升級版機械手臂-轉動開合


「升級版轉動開合機械手臂」是由彈力懶人夾改造的,因為希望能讓手臂自動化,但馬達對於彈力控制不容易,較容易做旋轉運動,因此進行了改造,讓手臂的控制以旋轉控制開合。
※先來欣賞一下南投縣僑興國小學生上課的成果照片。
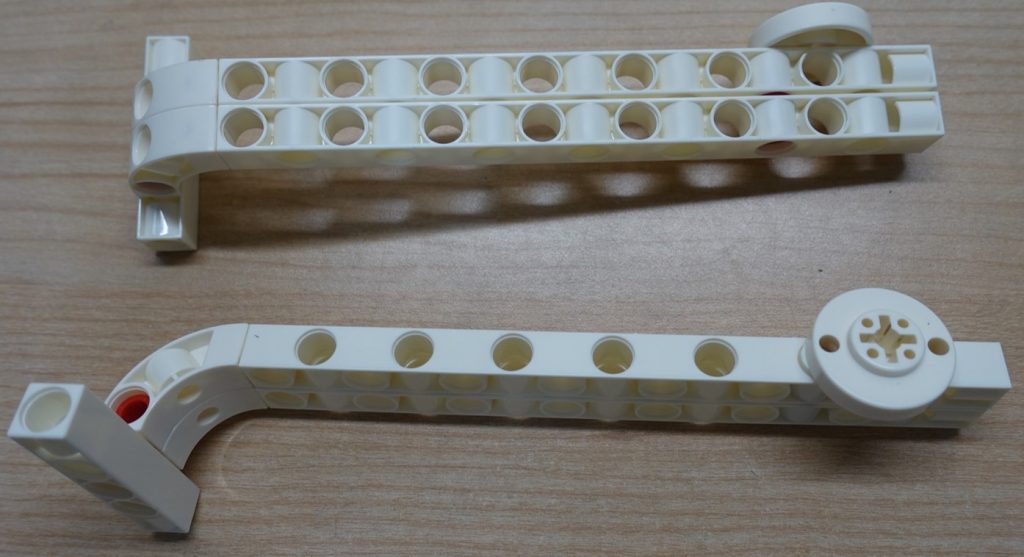
☆下圖為彈力懶人夾。
