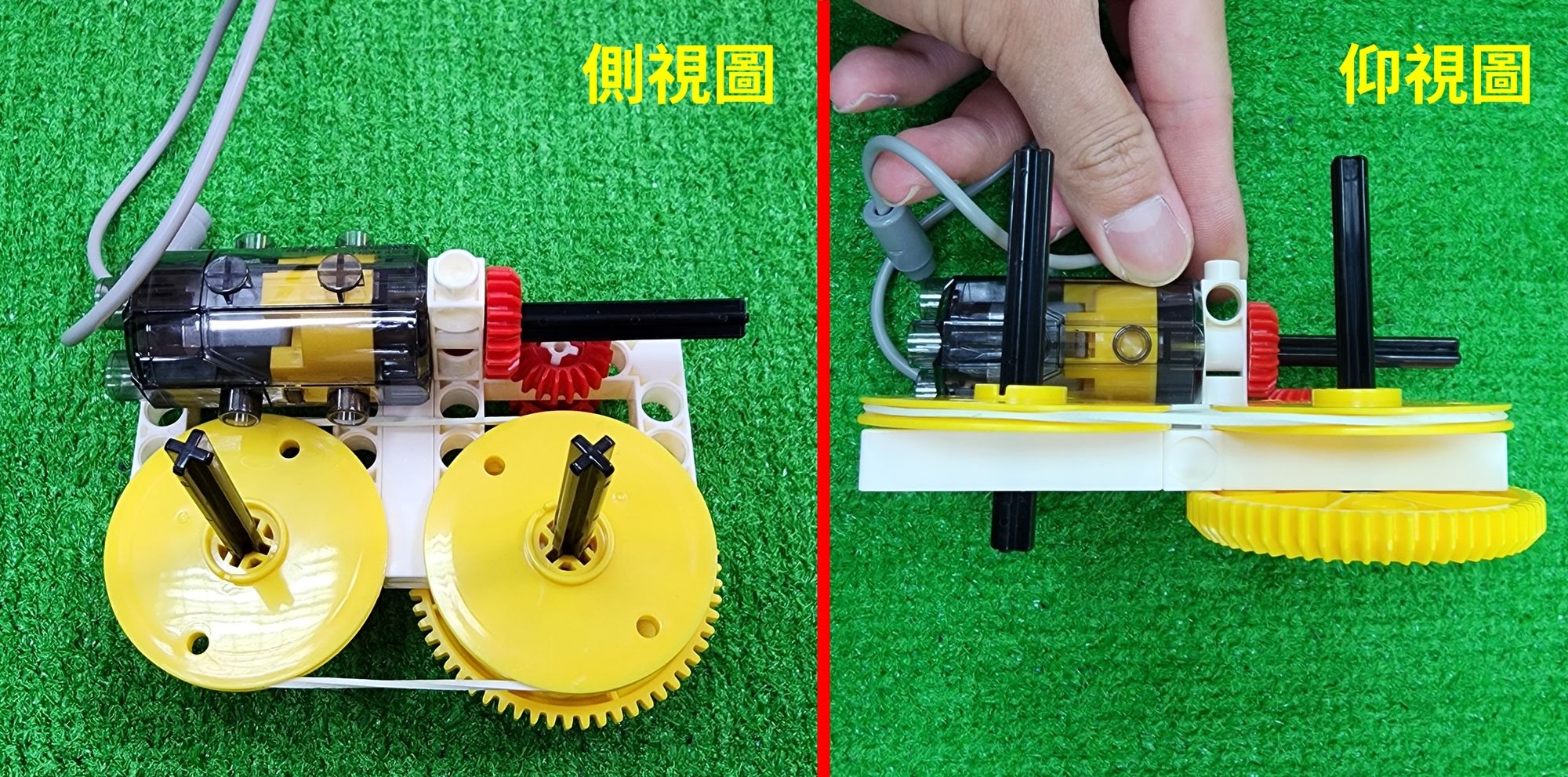
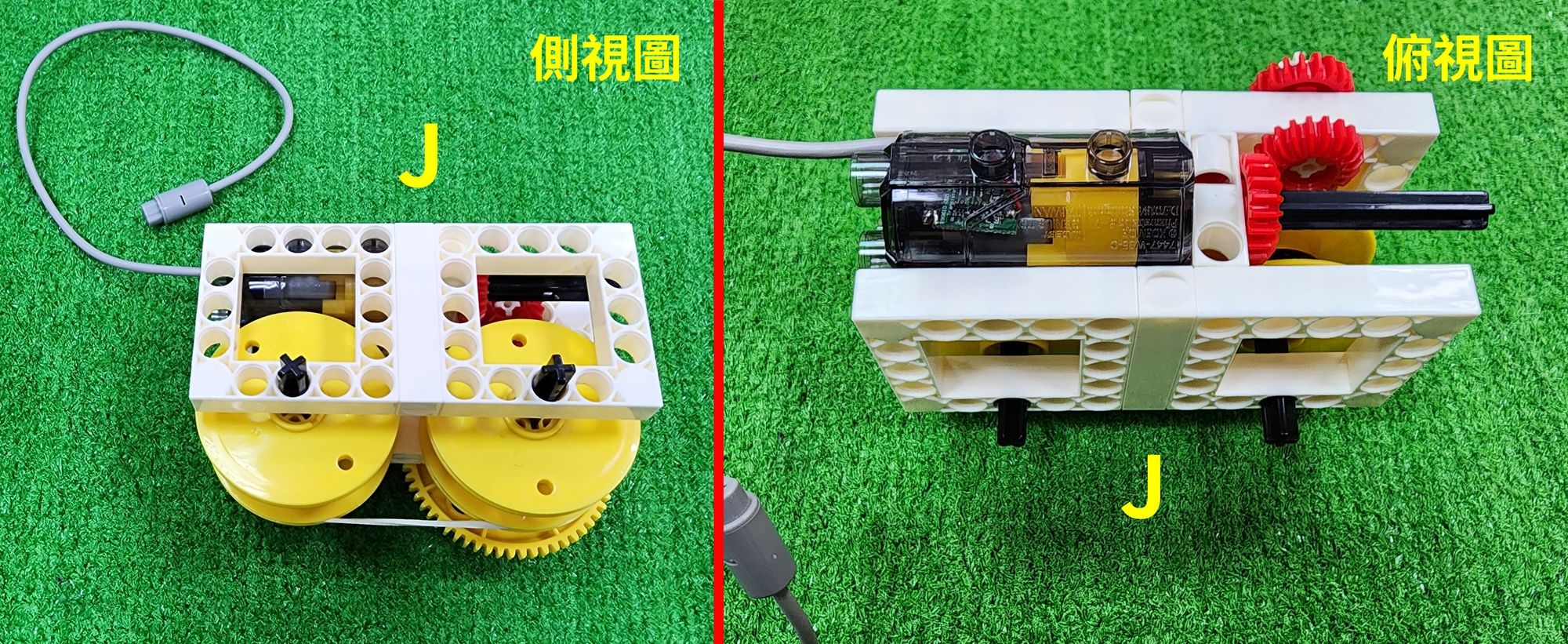
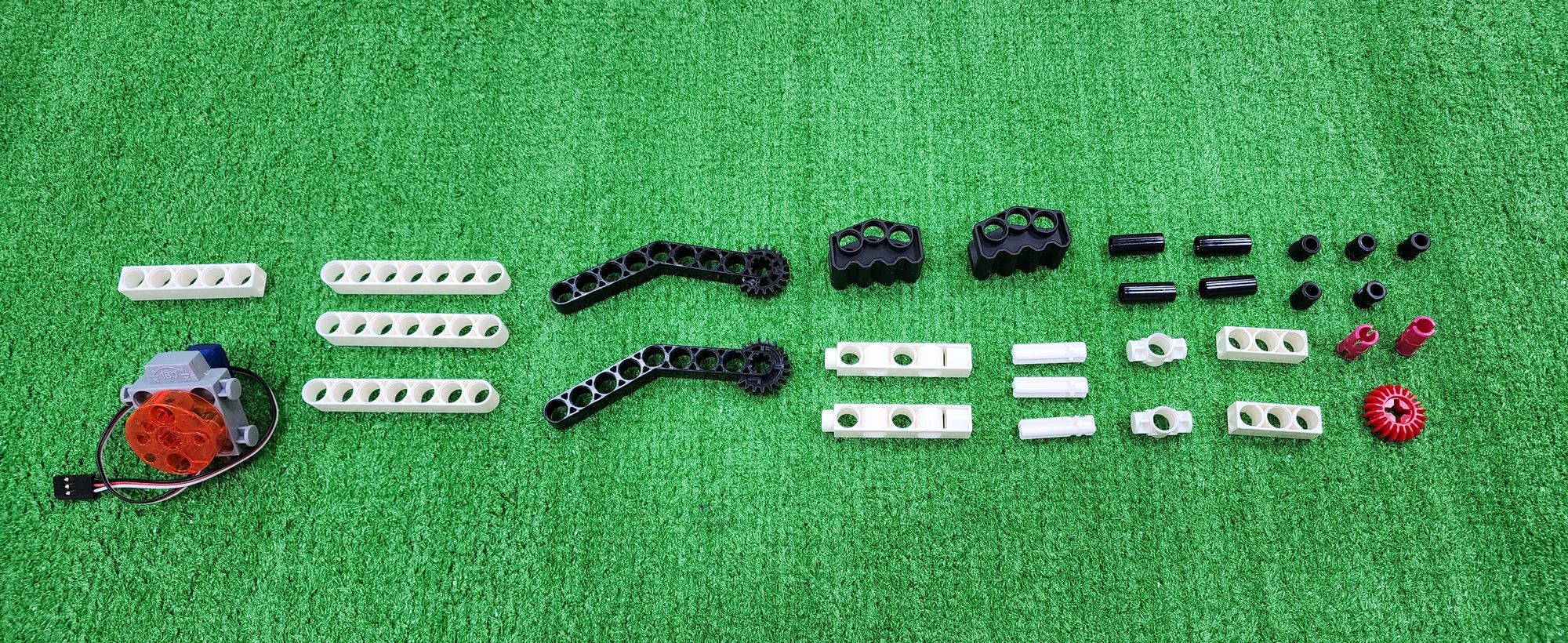
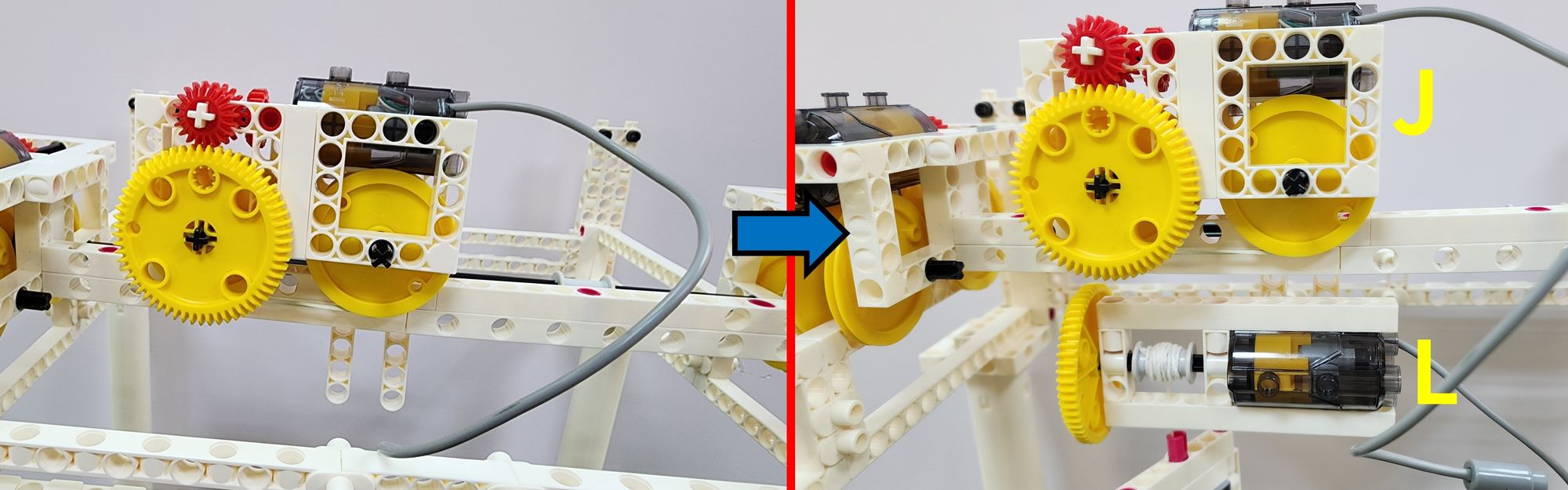
現在我們要來製做夾娃娃機的左右天車(部件J),左右天車會在左右軌道上方行走,讓夾娃娃機的夾爪能夠往左右方向移動,主要使用到5×5孔正方框、5孔長條、3孔超長條、70mmⅡ軸、27mm馬達短軸、20T齒輪、60T齒輪、OD53mm滑輪、OD23mm滑輪、OD26mm橡膠圈、長結合鍵、70mm橡皮筋以及50倍行星齒輪馬達盒(圖一零九)。
首先參考前面第十六步的流程完成兩個部件F(圖一一零),接著再參考第十七步到第十八步的流程,將50倍行星齒輪馬達盒安裝在部件F上(圖一一一)。

第三四步我們需要使用70mmⅡ軸以及60T齒輪,首先將60T齒輪安裝在70mmⅡ軸上(圖一一二),接著依照圖示將70mmⅡ軸插入部件F的孔洞(圖一一三)。

接下來我們需要使用到70mmⅡ軸、OD53mm滑輪、OD23mm滑輪、OD26mm橡膠圈以及70mm橡皮筋(圖一一四)。
第三五步我們需要使用70mmⅡ軸以及OD53mm滑輪,依照圖示將70mmⅡ軸插入部件F,接著在另一側各放上一個OD53mm滑輪(圖一一五)。
第三六步我們需要使用70mm橡皮筋,依照圖示將70mm橡皮筋套在兩個OD53mm滑輪的外側(圖一一六),並確保當其中一根70mmⅡ軸轉動時,另一根70mmⅡ軸也要跟著轉動。
第三七步需要使用OD23mm滑輪和OD26mm橡膠圈,將OD26mm橡膠圈套在OD23mm滑輪外圍(圖一一七),並依照圖示將OD23mm滑輪安裝在70mmⅡ軸上(圖一一八)。

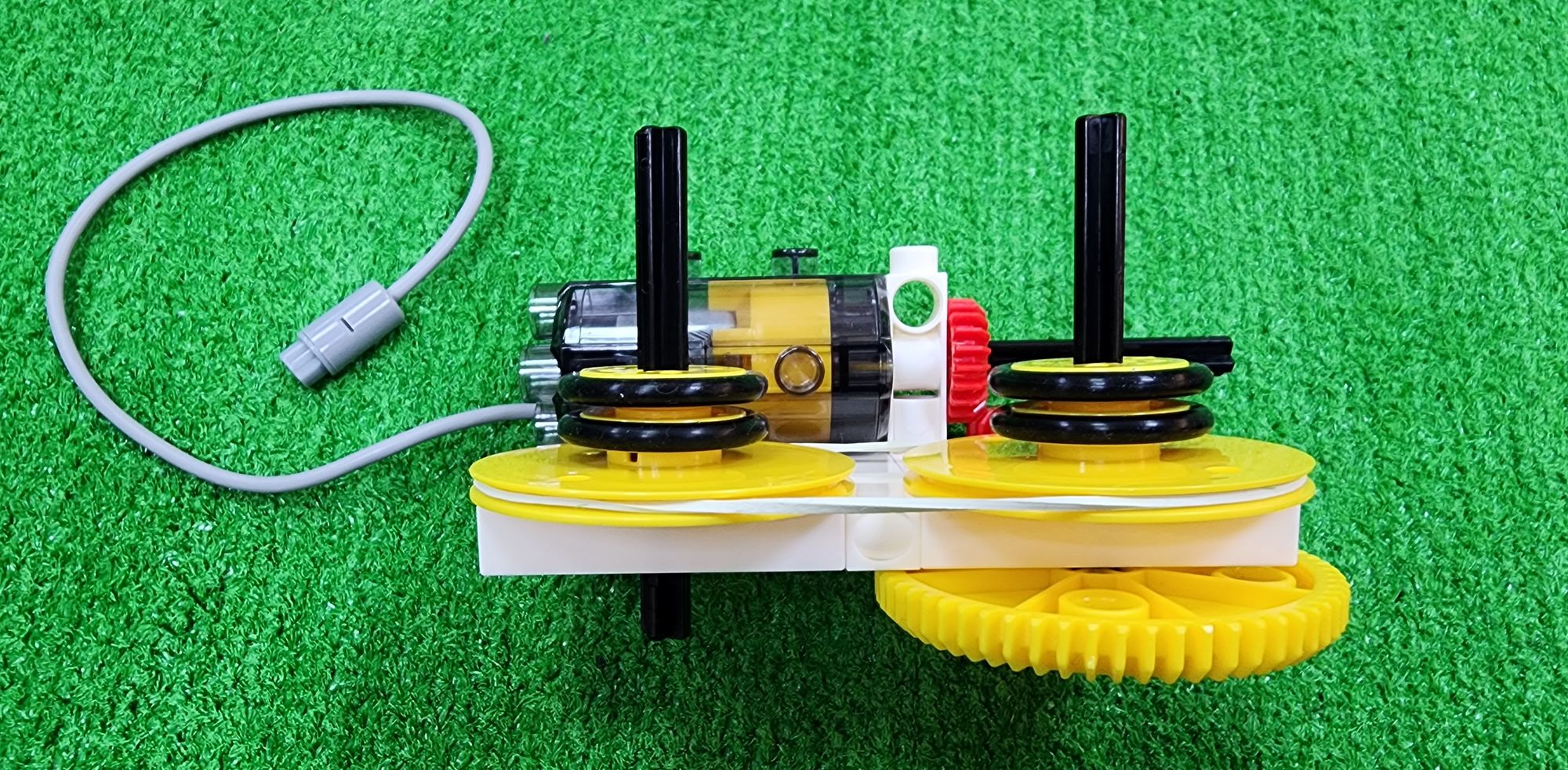
第三八步需要使用OD53mm滑輪,依照圖示將OD53mm滑輪安裝在70mmⅡ軸上(圖一一九),這樣左右天車(部件J)的製作就完成囉(圖一二零)。

