[教育時光機 EP10] AI,最強的生活小幫手!Webduino x 機器人警衛

![[教育時光機 EP10] AI,最強的生活小幫手!Webduino x 機器人警衛](/content/images/size/w2000/2023/07/334420_0.jpg)
在教育時光機EP9中,我們介紹了AI的定義以及與智高積木的連結,簡單來說,AI人工智慧就是讓電腦盡量像人類一樣思考、執行策略的科技。
但你可曾否想過,既然人類會思考,為什麼又需要人工智慧?
事實上,人類進一步解讀、分析資料的能力,已不及現有的龐大資料量。這時,就能請人工智慧代勞。人工智慧經過感知、學習、推理與校正等階段,深入大量數據、執行複雜且繁瑣的工作,協助人類突破限制,跨出過去的研究與應用疆界。

因此今天就讓我們來製作一台機器人警衛,它會在偵測到陌生人時發出訊息通知主人,實際體驗AI科技如何應用於生活中吧!
◆課前準備(15分鐘)
1. 請學習者更新主控盒韌體、連線Wi-Fi,並且於以下連結下載安裝「人臉辨識模組」檔案。
※務必確保已下載並匯入「人臉辨識模組」檔案,否則模型無法做動,連結有詳細操作流程!
程式設計網頁連結:https://webai.webduino.io/#/
主控盒韌體更新教學影片:https://youtu.be/jg0YLk8R4uY
Wi-Fi連線教學影片:https://youtu.be/32Z_JbBpHxo

2. 準備模型所需零件

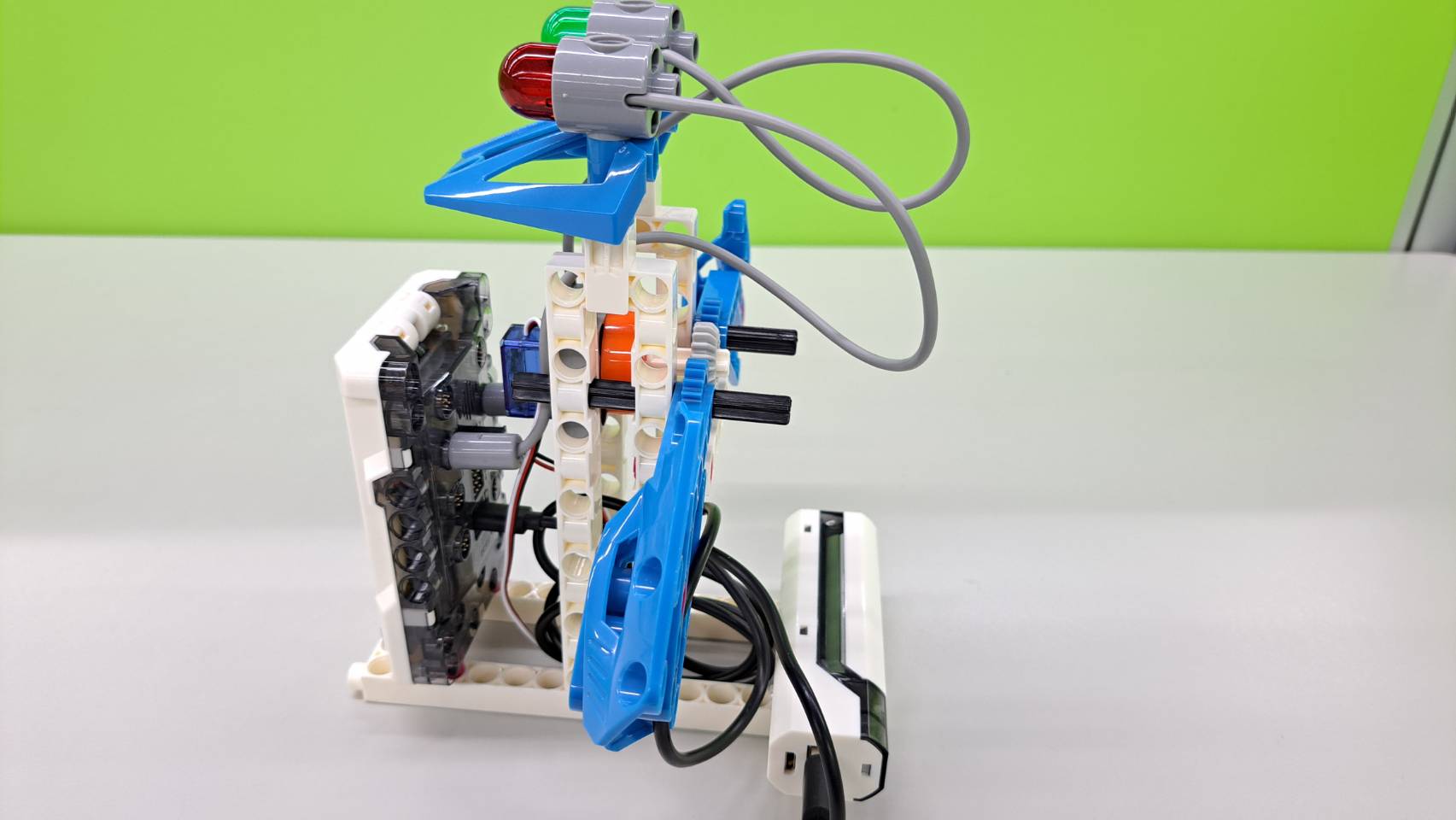
◆示範模型製作(35分鐘)
可參考以下組裝步驟將模型一步步組裝。
