垃圾桶


智高 #1269編程積木應用套件micro:bit專用
延伸應用簡單模型12
垃圾桶
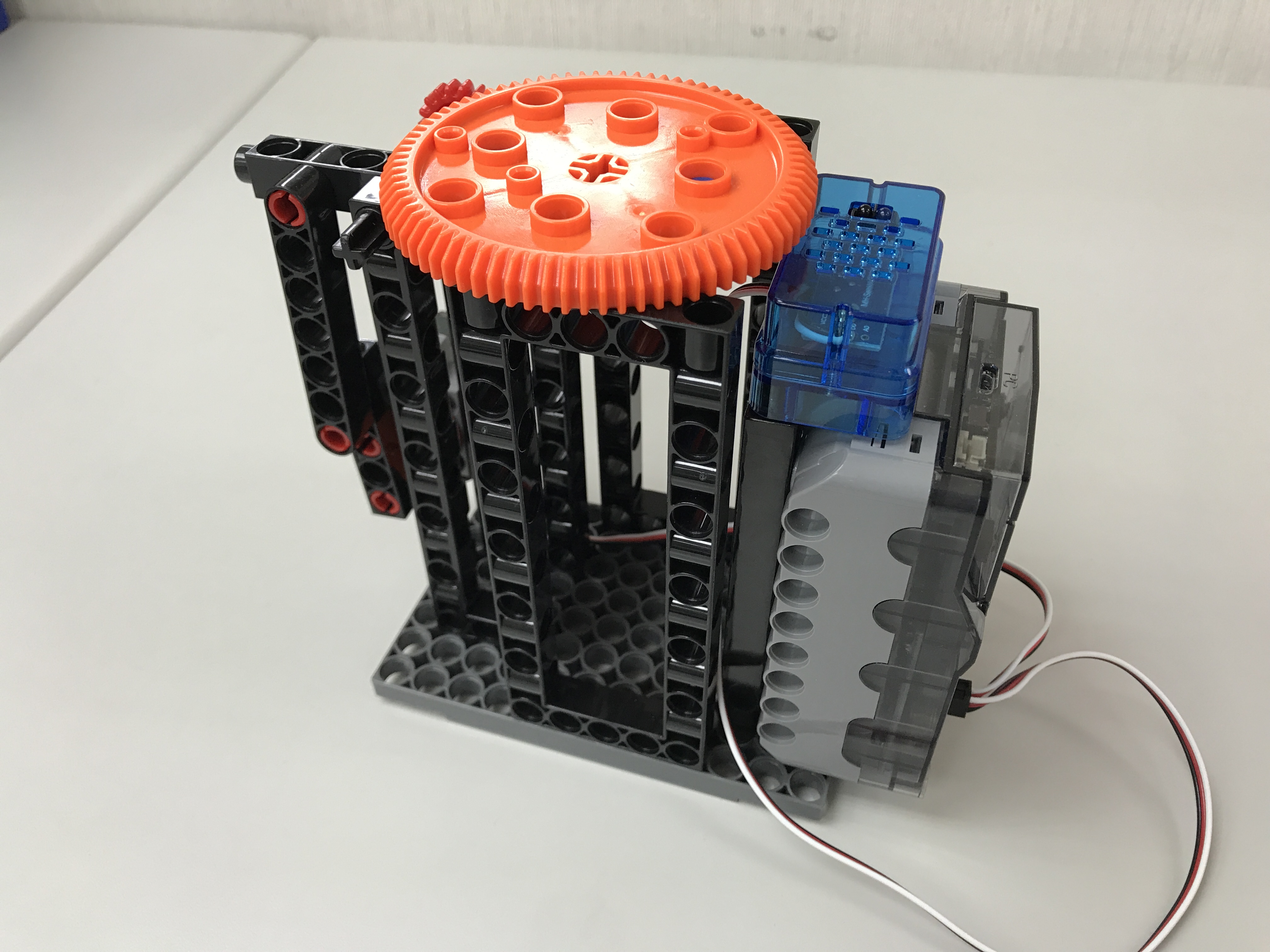
利用角度伺服拉動連桿來打開垃圾桶蓋。