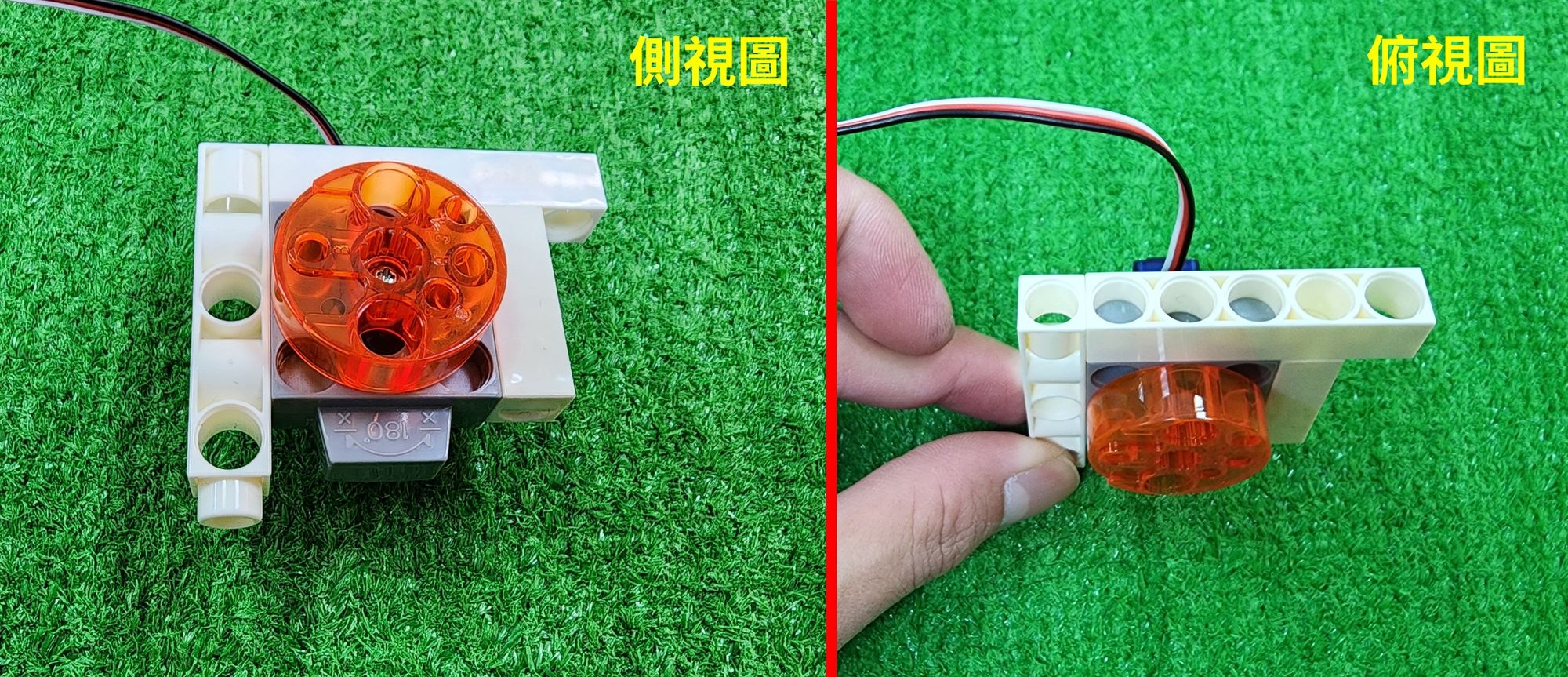
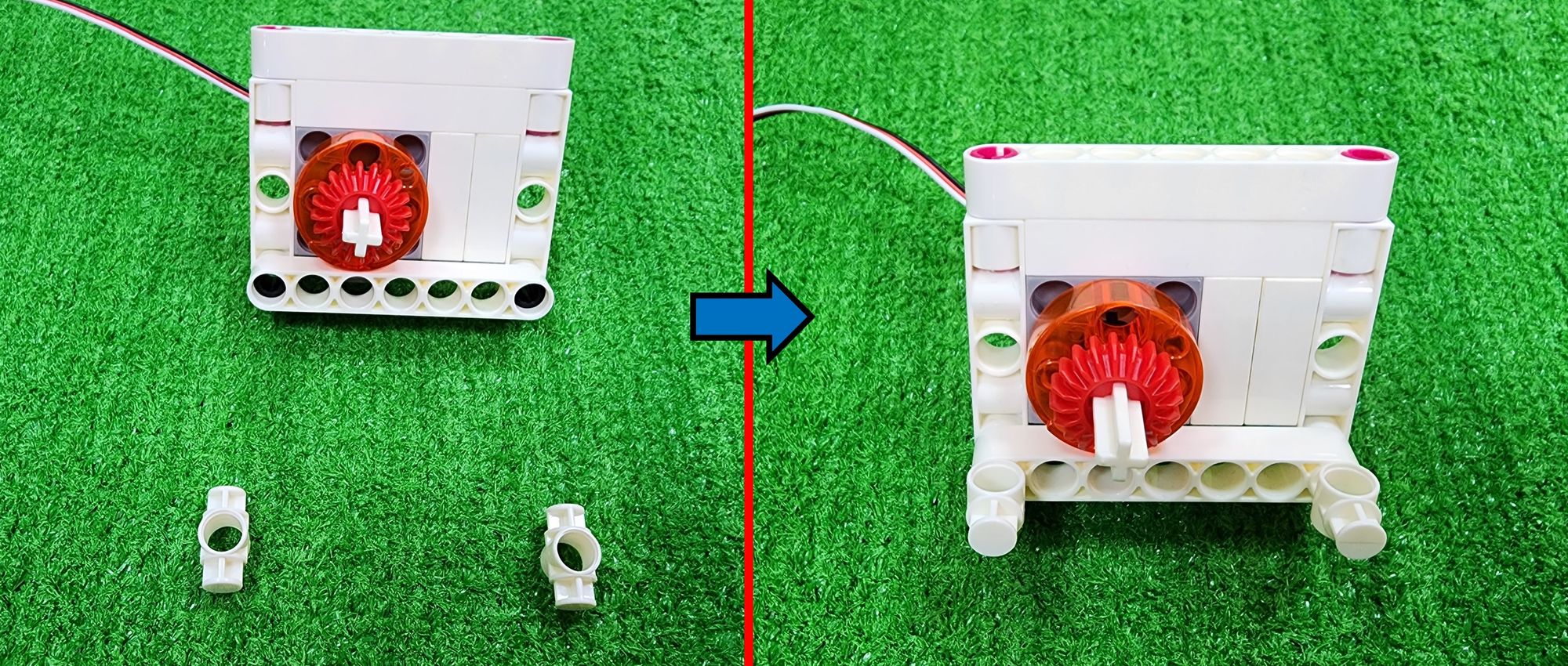
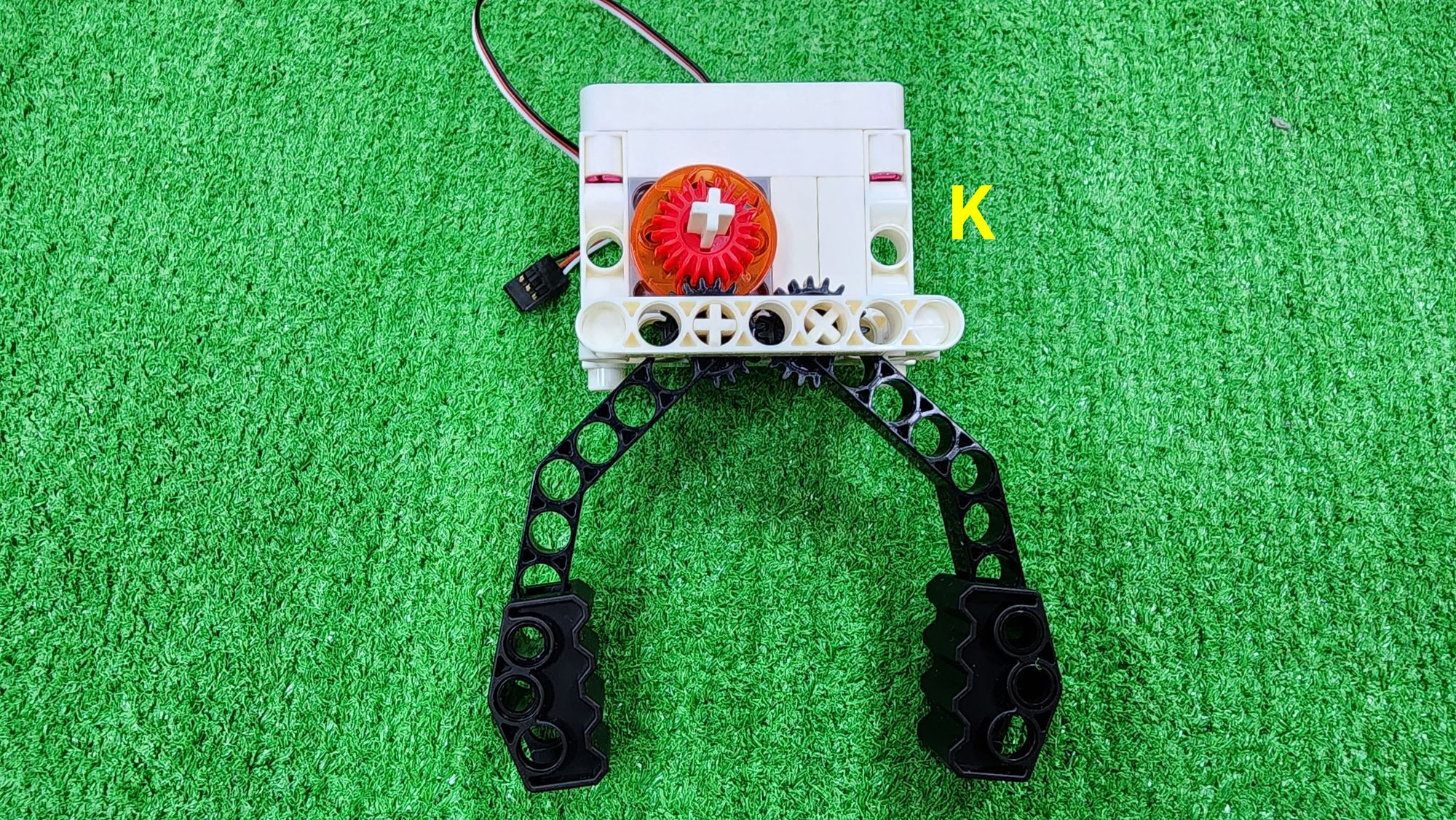
現在我們要來製做夾娃娃機的夾爪(部件K),夾爪能夠透過180度角度金屬伺服馬達進行開合,達到夾取物品的功能,主要使用到7孔圓角長條、6孔爪形長條(7411-W10-G1D)、5孔超長條、5孔長條、3孔長條、27mm馬達短軸、145度齒輪曲軸-A(7411-W10-C1D)、145度齒輪曲軸-B(7411-W10-C2D)、20T齒輪、20mm圓管(7400-W10-G2D)、短結合鍵、栓扣鍵、2凸單孔轉向結合器(7430-W10-B1W)以及180度角度金屬伺服馬達(圖一二一)。
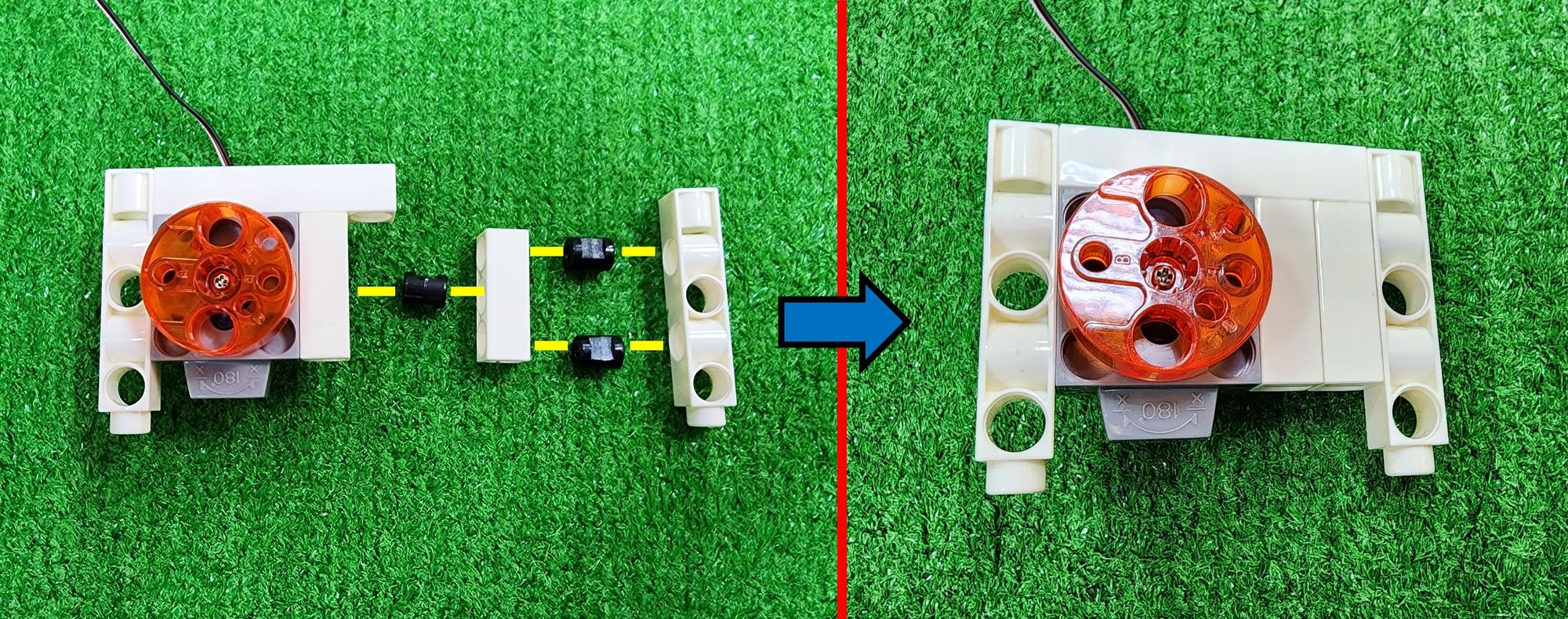
第三九步我們需要使用180度角度金屬伺服馬達、5孔超長條、5孔長條以及3孔長條,依照圖示將各個長條安裝在180度角度金屬伺服馬達上(圖一二二)。
第四十步我們需要使用5孔超長條、3孔長條以及短結合鍵,使用短結合鍵連接5孔超長條以及3孔長條,接著使用短結合鍵將它們安裝在3孔長條上(圖一二三)。
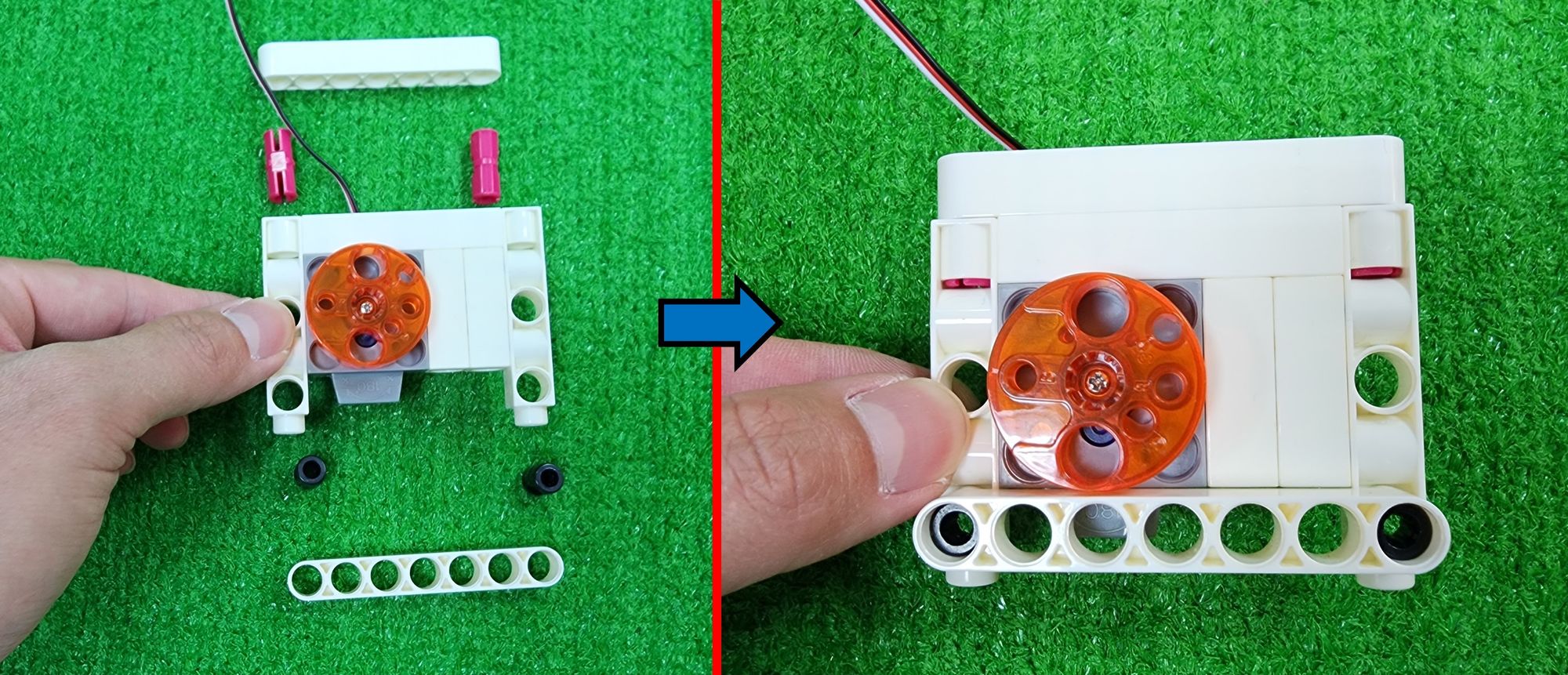
第四一步我們需要使用7孔圓角長條、栓扣鍵以及短結合鍵,依照圖示使用栓扣鍵以及短結合鍵將7孔圓角長條固定在夾爪上,進行基礎的結構加固(圖一二四)。
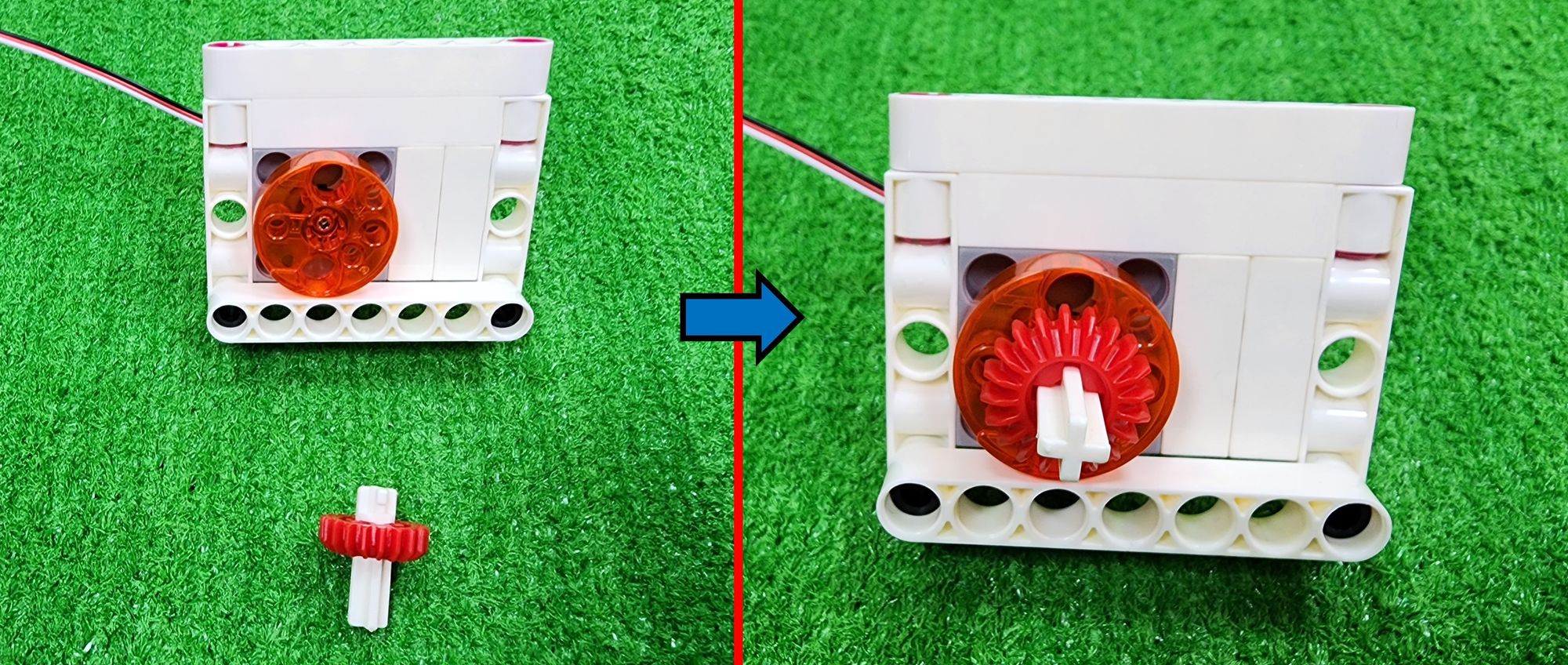
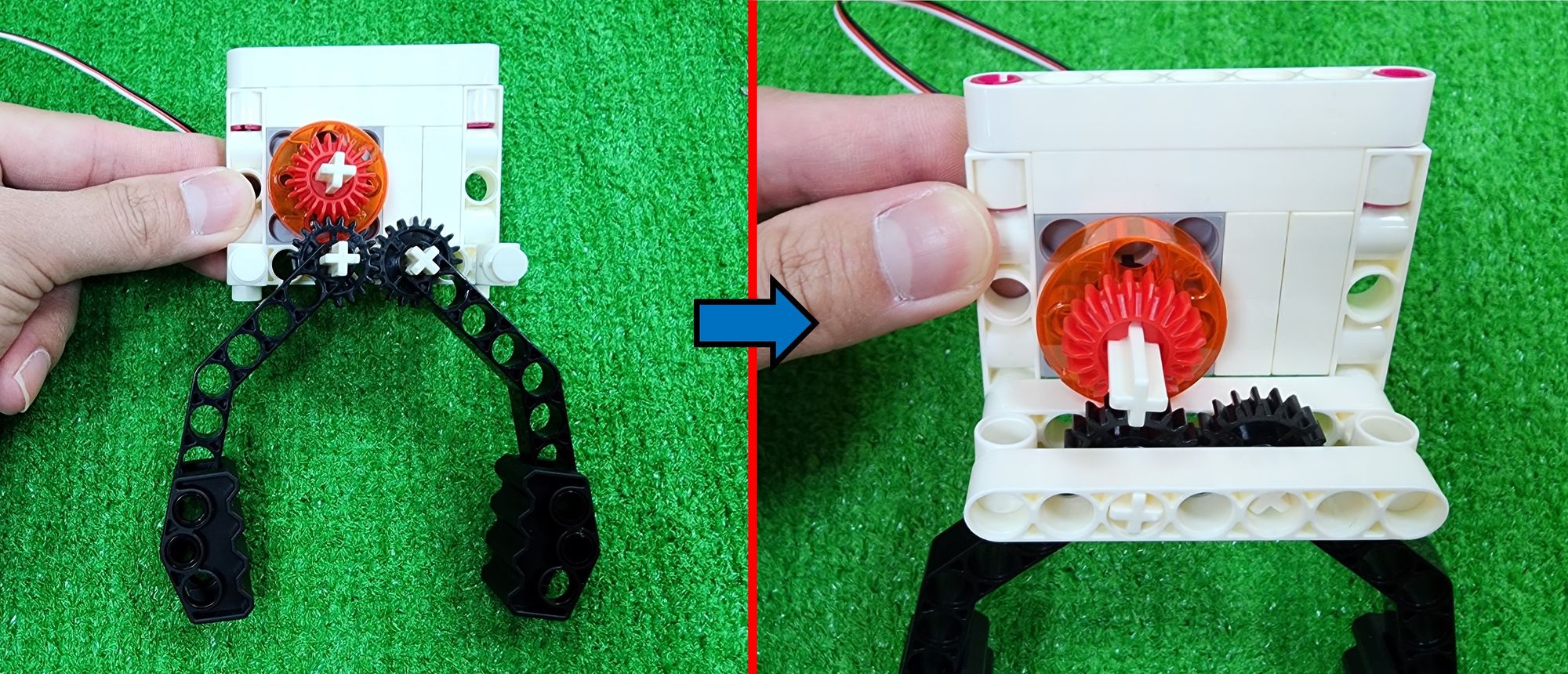
第四二步我們需要使用27mm馬達短軸、20T齒輪以及2凸單孔轉向結合器,首先將穿過20T齒輪的27mm馬達短軸插入180度角度金屬伺服馬達(圖一二五),接著再依照圖示將2凸單孔轉向結合器安裝在夾爪上(圖一二六)。
第四三步我們需要使用27mm馬達短軸、145度齒輪曲軸-A(7411-W10-C1D)、145度齒輪曲軸-B(7411-W10-C2D)、6孔爪形長條(7411-W10-G1D)以及20mm圓管(7400-W10-G2D),首先將27mm馬達短軸和20mm圓管分別穿過145度齒輪曲軸-A以及145度齒輪曲軸-B,接著再依照圖示將6孔爪形長條安裝在20mm圓管上(圖一二七)。