步驟1:將180度伺服馬達裝在3x13孔超長方孔中間,如圖所示。
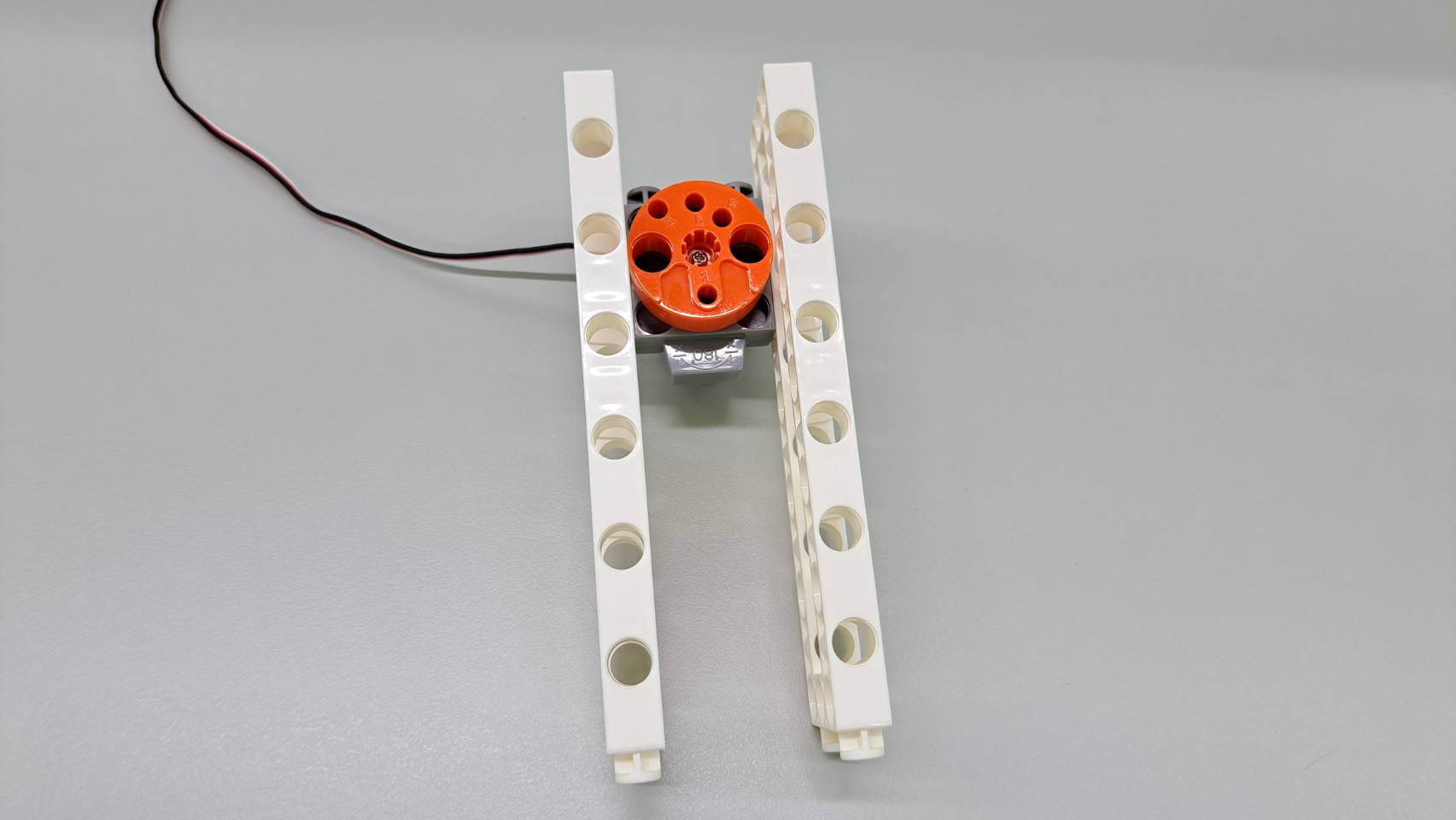
步驟2:在180度伺服馬達裝上馬達短軸與20T齒輪;在3x13孔超長方孔兩側裝上5孔長條,如圖所示。

步驟3:在20T齒輪左右兩側的孔洞放入軸與145度齒輪曲軸。

步驟4:將模型立起,並於上方放入單向轉接鍵與飾片。
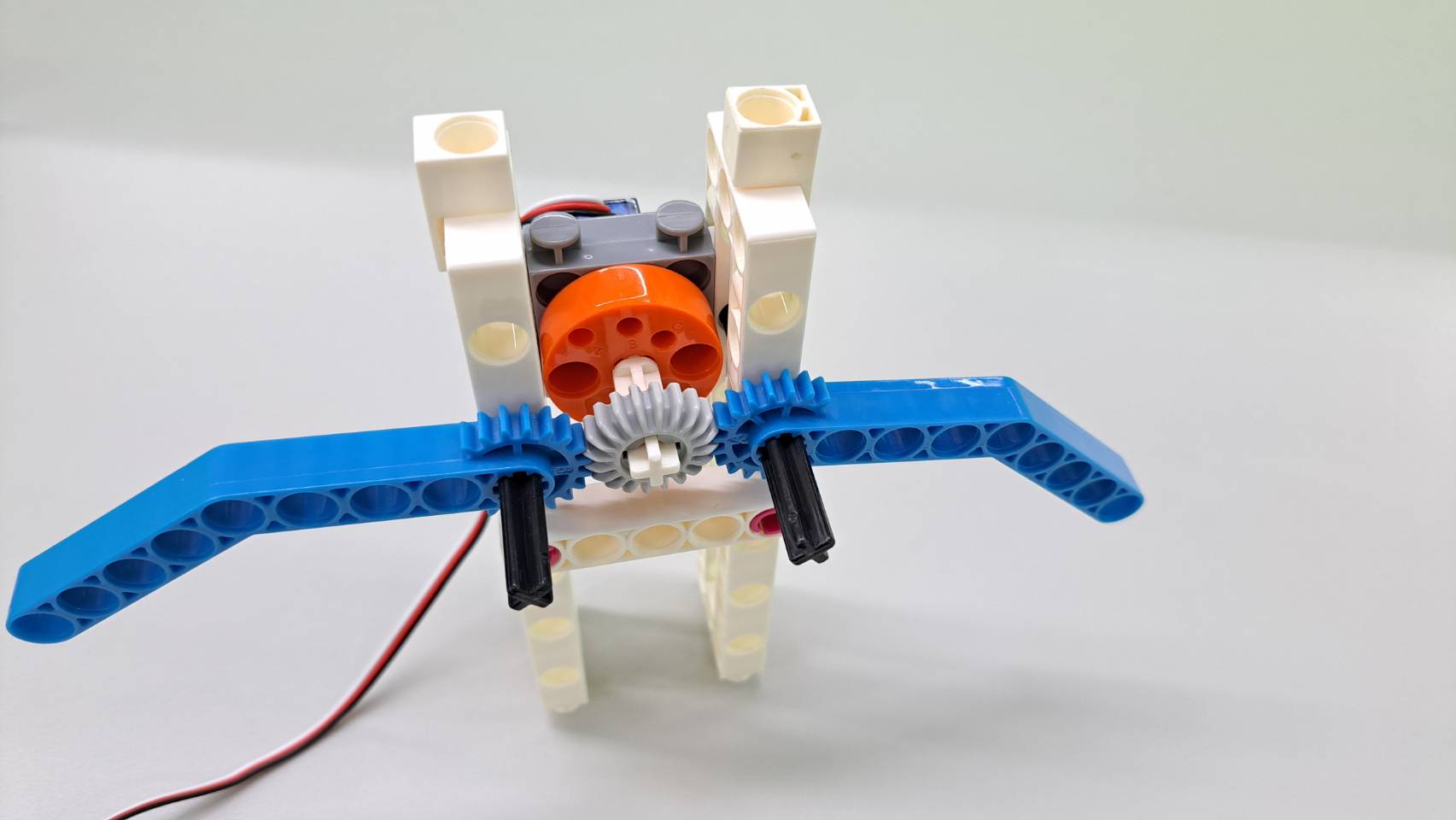