本課程是利用IR循跡感應器結合180度角度伺服馬達的應用模型。
垃圾桶打開的樣子。
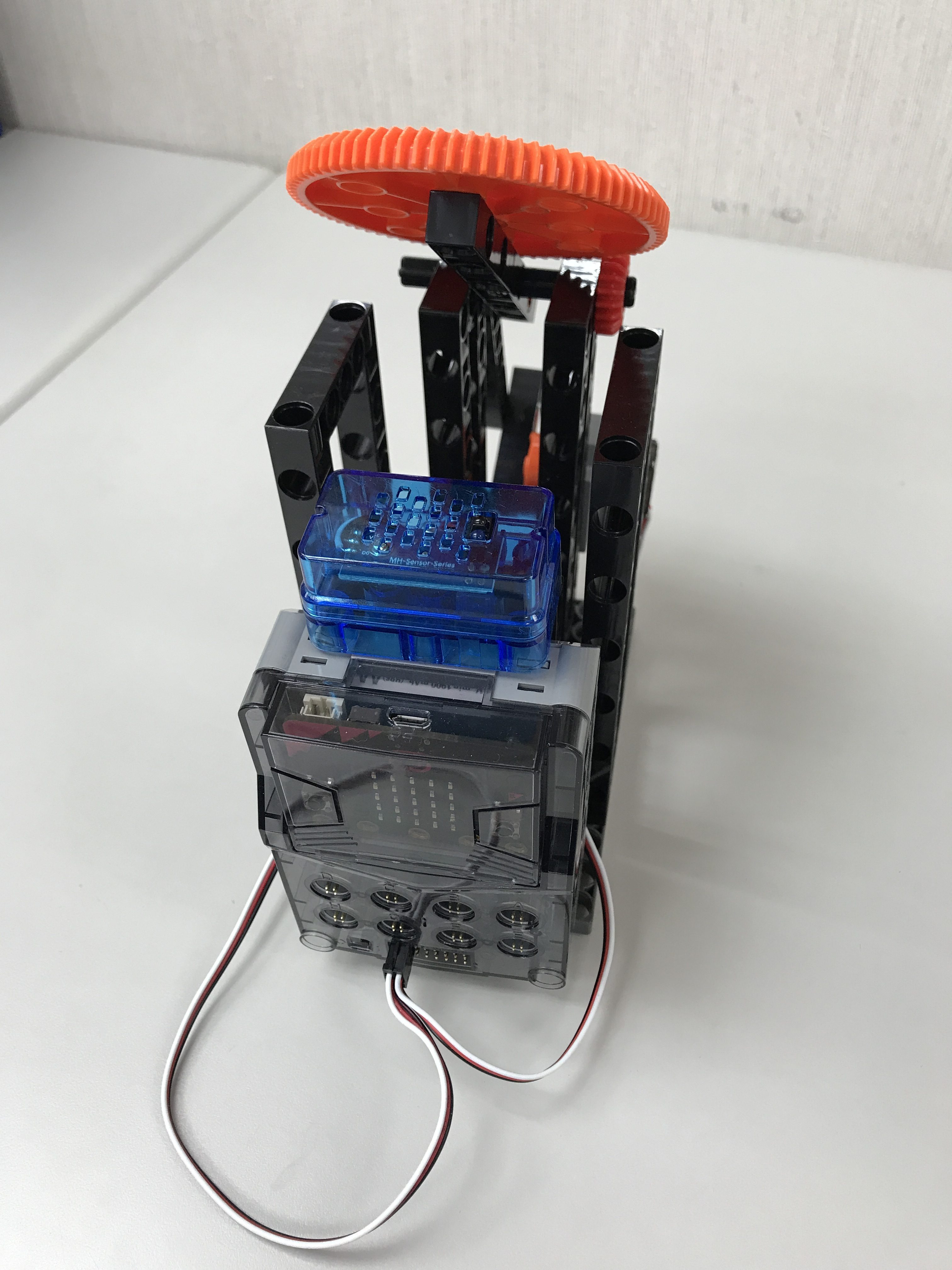
本課程使用IR循跡感應器(P1)及180度角度伺服馬達(P8),兩者都是以杜邦接頭連接主控盒。
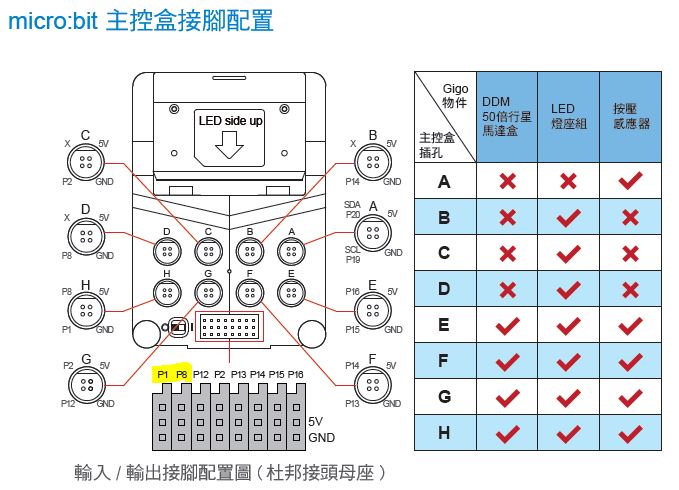
180度角度伺服馬達是以寫入角度的方式使用

IR循跡感應器以讀取訊號的方式使用
![]()
程式碼
啟動時角度伺服馬達轉至90度。

如果IR循跡感應器感應到東西(想丟垃圾的意圖)
角度伺服馬達轉至145度(連桿拉動垃圾桶蓋打開)
等待兩秒
否則
角度伺服馬達轉回90度(垃圾桶蓋回去)
實際來看看效果吧!
智高 #1269編程積木應用套件micro:bit專用
延伸應用簡單模型12
垃圾桶

利用角度伺服拉動連桿來打開垃圾桶蓋。

本課程是利用IR循跡感應器結合180度角度伺服馬達的應用模型。
垃圾桶打開的樣子。

本課程使用IR循跡感應器(P1)及180度角度伺服馬達(P8),兩者都是以杜邦接頭連接主控盒。
180度角度伺服馬達是以寫入角度的方式使用

IR循跡感應器以讀取訊號的方式使用
![]()
程式碼
啟動時角度伺服馬達轉至90度。

如果IR循跡感應器感應到東西(想丟垃圾的意圖)
角度伺服馬達轉至145度(連桿拉動垃圾桶蓋打開)
等待兩秒
否則
角度伺服馬達轉回90度(垃圾桶蓋回去)
實際來看看效果吧!
https://www.youtube.com/watch?v=FQax2wDRBlc&feature=youtu.be
Please sign in to vote.