第四四步我們需要使用7孔圓角長條,首先依照圖示將145度齒輪曲軸-A和145度齒輪曲軸-B的27mm馬達短軸安裝在夾爪上,確認20T齒輪、145度齒輪曲軸-A以及145度齒輪曲軸-B三個零件之間彼此嚙合後,再將7孔圓角長條安裝在夾爪上(圖一二八),完成夾爪(部件K)的製作(圖一二九)。
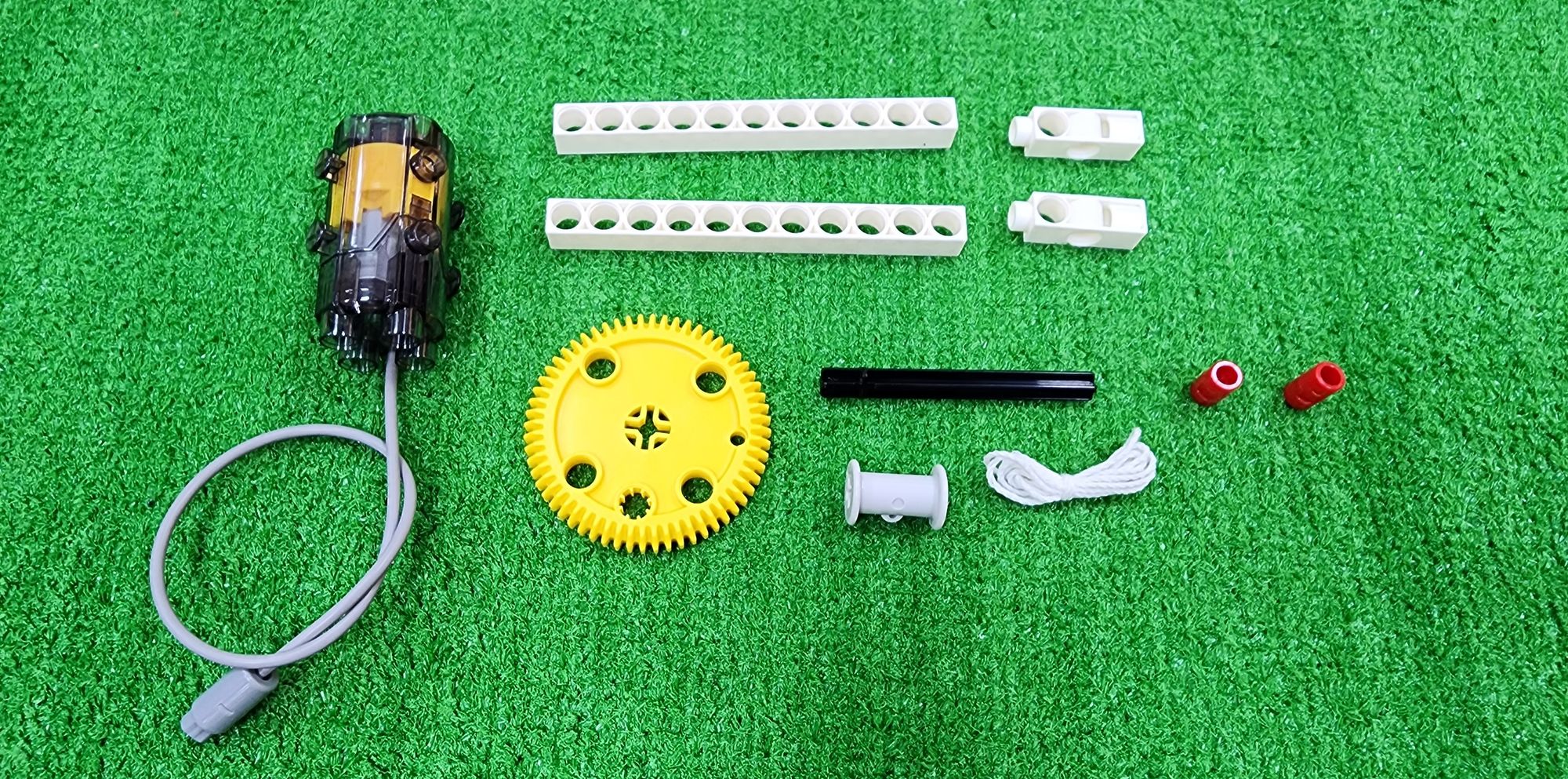
現在我們要來製做夾娃娃機的捲線裝置(部件L),捲線裝置能夠透過50倍行星齒輪馬達盒的轉動來改變夾爪的高度,讓夾娃娃機的夾爪能夠往上下方向移動,主要使用到11孔長條、3孔超長條、70mmⅡ軸、60T齒輪、捲線器、長結合鍵、棉繩以及50倍行星齒輪馬達盒(圖一三零)。
第四五步我們先依照圖示將70mmⅡ軸插入50倍行星齒輪馬達盒,並套入一個裝有長結合鍵的3孔超長條(圖一三一)。
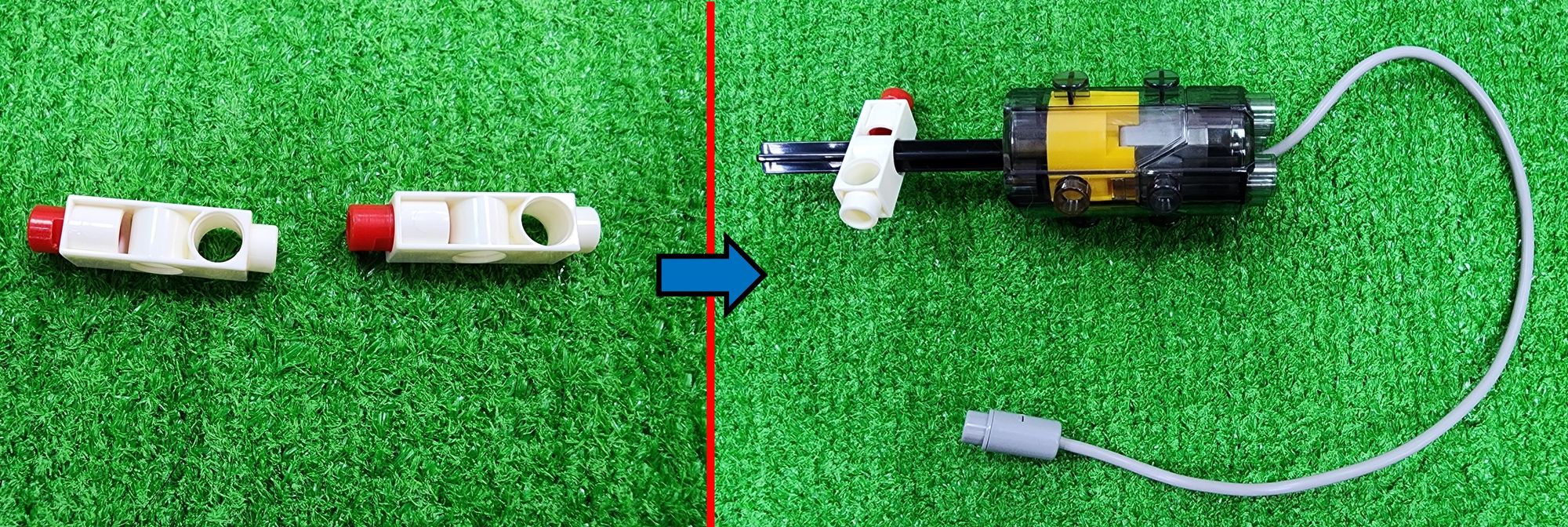
第四六步我們需要依序將捲線器以及一個裝有長結合鍵的3孔超長條套入70mmⅡ軸,接著使用11孔長條進行加固,最後再將60T齒輪插入70mmⅡ軸(圖一三二)。
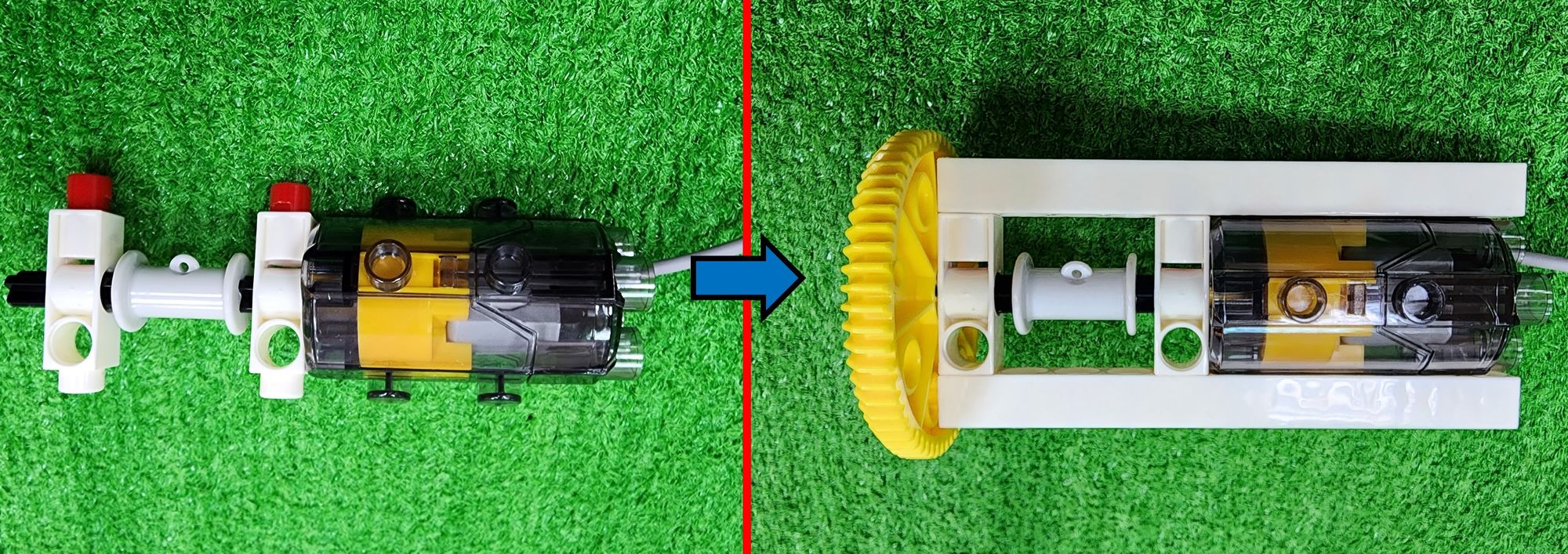
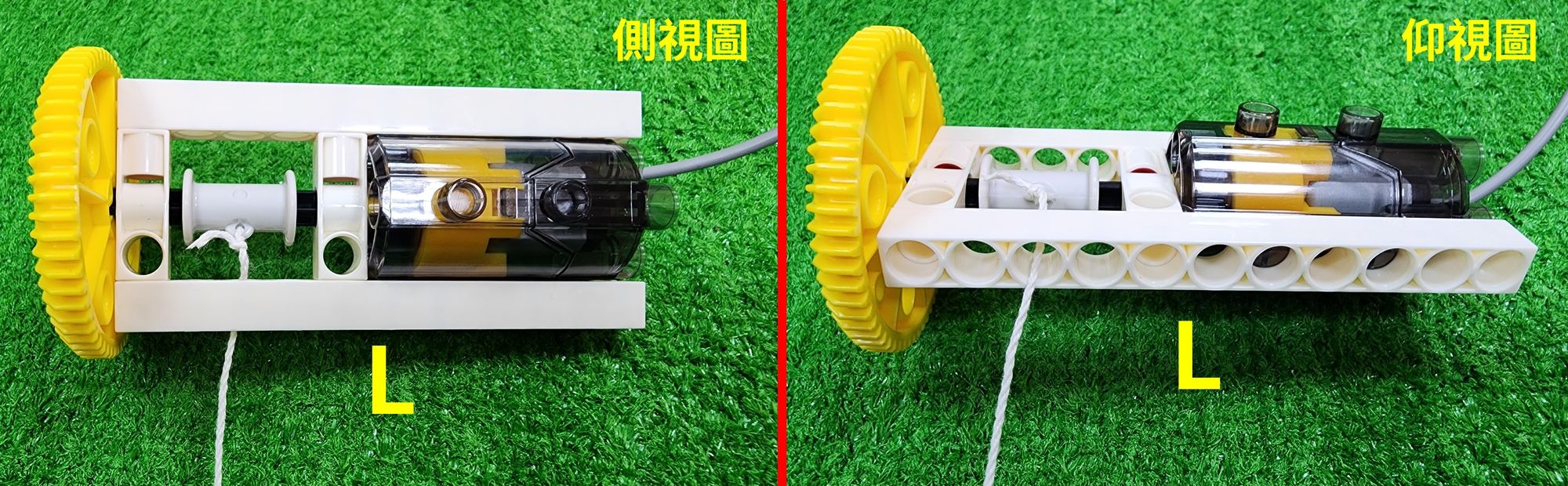
第四七步我們要使用到棉繩,將棉繩的一端綁在捲線器的孔洞上,並確保棉繩的另一端穿過11孔長條的孔洞,完成捲線裝置(部件L)的製作(圖一三三)。
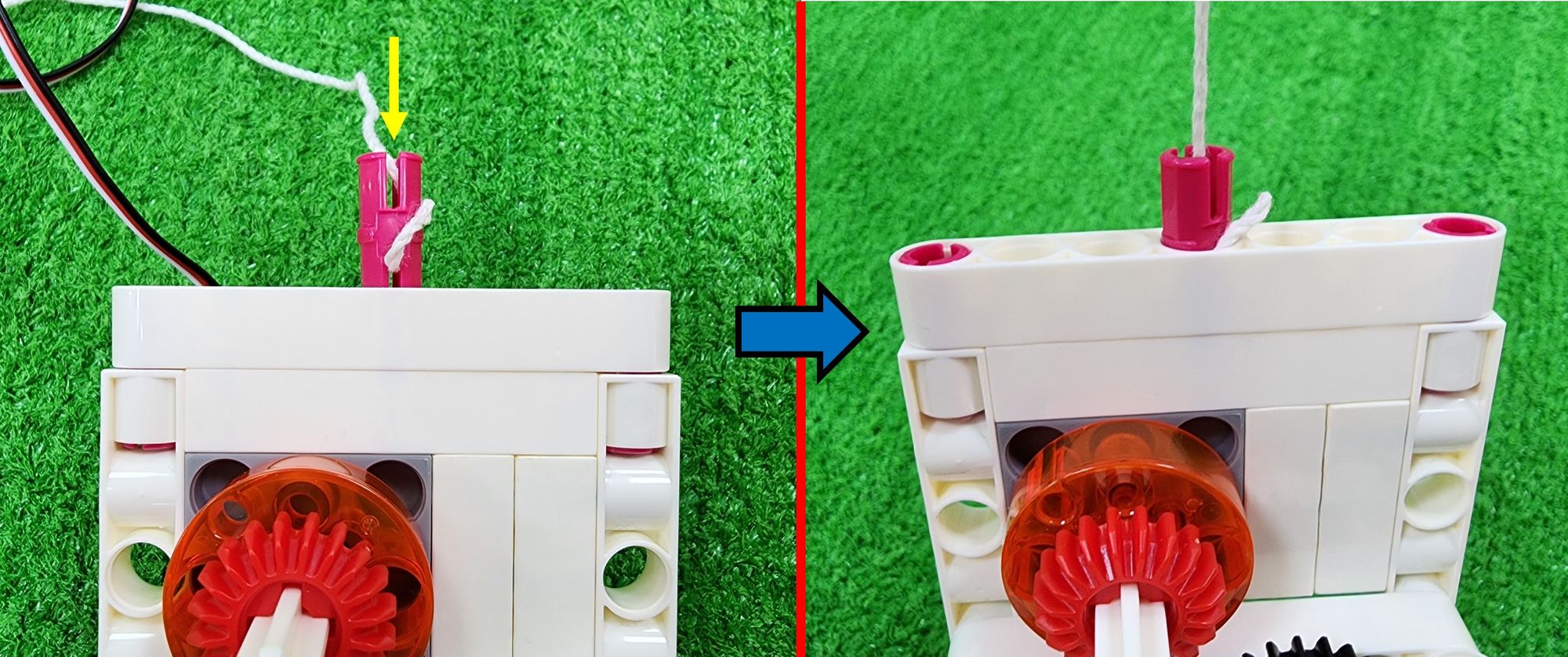
第四八步我們要將夾爪(部件K)以及捲線裝置(部件L)結合,需要使用到一個栓扣鍵(圖一三四)。
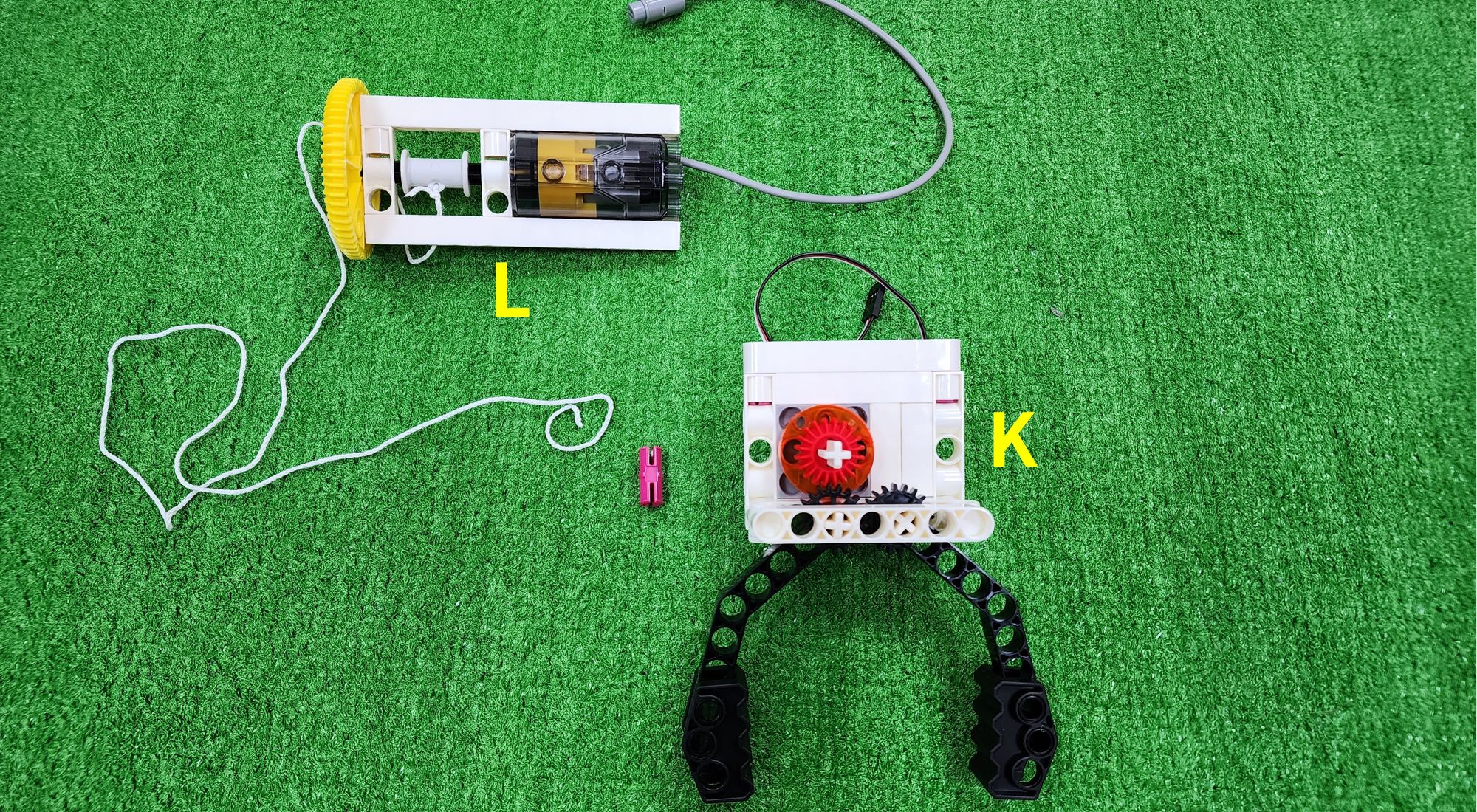
首先將棉繩的一端套入栓扣鍵下方的凹槽,並預留一小段長度(圖一三五),接著依照圖示將栓扣鍵安裝在夾爪的上方(圖一三六),最後可以轉動60T齒輪,透過捲線器將棉繩收起來,完成夾爪(部件K)以及捲線裝置(部件L)的結合(圖一三七)。