步驟5:加入飾片與燈泡完成左右手與眼睛(此部分可自行創作修改)

步驟6:將機器人、主控盒、電池盒放置於5X15長方框上,位置不拘。
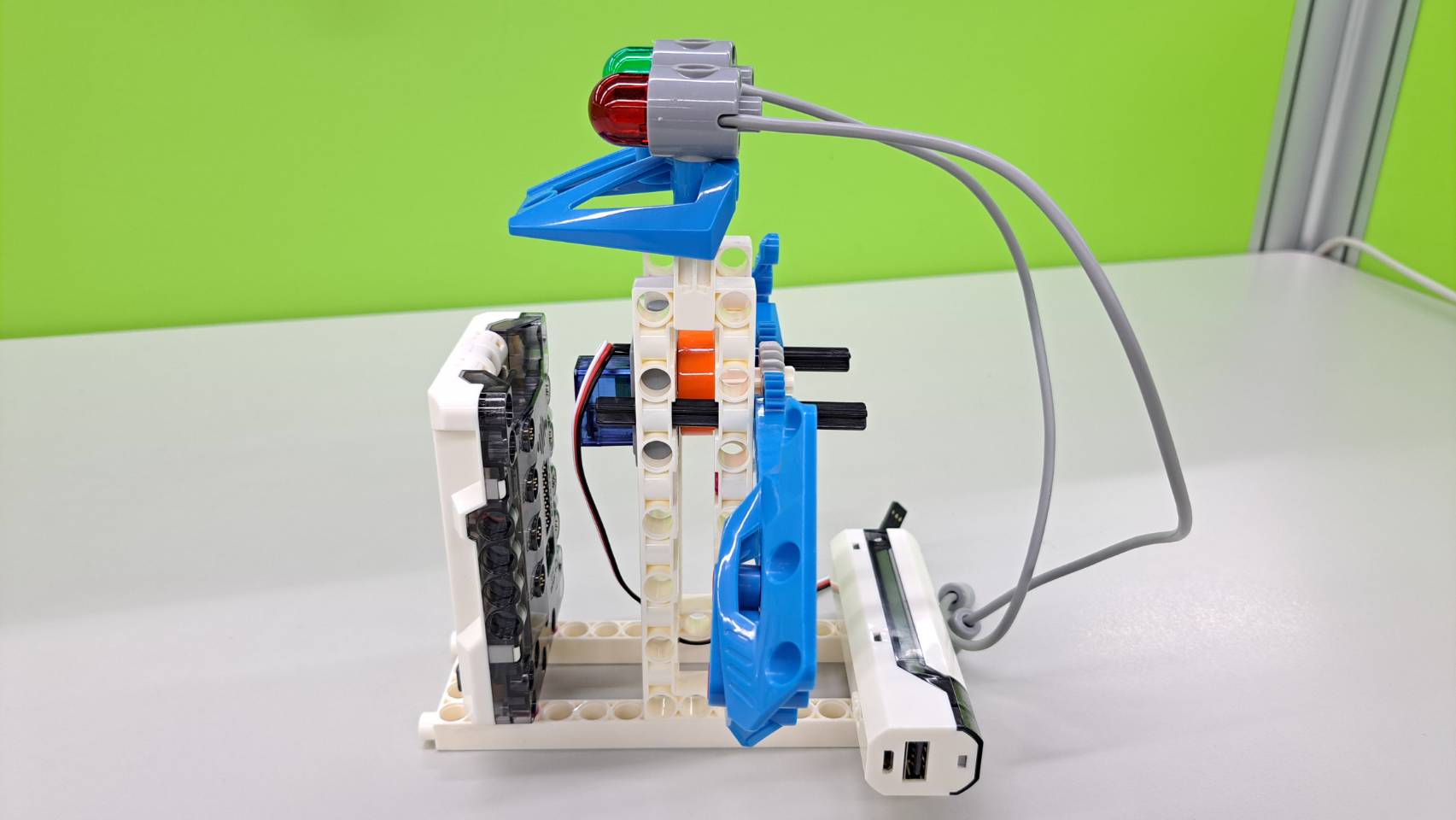
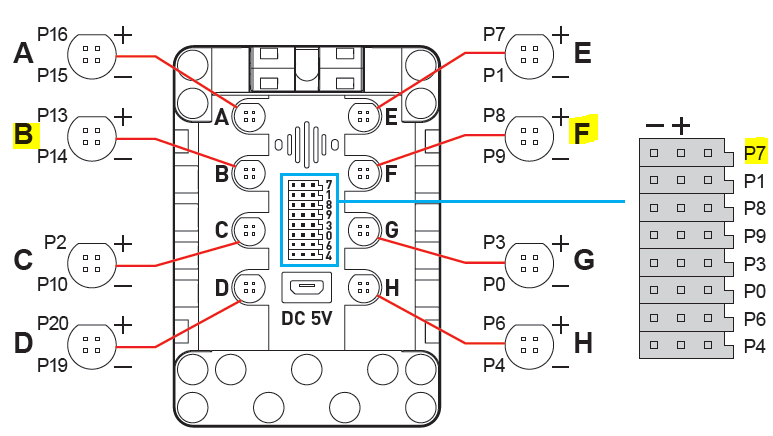
步驟7:將180度伺服馬達、燈泡與電池盒連接在主控盒上,孔位如下圖所示。
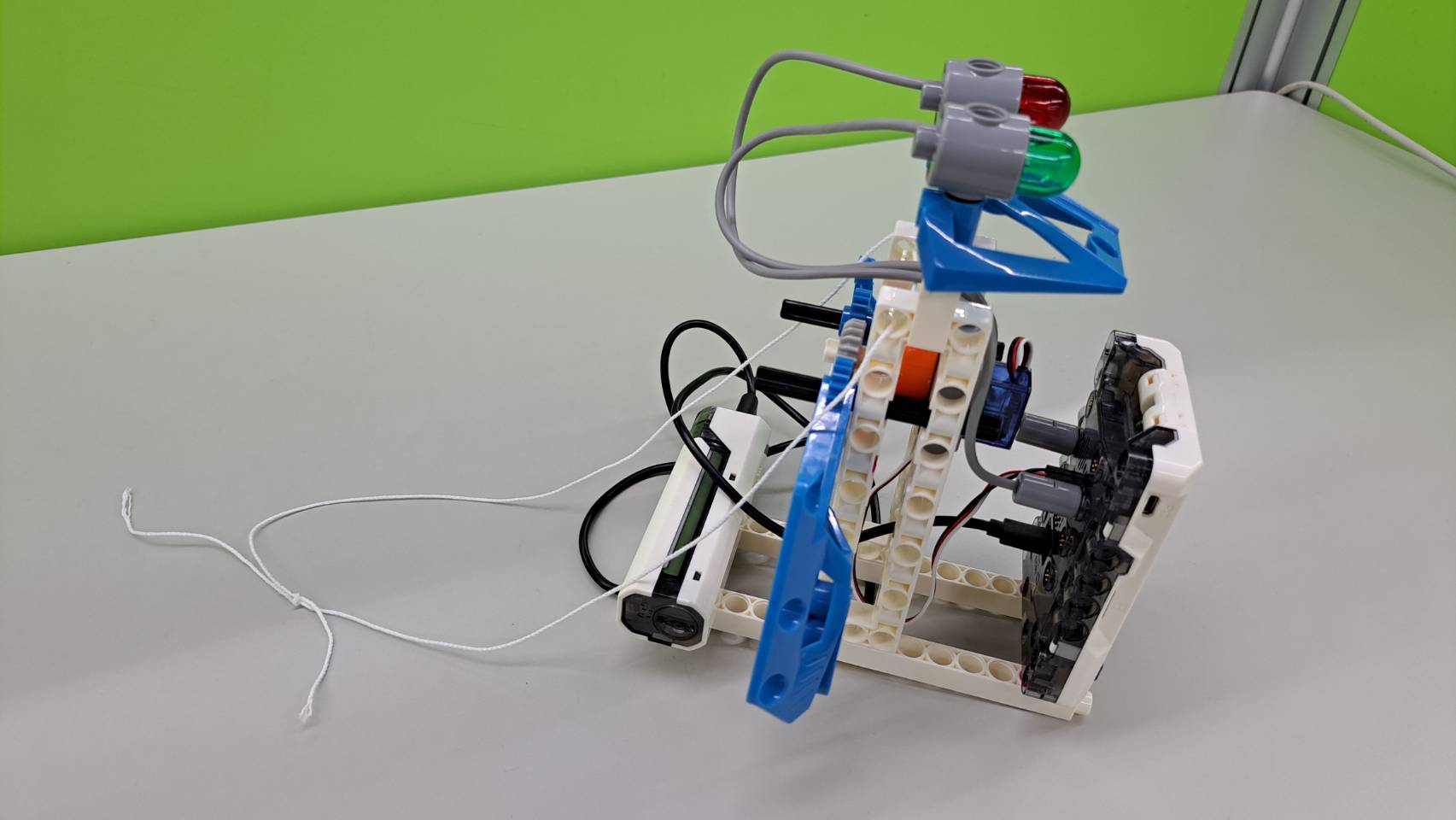
步驟8:將模型綁上棉繩,即可掛置各種物體上!