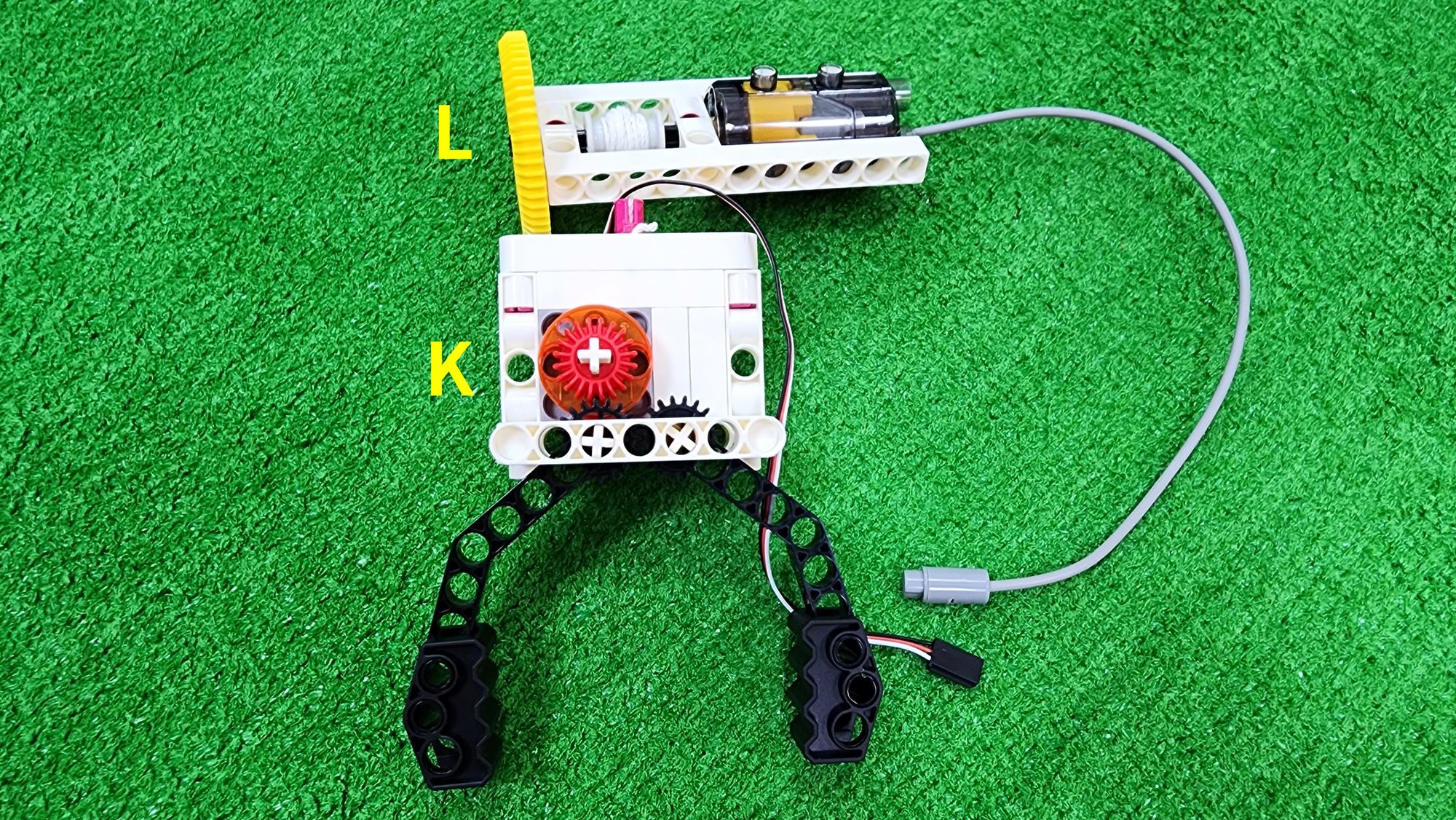
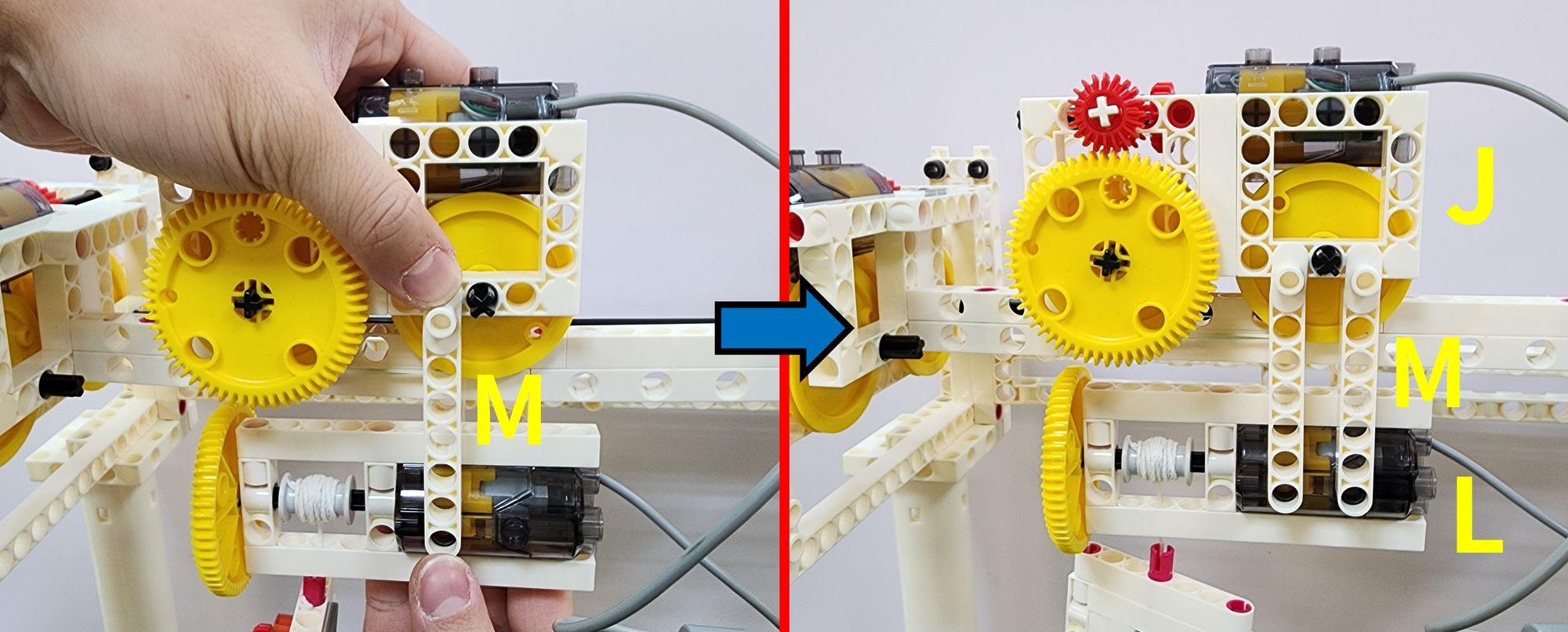
現在我們要將左右天車(部件J)以及捲線裝置(部件L)結合,需要使用到7孔圓角長條以及二合一結合鍵(圖一三八)。
第四九步需要將7孔圓角長條以及二合一結合鍵結合,完成四個部件M的製作(圖一三九),接著依照圖示將兩個部件M安裝在左右天車(部件J)的後方(圖一四零)。

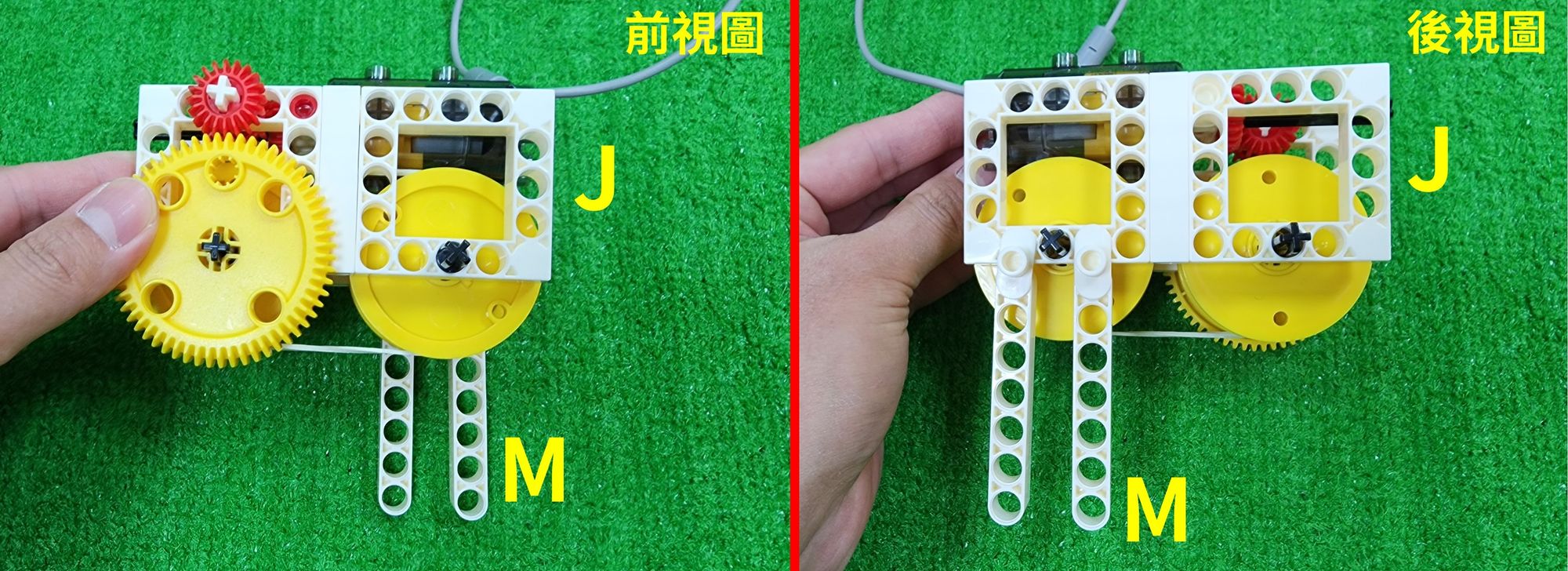
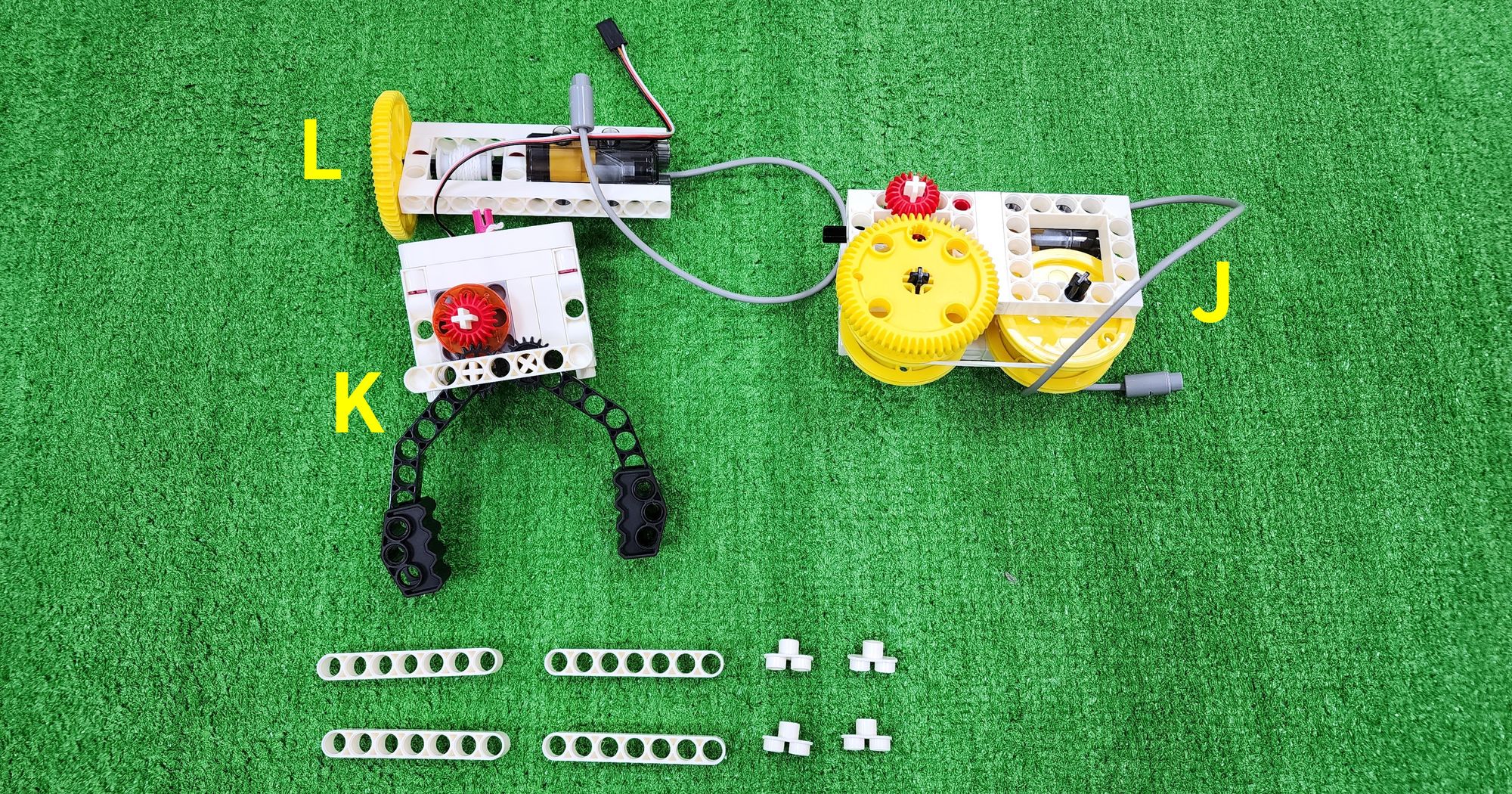
第五十步需要將左右天車(部件J)放置在左右軌道(部件I)的上方,同樣需確保左右天車的OD26mm橡膠圈完全與左右軌道接觸,並調整左右天車(部件J)中OD53mm滑輪之間的間距(可參考第三三步),接著依照圖示將捲線裝置(部件L)與左右天車(部件J)上的7孔圓角長條結合(圖一四一)。
第五一步我們需要使用剩餘的兩個部件M來連接左右天車(部件J)以及捲線裝置(部件L)(圖一四二),完成左右天車(部件J)、夾爪(部件K)以及捲線裝置(部件L)的設置(圖一四三)。
現在我們要來製做夾娃娃機的取物閘門,主要使用到11孔長條、5孔超長條、5孔長條、3孔超長條、3孔1/4弧長條、150mmⅠ軸、短結合鍵、軸固定鍵、以及2凸單孔轉向結合器(圖一四四)。
第五二步我們需要使用到11孔長條以及3孔超長條,依照圖示將它們結合,完成部件N的製作(圖一四五)。

第五三步我們需要使用到11孔長條以及短結合鍵,依照圖示將它們結合,完成兩個部件O的製作(圖一四六)。
第五四步我們需要使用到5孔超長條、2凸單孔轉向結合器以及短結合鍵,依照圖示將它們結合,完成兩個部件P的製作(圖一四七)。

第五五步需要依照圖示將兩個部件O以及一個部件P結合,我們將這個新完成的部件定義為部件Q(圖一四八)。
第五六步需要使用到部件N、部件Q以及短結合鍵,依照圖示將它們結合,完成部件R的製作(圖一四九)。
第五七步需要使用到3孔1/4弧長條以及短結合鍵,依照圖示將它們結合,完成部件S的製作(圖一五零)。接著將部件S安裝在先前完成的部件R上(圖一五一)。
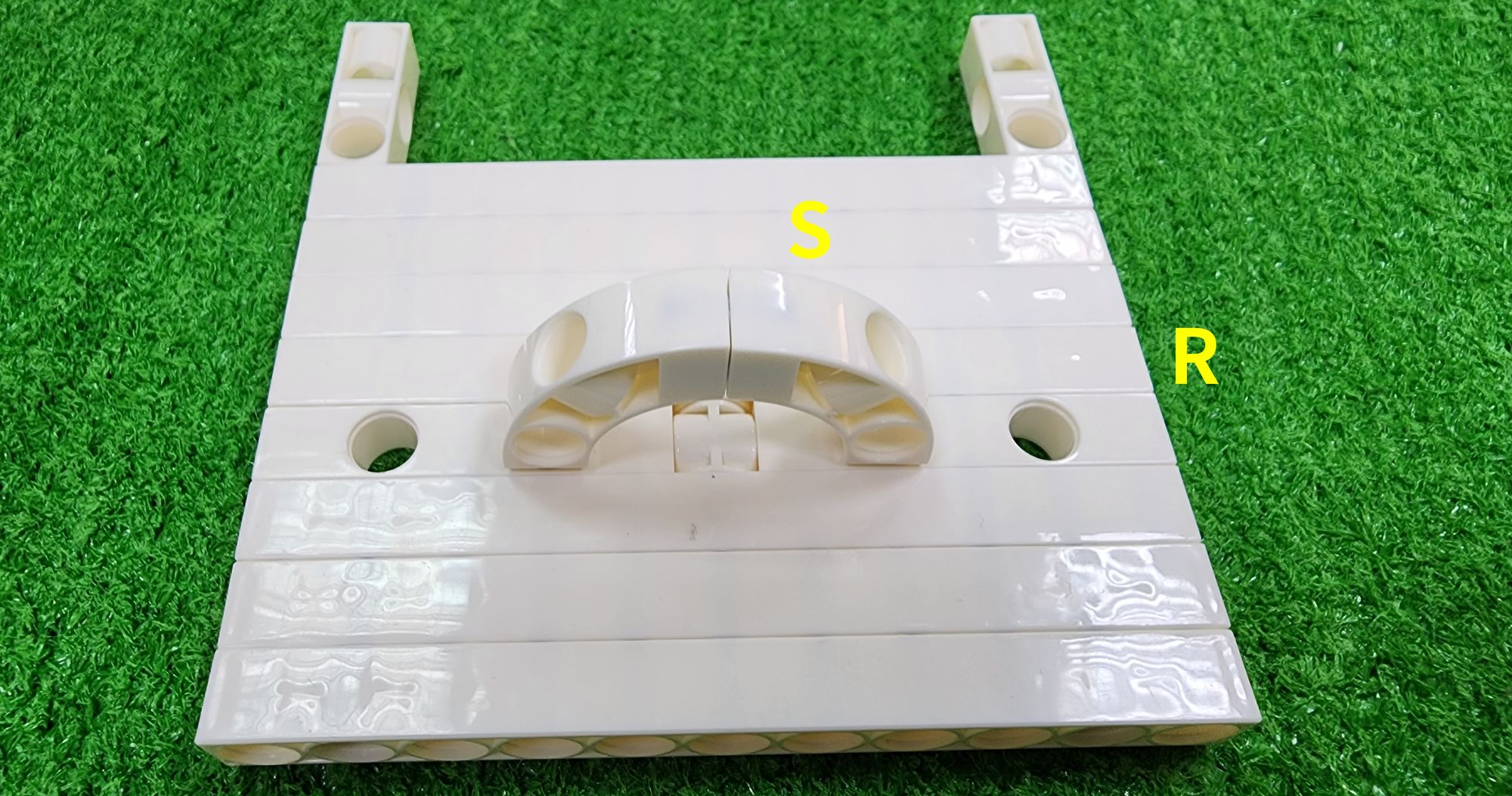
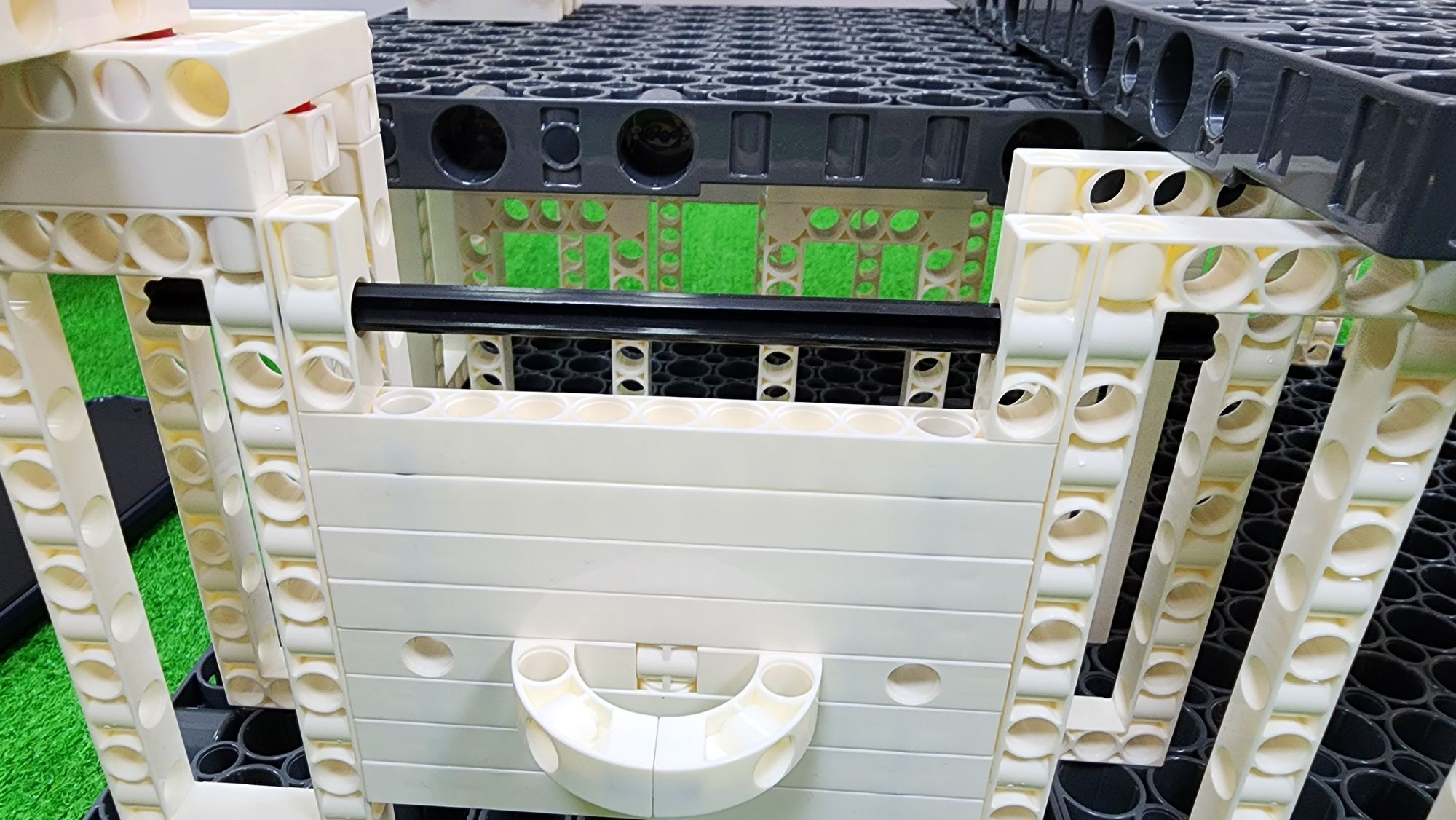
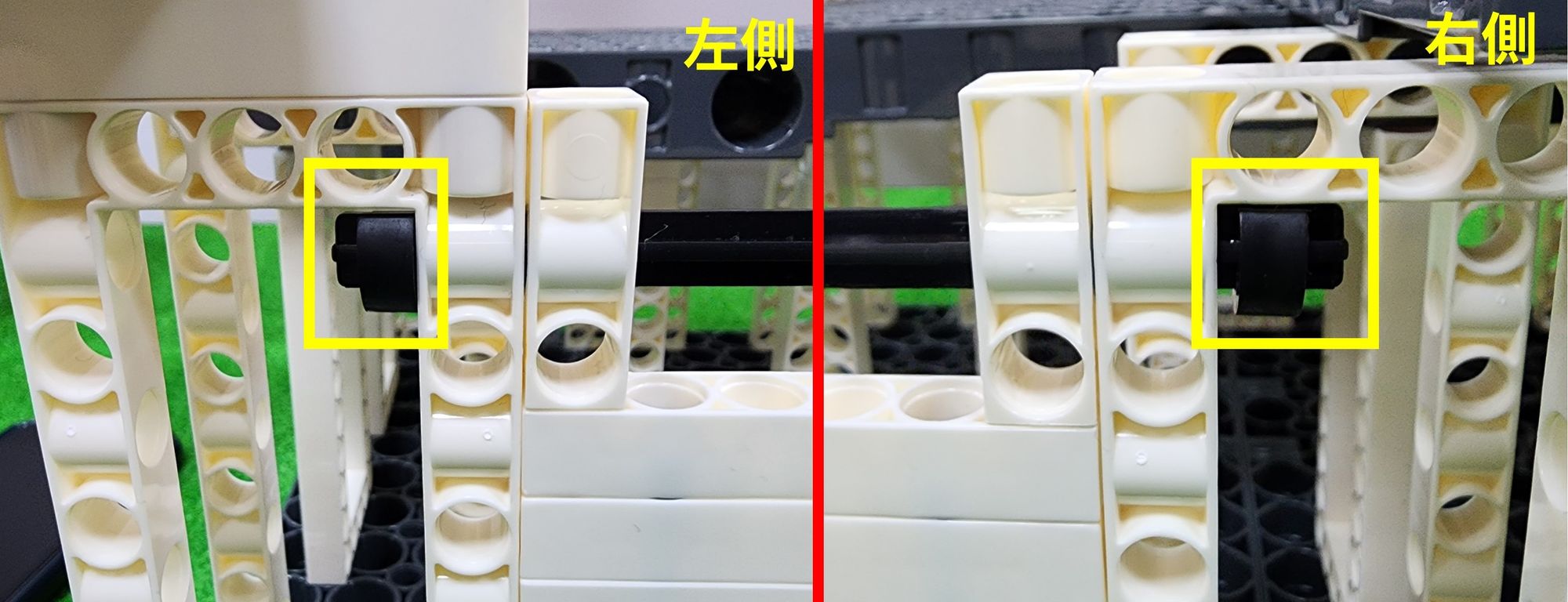
第五八步需要使用到150mmⅠ軸以及軸固定鍵,我們要將取物閘門和夾娃娃機結合,首先依照圖示將部件R放置在兩個5×13孔超長方框之間,接著將150mmⅠ軸穿過取物閘門以及兩個5×13孔超長方框(圖一五二),最後將軸固定鍵安裝在150mmⅠ軸的兩側(圖一五三),如此一來就完成取物閘門的製作囉。
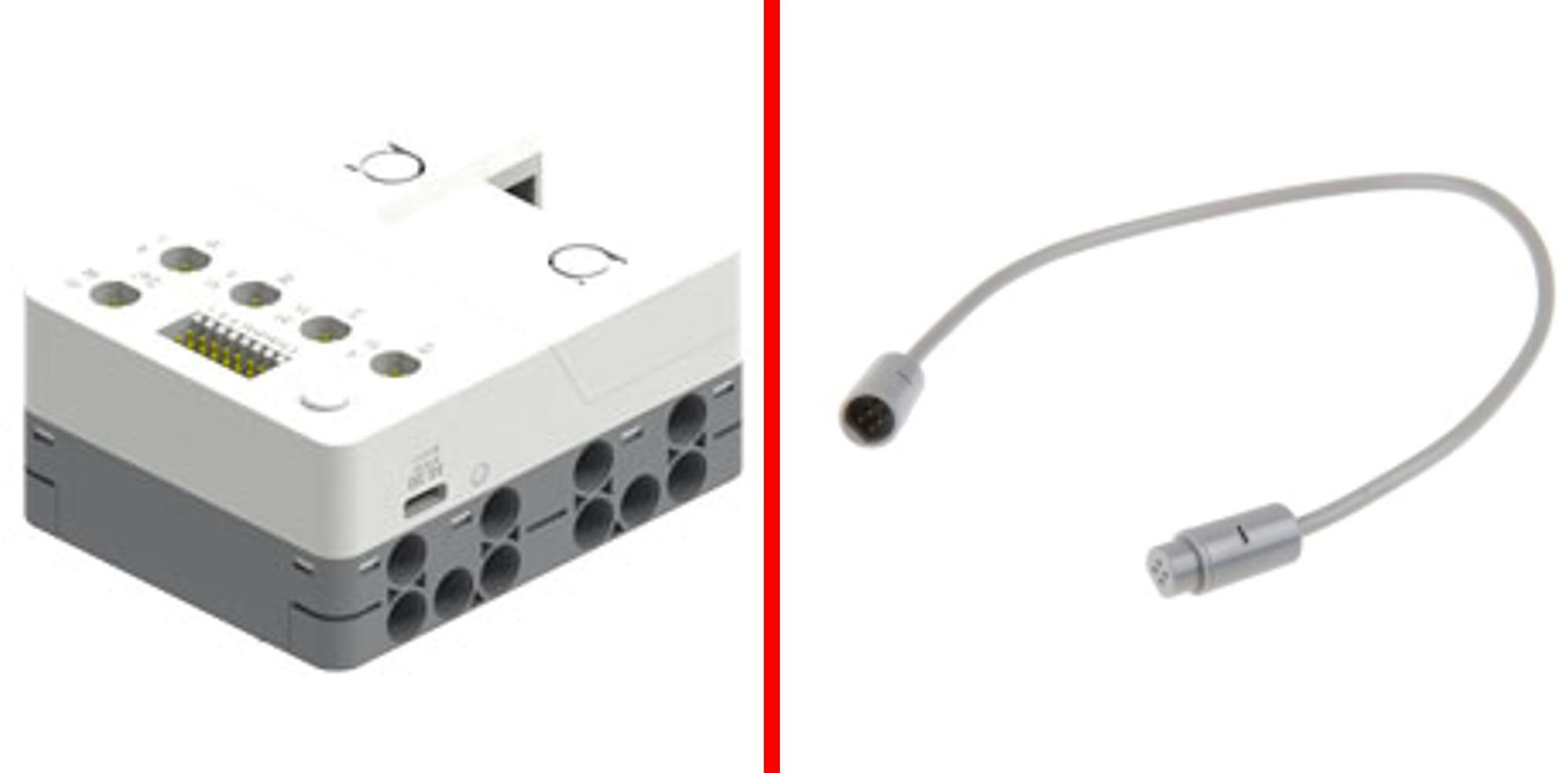
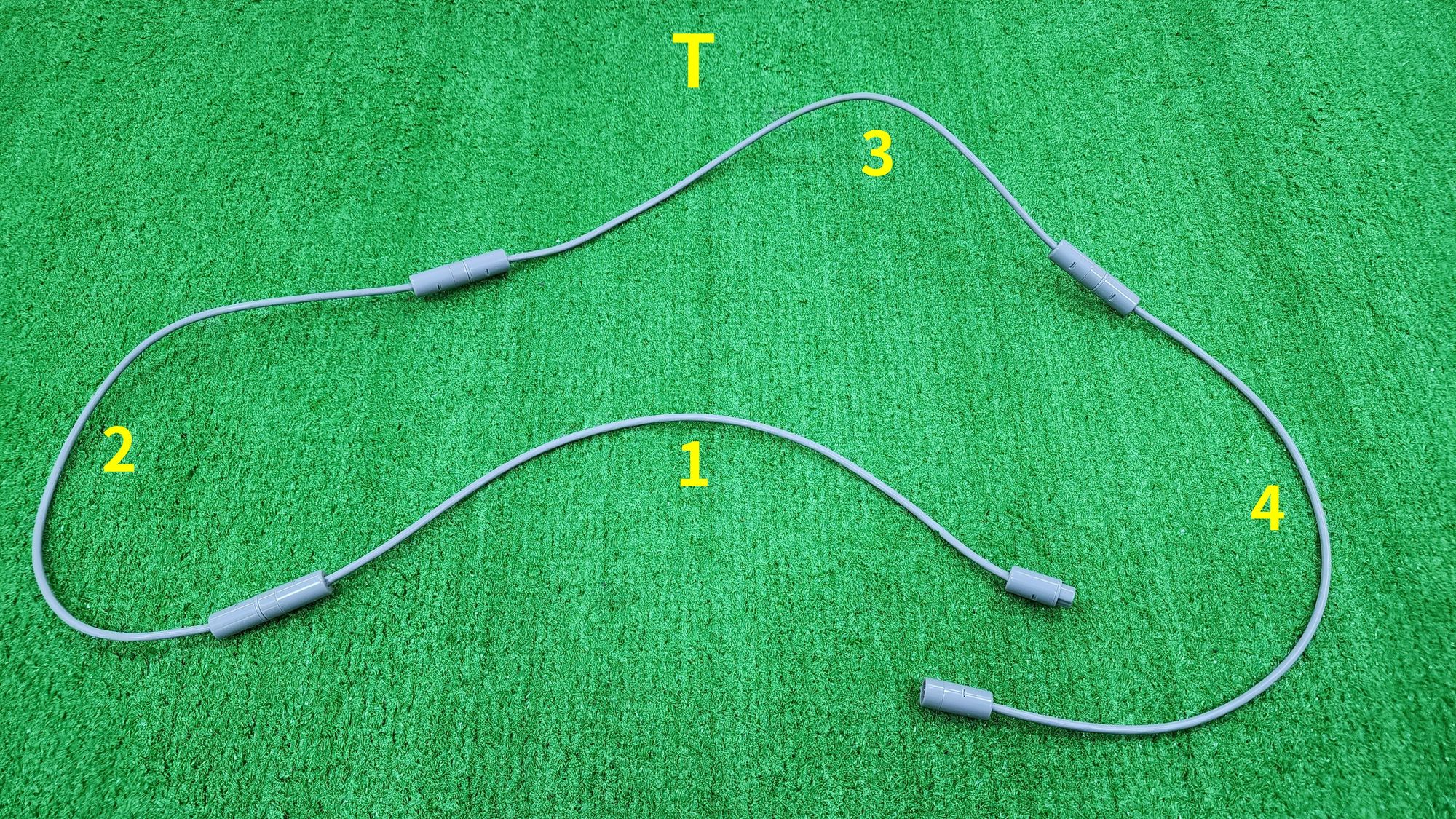
現在我們要來進行夾娃娃機的配線,需要使用到延長線(1246-W85-D)以及智高#1409套組中的micro:bit 智能主控盒(1409-W85-A)(圖一五四)。在進行配線前,浣熊老師要先教大家如何分辨延長線的公頭與母頭(圖一五五),公頭的外形通常是凸出的;母頭的外形則是凹陷的,當我們在安裝延長線時,會將它們的公頭與母頭對接,以達到延伸電線的目的(圖一五六),現在就讓我們來安裝延長線吧。