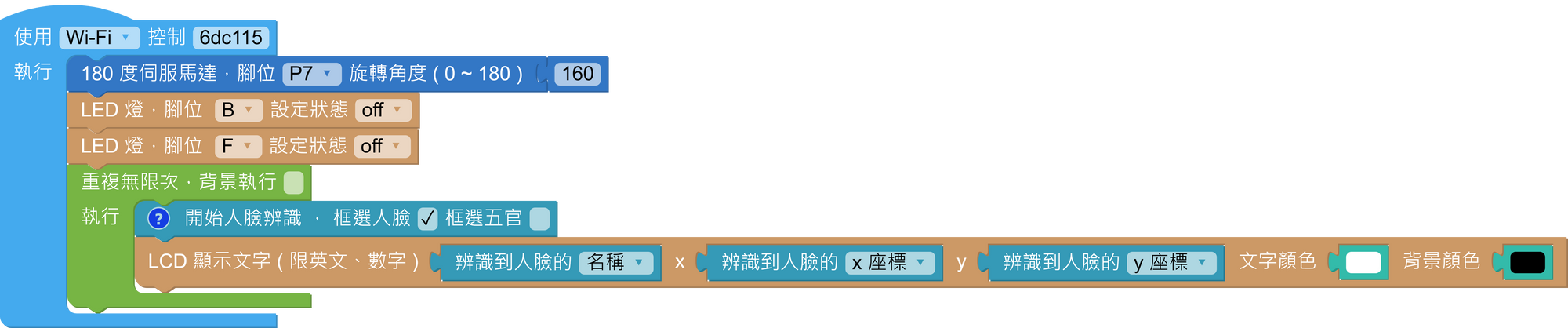
◆程式邏輯
1. 開始執行程式時,180度伺服馬達回歸至初始角度,綠燈(B)與紅燈(F)皆關閉,並且開始執行人臉辨識功能。
※務必確認主控盒已連接Wi-Fi。
2. 由於我們未訓練主控盒,因此辨識到的人臉名稱都會是"?",意即陌生人。
3. 當陌生人入侵時,綠燈(B)與紅燈(F)皆點亮,180度伺服馬達轉動使機器人手部晃動引發警報。
4. 發出警報時拍攝照片,並透過Line notify傳送警報訊息給主人。
Line notify設定方式請參考http://buberhu.blogspot.com/2018/10/webduinolineline-notify.html
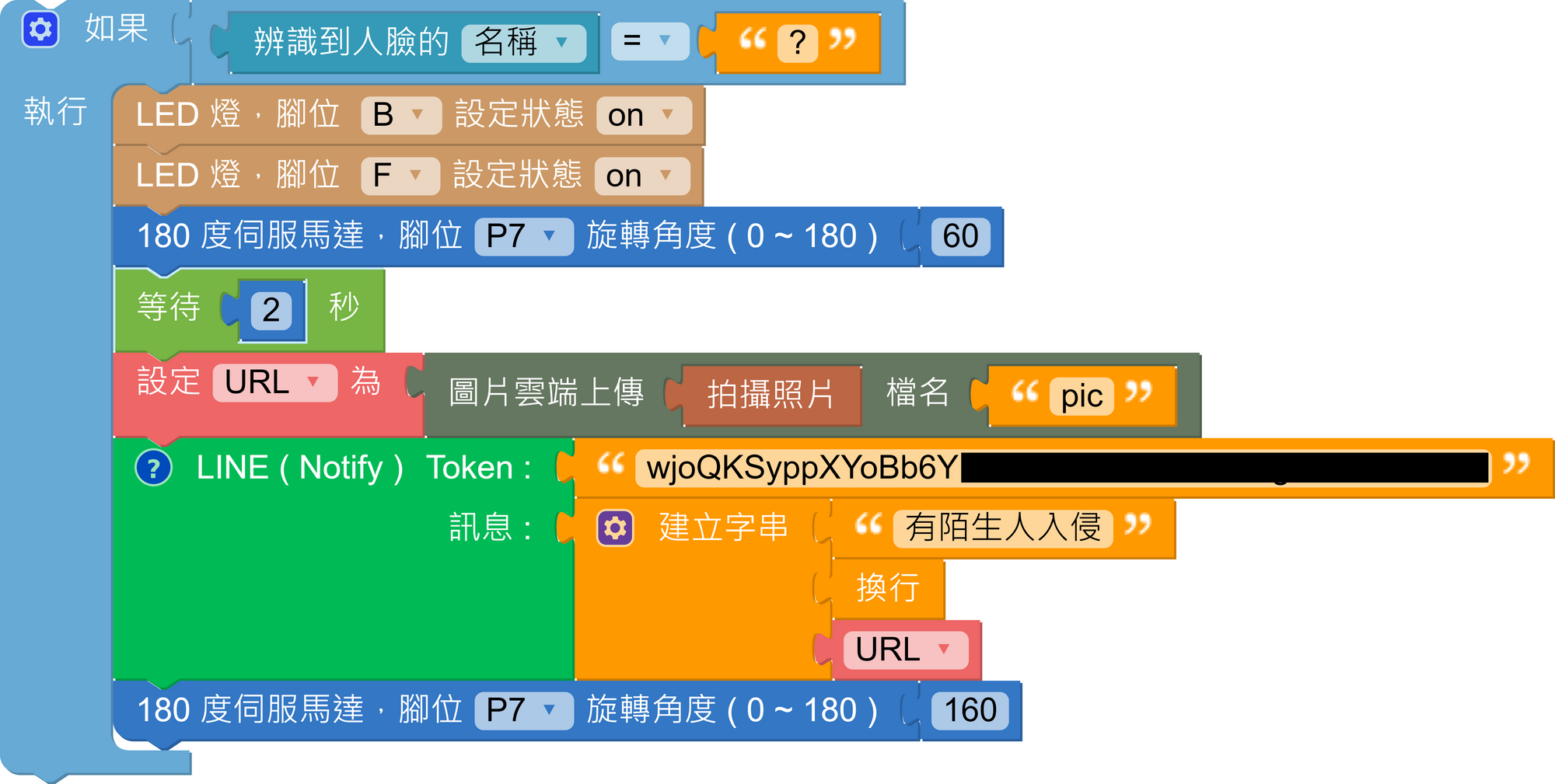
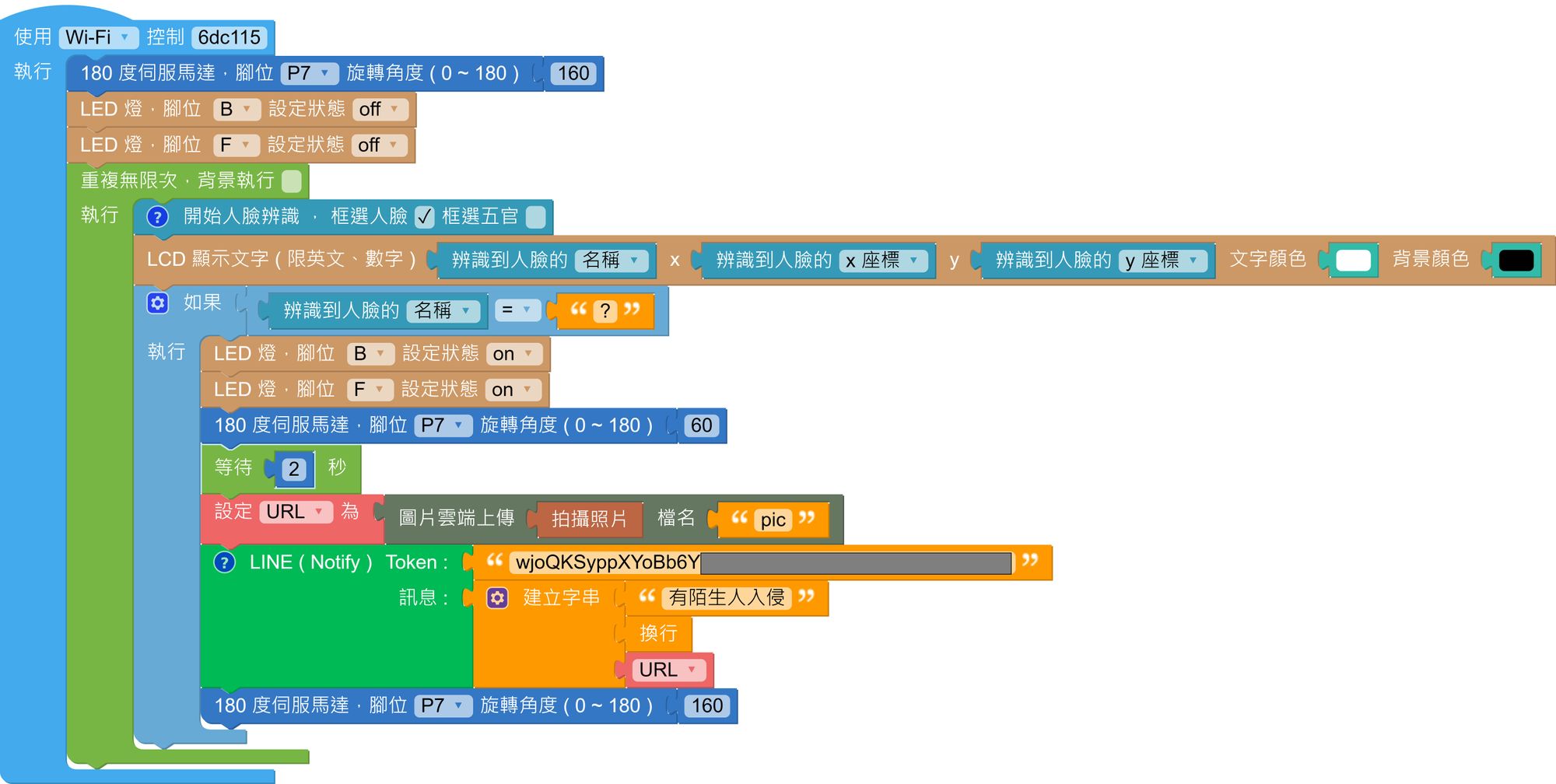