第五九步需要將四條延長線的公頭與母頭對接,我們將這個四條的延長線組合稱為部件T(圖一五七)。
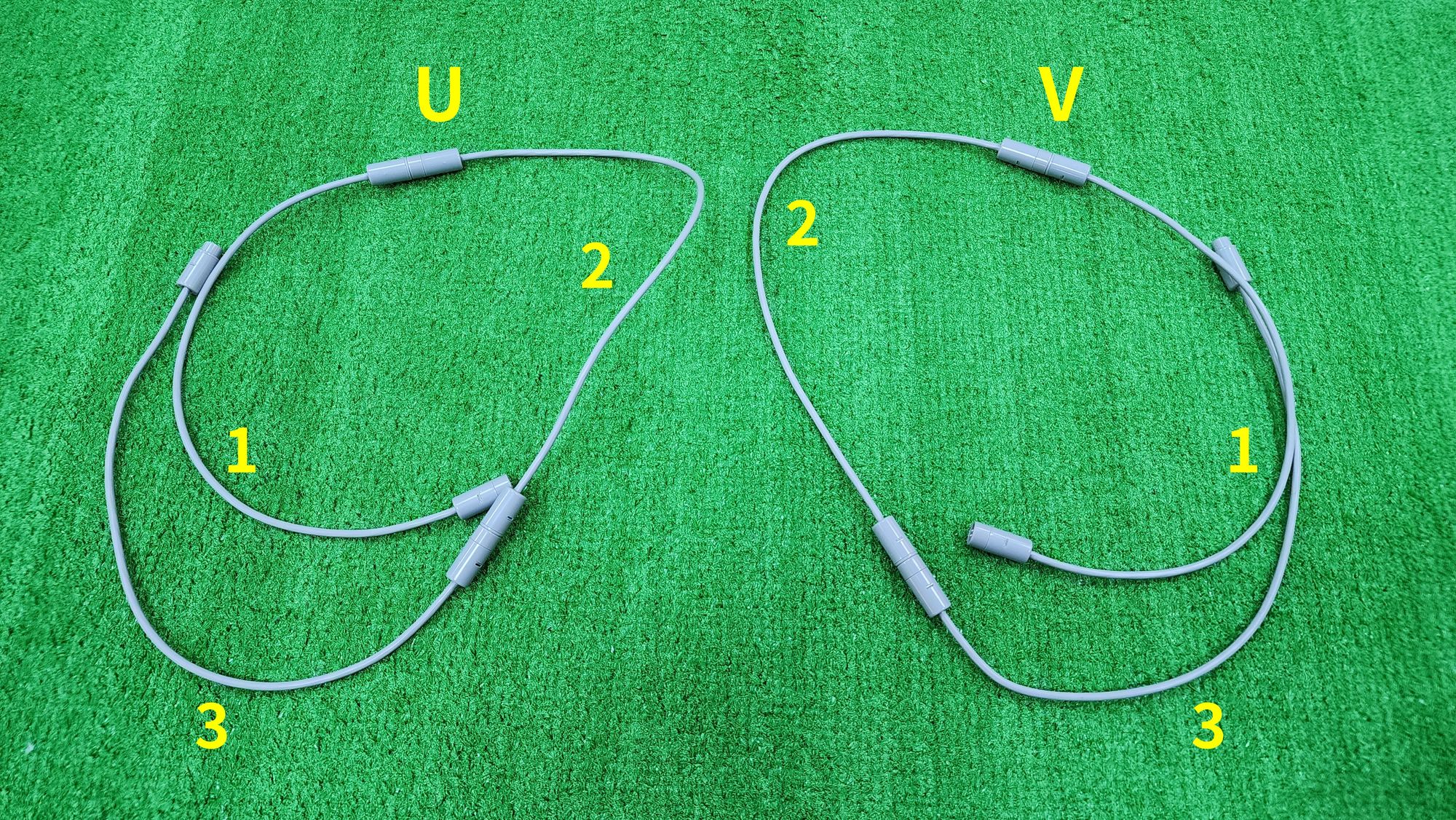
第六十步需要將三條延長線的公頭與母頭對接,一共需要製作兩組,我們分別將這三條的延長線組合稱為部件U以及部件V(圖一五八)。
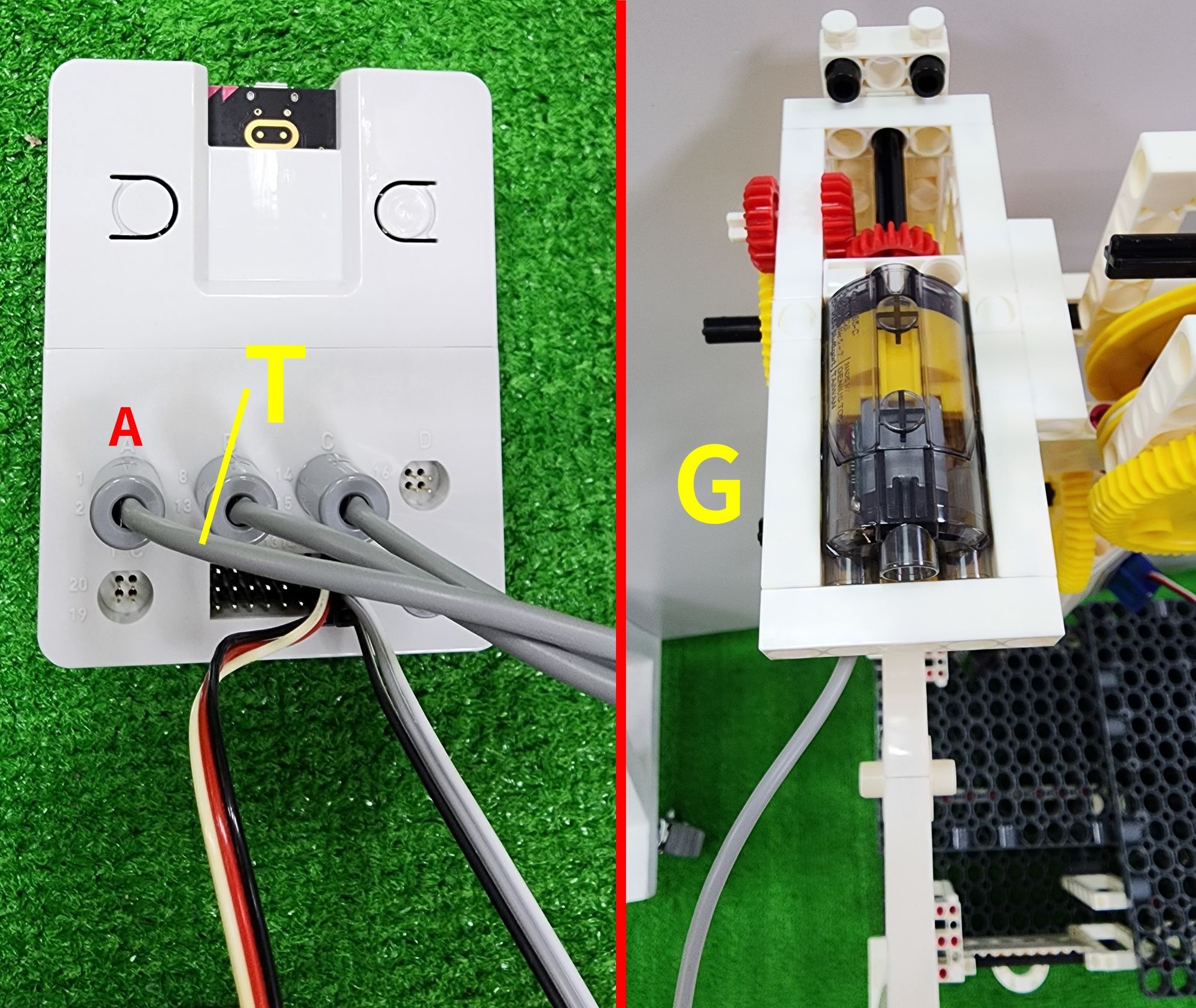
第六一步我們要進行前後天車的配線,首先將部件T的公頭與micro:bit 智能主控盒的腳位A對接,接著再將部件T的母頭與部件G中50倍行星齒輪馬達盒的公頭對接(圖一五九)。
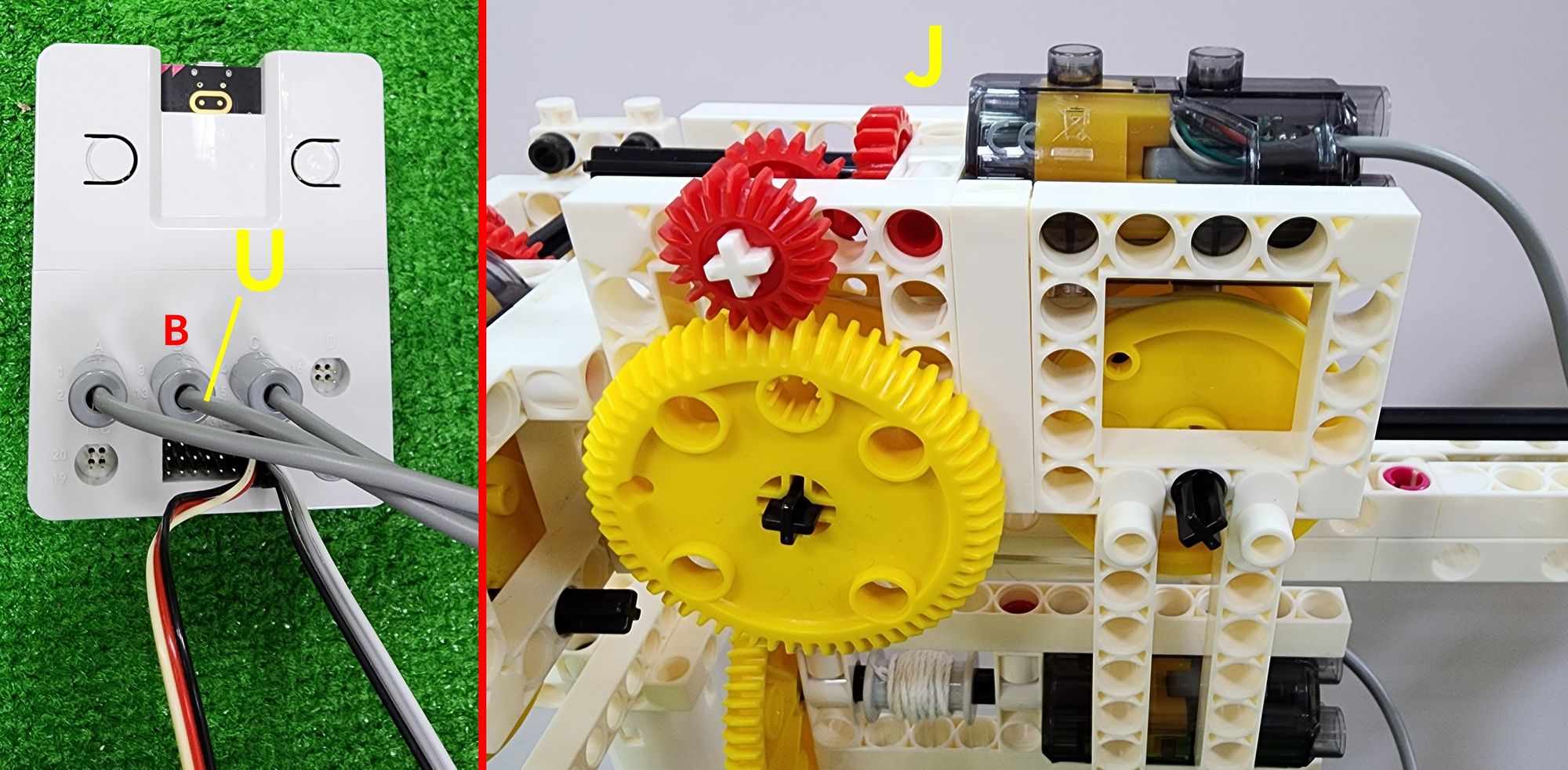
第六二步我們要進行左右天車(部件J)的配線,首先將部件U的公頭與micro:bit 智能主控盒的腳位B對接,接著再將部件U的母頭與部件J中50倍行星齒輪馬達盒的公頭對接(圖一六零)。
第六三步我們要進行捲線裝置(部件L)的配線,首先將部件V的公頭與micro:bit 智能主控盒的腳位C對接,接著再將部件V的母頭與部件L中50倍行星齒輪馬達盒的公頭對接(圖一六一)。
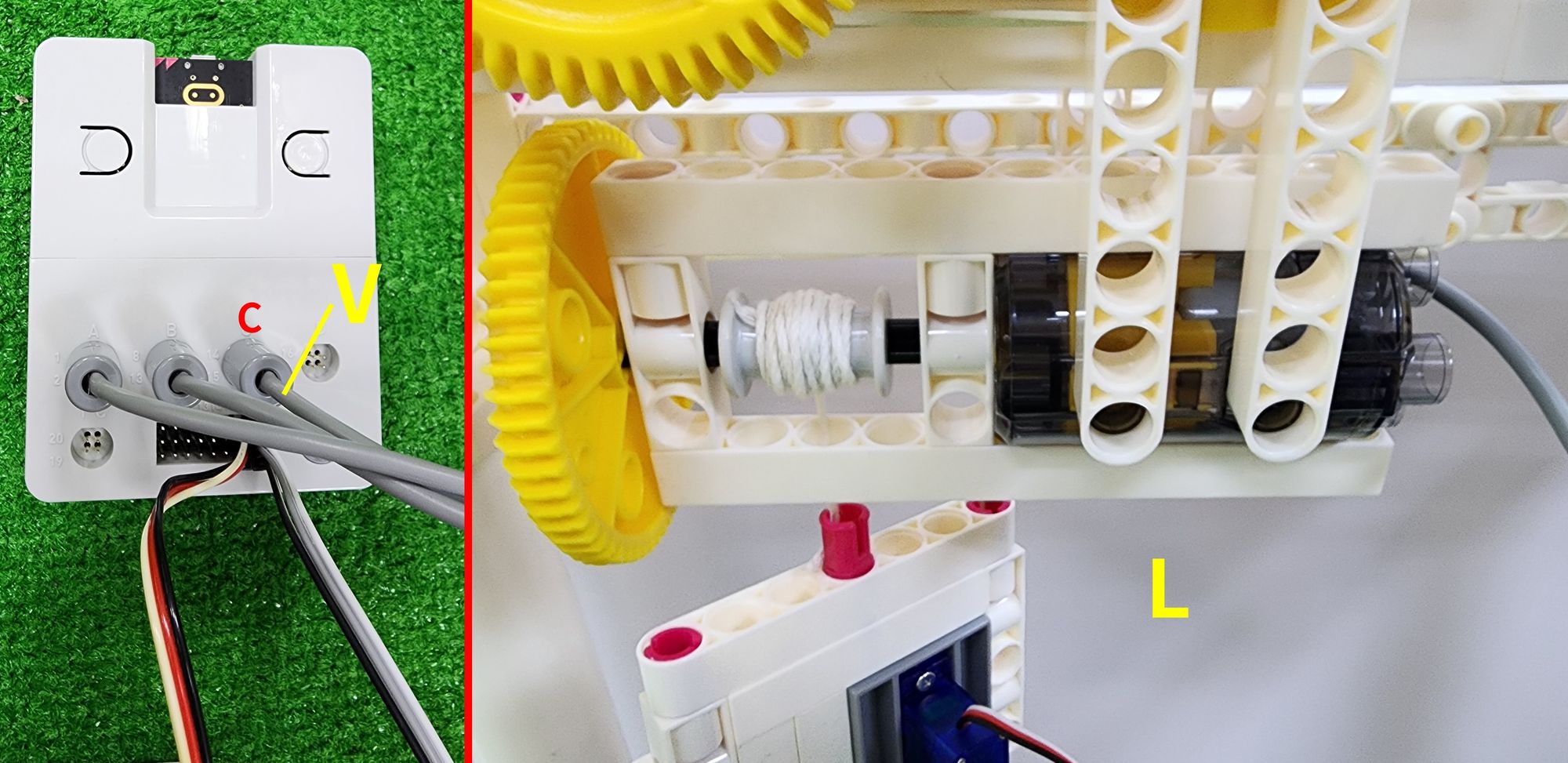
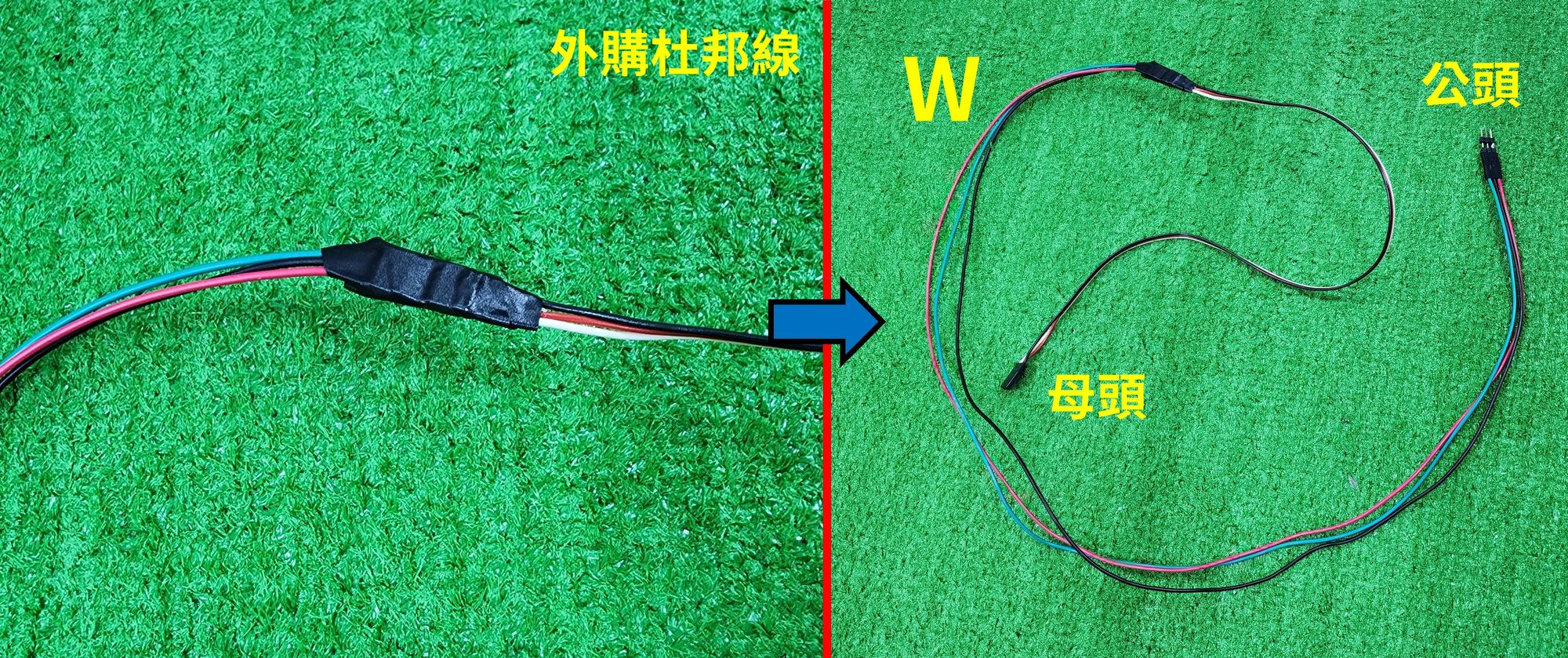
在進行夾爪(部件K)的配線前,浣熊老師這邊要先提醒大家:因為夾爪的180度角度金屬伺服馬達使用的是杜邦線,所以需要再額外購買足夠長度的杜邦線,或是將現有的杜邦線連接起來才能進行配線。我們將這條連接起來的杜邦線定義為部件W(圖一六二)。
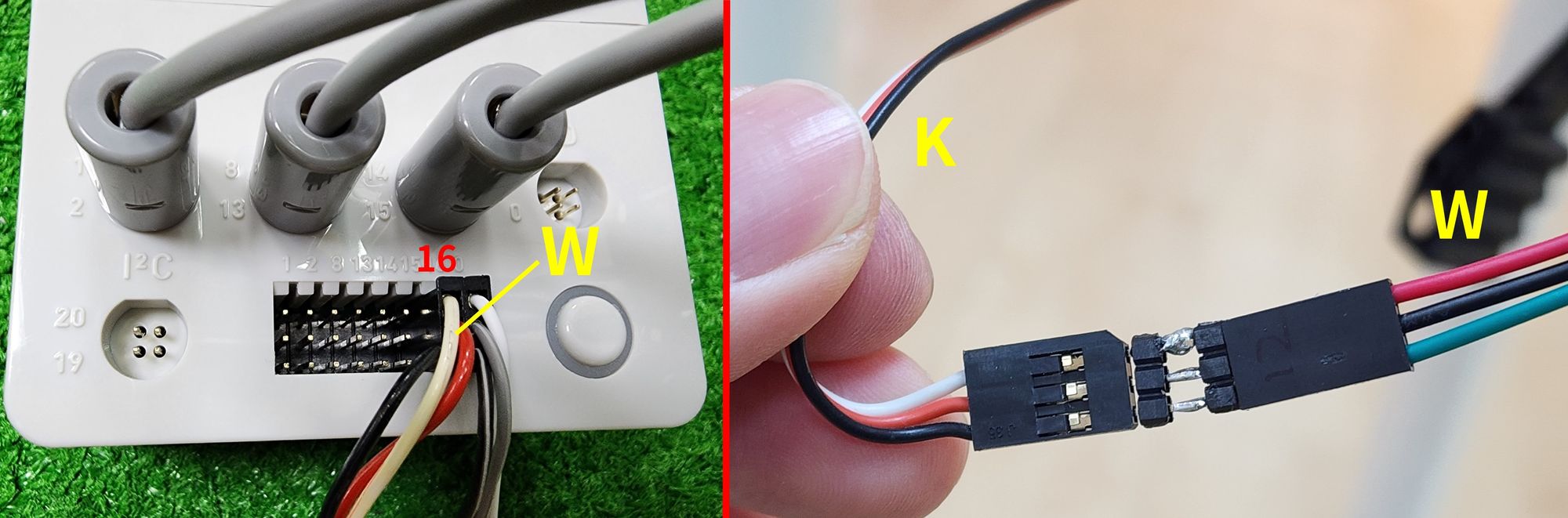
第六四步要進行夾爪(部件K)的配線,首先將部件W的母頭與micro:bit 智能主控盒的腳位16對接,接著再將部件W的公頭與部件K中180度角度金屬伺服馬達的母頭對接(圖一六三)。
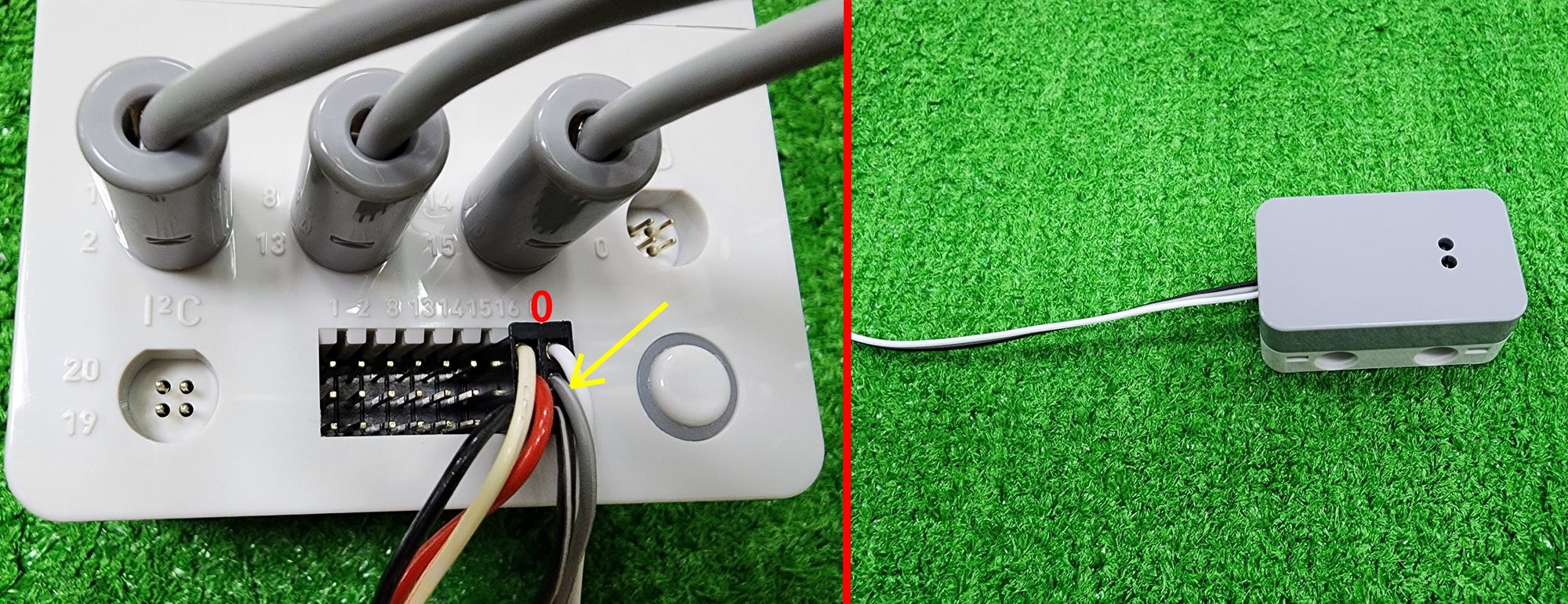
第六五步要進行可調式IR感應器(1409-W85-D)的配線,只要直接將可調式IR感應器的接頭安裝在micro:bit 智能主控盒的腳位0上就大功告成囉(圖一六四)。
這樣所有的配線就完工了(圖一六五),你可以使用束帶將電線捆起來集中,或是將電線穿過410mm管,讓它們看起來既整齊又乾淨哦!

若是身邊沒有束帶的話,你也可以使用智高新開發的線材整理鍵(1409-W10-F1S)(圖一六六),此零件能夠將線材集中,並固定在智高積木上唷。

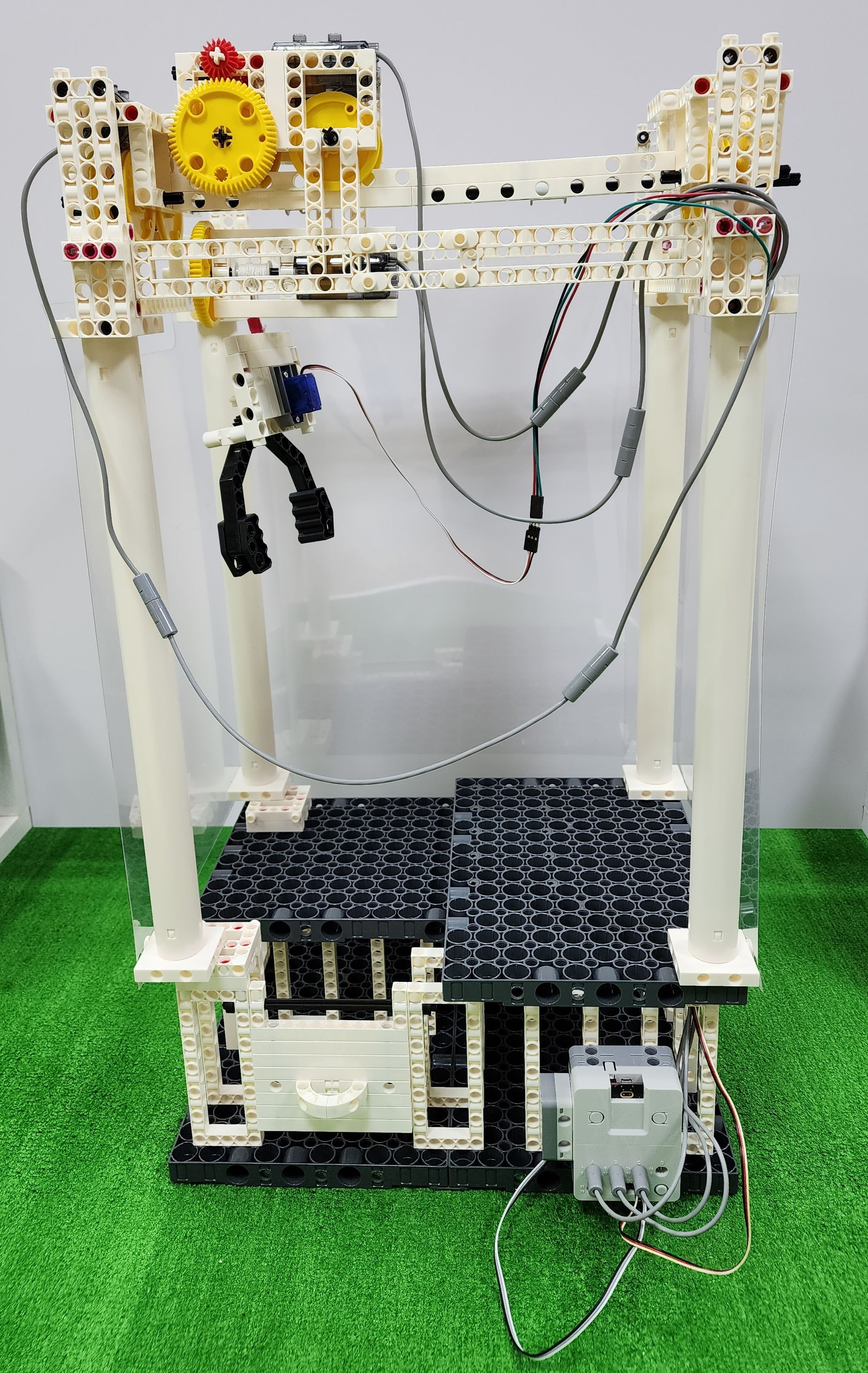
最後我們要用短結合鍵先將可調式IR感應器固定在micro:bit 智能主控盒的側邊,接著再將micro:bit 智能主控盒固定在夾娃娃機上(圖一六七),這樣就完成了一個厲害的夾娃娃機啦٩(๑>∀<๑)۶,你也可以使用紙卡固定鍵將透明塑膠片固定在夾娃娃機的支架上,模擬出玻璃隔板的效果哦(圖一六八)。