5. 完整程式圖如下
◆學生製作模型與遊玩(30分鐘)
1、 協助學生完成模型與程式編寫,教師適時提供協助即可。
2、 完成的學生可開始改造程式或模型以增加變化性,例如:增加不同的警報動作。
◆總結與收拾(10分鐘)
1、 教師可於課程最後進行總結,介紹AI目前於生活中的應用。
例如:語音助理、掃地機器人、無人商店、Chat GPT、自動駕駛、智慧家電
2、 請學生拆解模型、分類並正確歸位,須提醒學生使用扳手拆除零件而非硬拆。
◆科學原理
此模型使用的科學原理為「人臉辨識」。
人臉辨識(Face Recognition),即運用人臉影像進行分析比對後驗證身分,屬於生物辨識技術之一。 由於人臉辨識因為特徵明顯,辨識準確率高、速度快,因而受到各行各業青睞,應用相當廣泛。
當系統偵測到臉部、擷取人臉影像後,就會轉換成電腦數值,系統再以此數值建立資料庫,並於後續進行身分分析、比對與驗證。系統經過深度學習後,人臉辨識的精準程度也就會逐漸提升。
◆後記
人臉辨識的優點為不需要近距離也能準確辨識,同時能辨識多人,大幅減少過去人為判別會造成的誤差。
然而,人臉辨識缺點為容易受到資料庫環境因素影響,例如:燈光、角度、口罩或眼鏡的物品遮擋等等。
AI在生活中的應用相當廣泛,讓我們一起期待教育時光機接下來的冒險吧!
關鍵字參考:
程式教育、AI、人工智慧、機械學習、深度學習、人臉辨識、機器人警衛、Line Notify
課綱參考:
科-J-A3 利用科技資源,擬定與執行科技專題活動。
運 t-IV-1 能了解資訊系統的基本組成架構與運算原理。
運 r-V-3 能利用程式語言表達運算程序。
資 P-IV-1 程式語言基本概念、功能及應用。
設 k-IV-1 能了解日常科技的意涵與設計製作的基本概念。
Please sign in to vote.