◆ 程式編寫
雖然我們完成了夾娃娃機的製作,但若是沒有燒錄程式的話,夾娃娃機是無法順利運作的,現在就跟著浣熊老師的腳步,一起來完成夾娃娃機的程式吧~
第一步要先請大家開起電腦,進入Micro:bit編程頁面,透過這個頁面,我們能夠進行程式的編寫,並使用Micro USB 傳輸線將程式燒錄到micro:bit 的板子,有關於Micro:bit板子的介紹,可以參考樹懶老師的[教育時光機 EP5]唷!
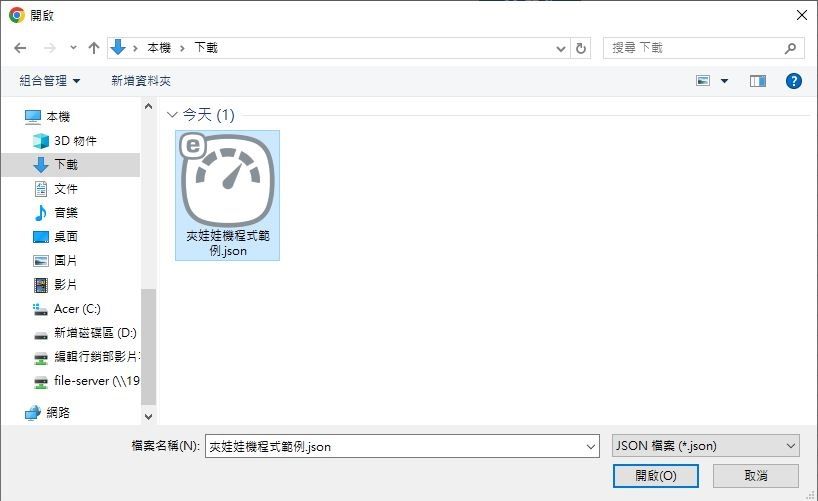
第二步要請大家進入下列的雲端資料夾,並下載名為"夾娃娃機程式範例"的檔案(圖一六九),將夾娃娃機的程式下載至電腦。



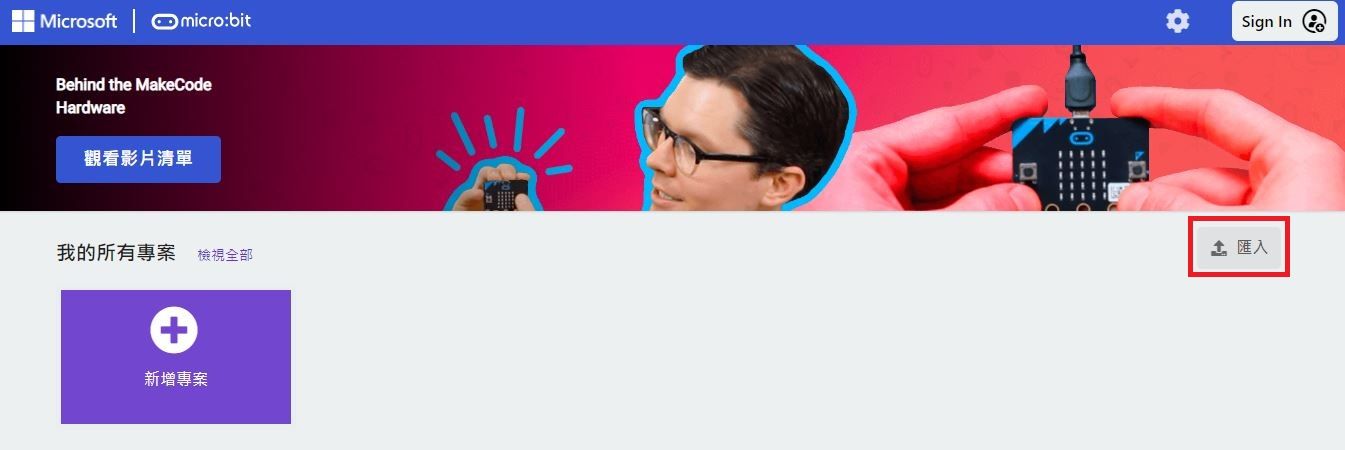
第三步我們要透過Micro:bit編程頁面來開啟夾娃娃機的程式,首先點擊右側的"匯入"(圖一七零),接著選取最左側的"匯入檔案"(圖一七一),並在資料夾中點擊夾娃娃機的程式範例(圖一七二)。

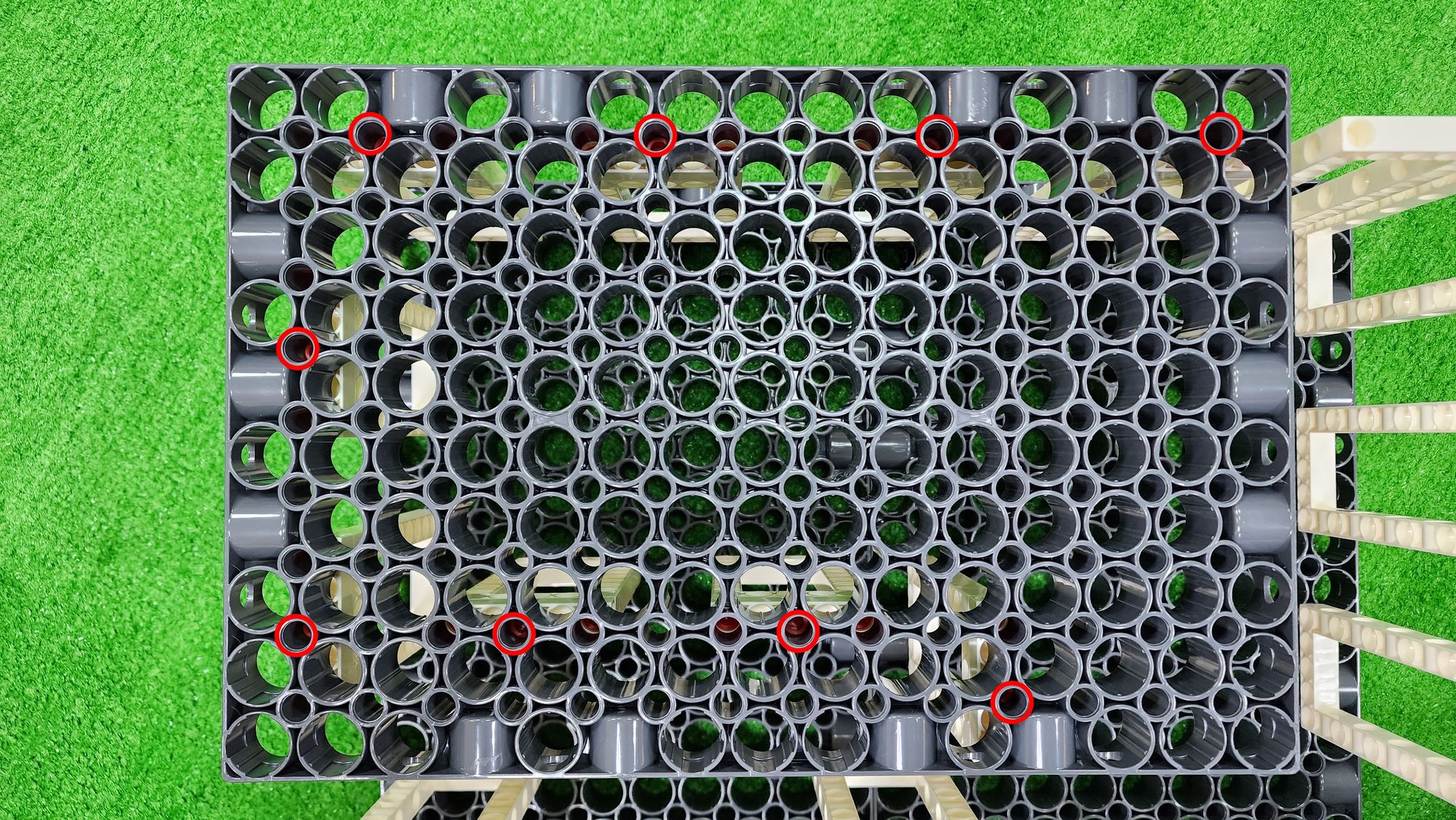
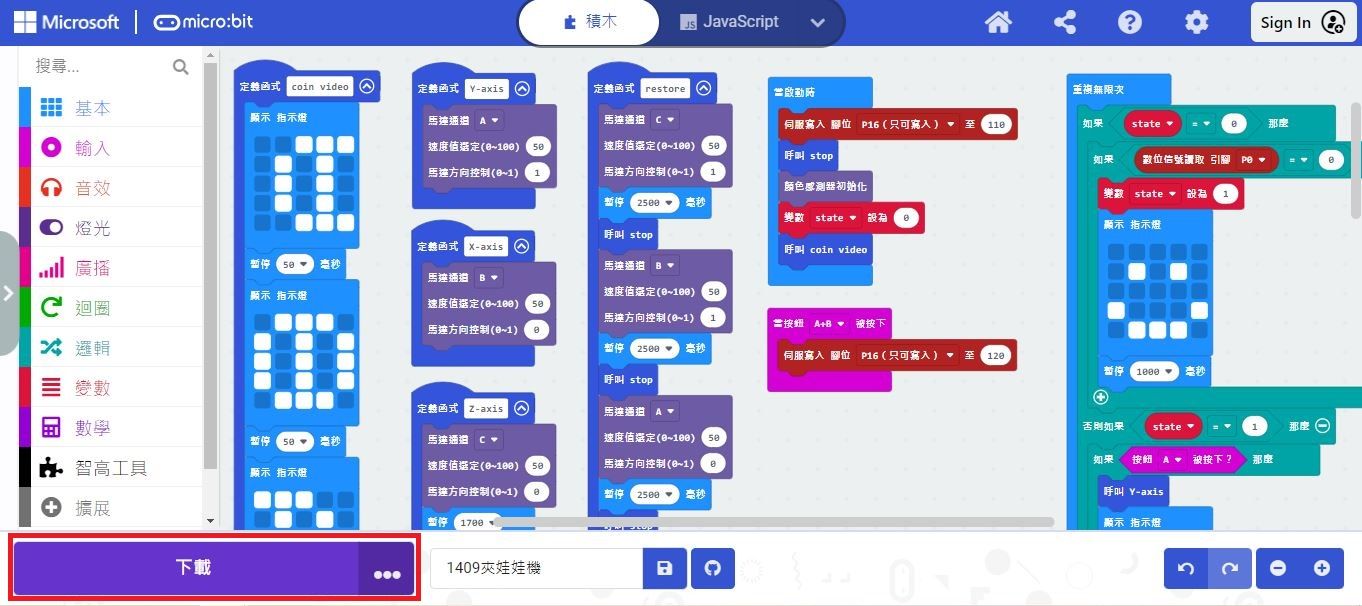
現在我們已經成功將夾娃娃機的程式開啟了(圖一七三),因為這個程式非常複雜,所以浣熊老師不會進行每個程式的解說,只會針對函式,也就是紅框的部分進行簡單的介紹。
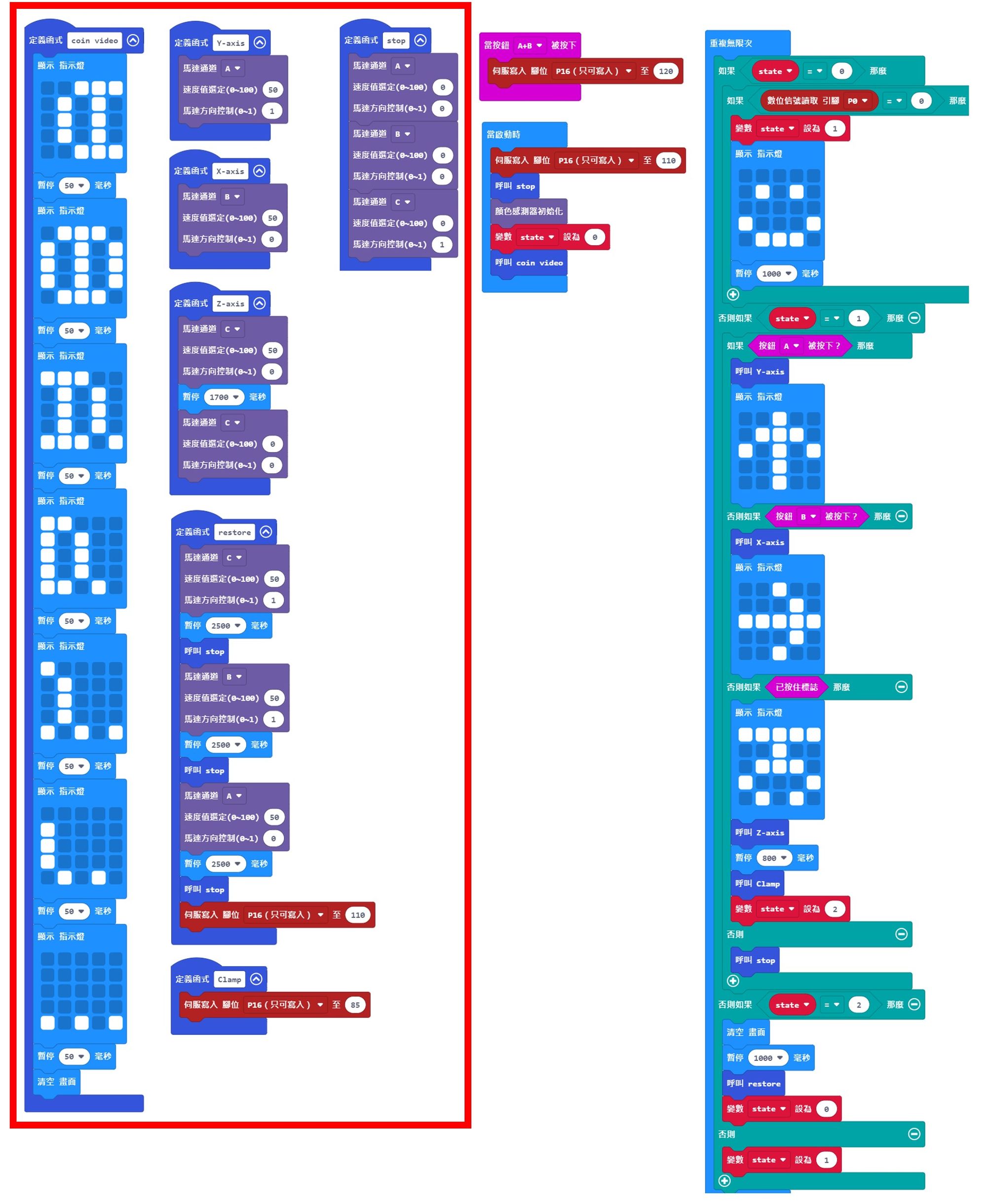
夾娃娃機的函式一共可以分為七種(圖一七四),分別為:
- Y-axis: 控制夾娃娃機的前後天車,即爪子的前後位置。
- X-axis: 控制夾娃娃機的左右天車,即爪子的左右位置。
- Z-axis: 控制夾娃娃機的捲線裝置,即爪子的上下位置。
- Clamp: 控制夾娃娃機的夾爪。
- Stop: 停止前後天車、左右天車以及捲線裝置。
- restore: 將爪子移動回原本的位置。
- coin video: 控制夾娃娃機的開機動畫。
你可以增加Y-axis以及X-axis函式中的馬達轉速,讓前後天車以及左右天車的移動速度加快,夾爪便能夠以更快的速度進行移動,或是調整Clamp函式中180度角度金屬伺服馬達的角度,讓夾爪可以將物品抓取得更牢固。

當我們完成程式後,可以點擊左下角的"下載"(圖一七五),將夾娃娃機的程式下載到電腦中,接著再透過拖移檔案的方式,將程式燒錄到micro:bit 板子,完成之後我們就可以準備來操作夾娃娃機啦!
◆ 模型操作
首先我們要開啟micro:bit 智能主控盒的電源,才能進行夾娃娃機的操作。透過影片一我們能夠發現,當可調式IR感應器感測到物體時,會顯示笑臉的圖案(0:07~0:12),此時我們能透過A鍵操作前後天車,控制夾爪的前後方向,再透過B鍵操作左右天車,控制夾爪的左右方向(0:12~0:17),當位置調整完成後,我們可以將手放在Micro:bit板子的標誌上,啟動捲線裝置將夾爪放下,並在夾爪夾取物品後將夾爪升起(0:18~0:26),接著左右天車以及前後天車會將夾爪運回原本的位置,最後將夾爪打開以放下物品(0:26~0:32)。
◆結語
我們這次所製作的夾娃娃機模型比以往的模型還要複雜,浣熊老師建議在製作時可以請大人進行協助,尤其是各個天車以及軌道的組裝,如果一個不小心組錯的話,可能會導致夾娃娃機無法順利運作唷。
另外你也可以試著和朋友一起比賽,看誰能夠用夾娃娃機夾出最多東西,一起來成為夾娃娃機大師吧!
◆科學原理
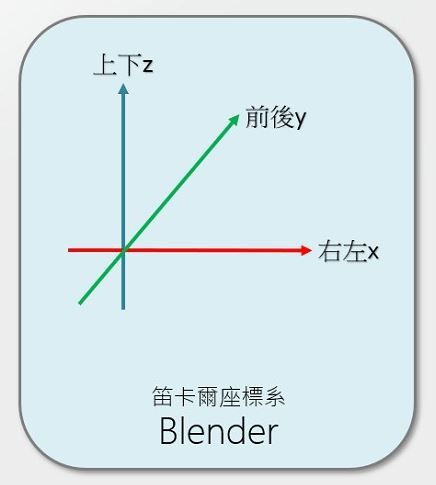
在夾娃娃機模型中,我們透過左右天車、前後天車以及捲線裝置來控制夾爪的位置(影片二),而這應用到座標系統中的笛卡兒坐標系(圖一七六),笛卡兒坐標系將空間分為三個維度(3 Dimensions),分別是左右方向的X軸、前後方向的Y軸以及上下方向的Z軸,不管物品在哪個位置,我們都可以透過這三個維度將它標示出來。
座標系統是幾何學和數學之間的橋樑,能夠廣泛應用在地理學、天文學以及物理學當中,如地圖的經緯度、天體與地球相對位置的標示、物體在空間中運動的參考坐標系統...等。
◆課綱參考
生 k-V-1 能了解工程與設計的基本知識,如:工程設計流程、動力機構、 結構設計、工程材料、機電控制等。
生 s-IV-2 能運用基本工具進行精確的材料處理與組裝。
生 A-IV-2 機構與結構的應用。
Eb-Ⅳ-8 簡單機械,例如:槓桿、滑輪、輪軸、齒輪、斜面 等,通常具有省時、省力,或者是改變作用力方向等功能。
◆參考資料
 飛騰
飛騰 維基媒體專案貢獻者
維基媒體專案貢獻者
Please sign in to vote.