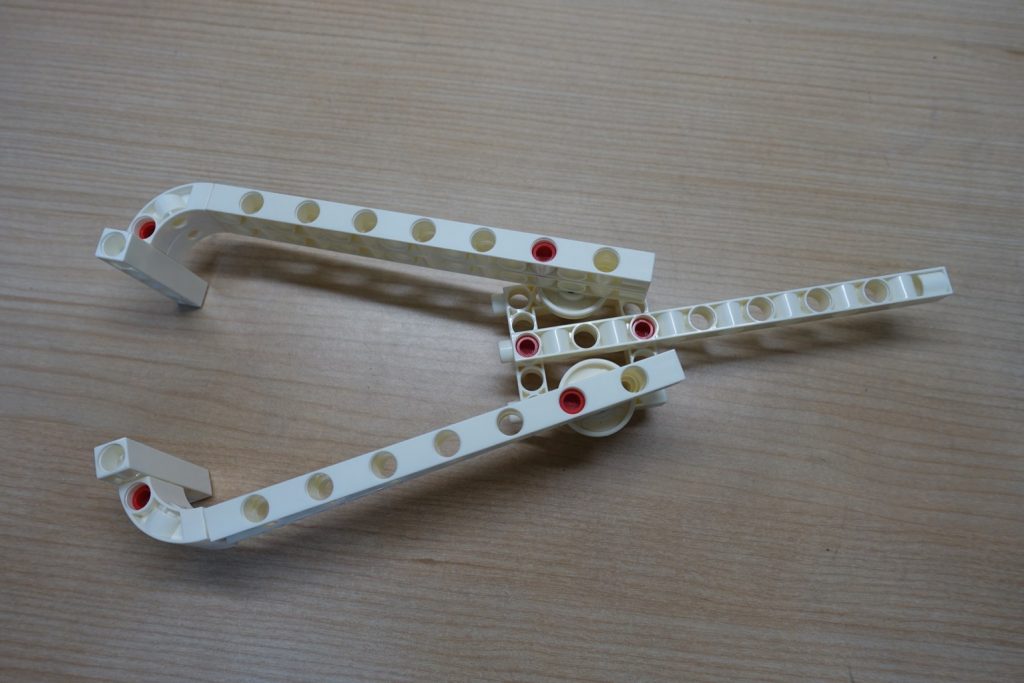
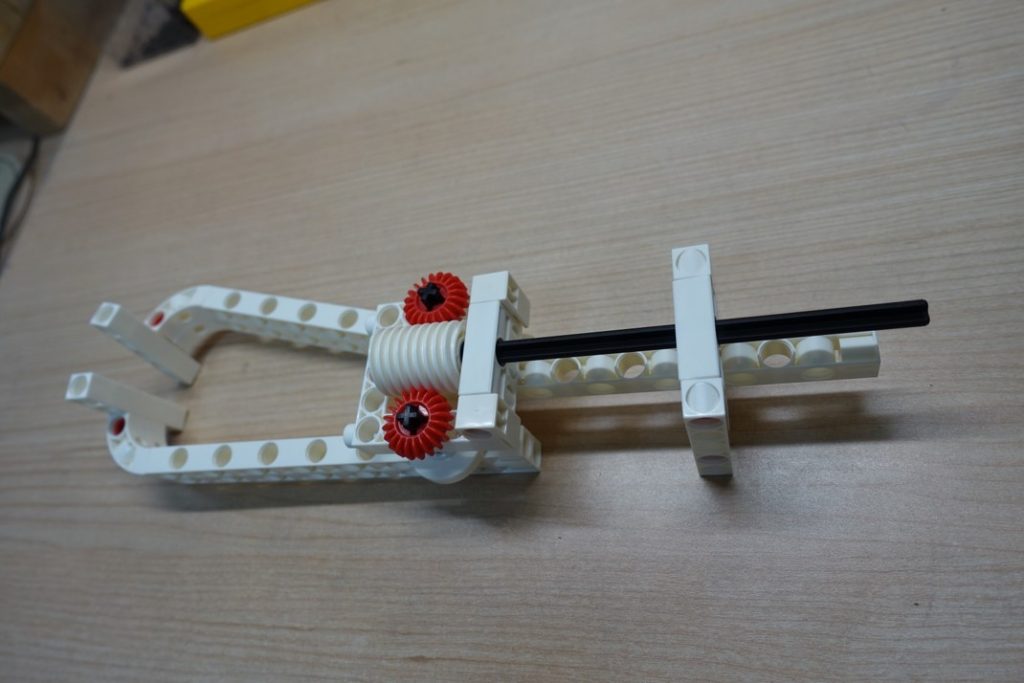
☆下圖為轉動式開合的機械手臂。

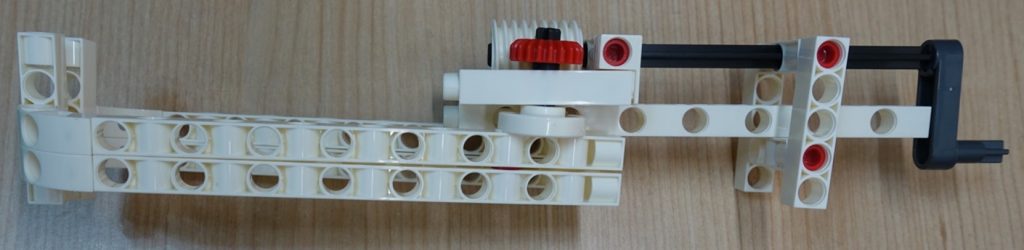
☆下圖為轉動式開合的機械手臂加上馬達控制,可以自動開合。

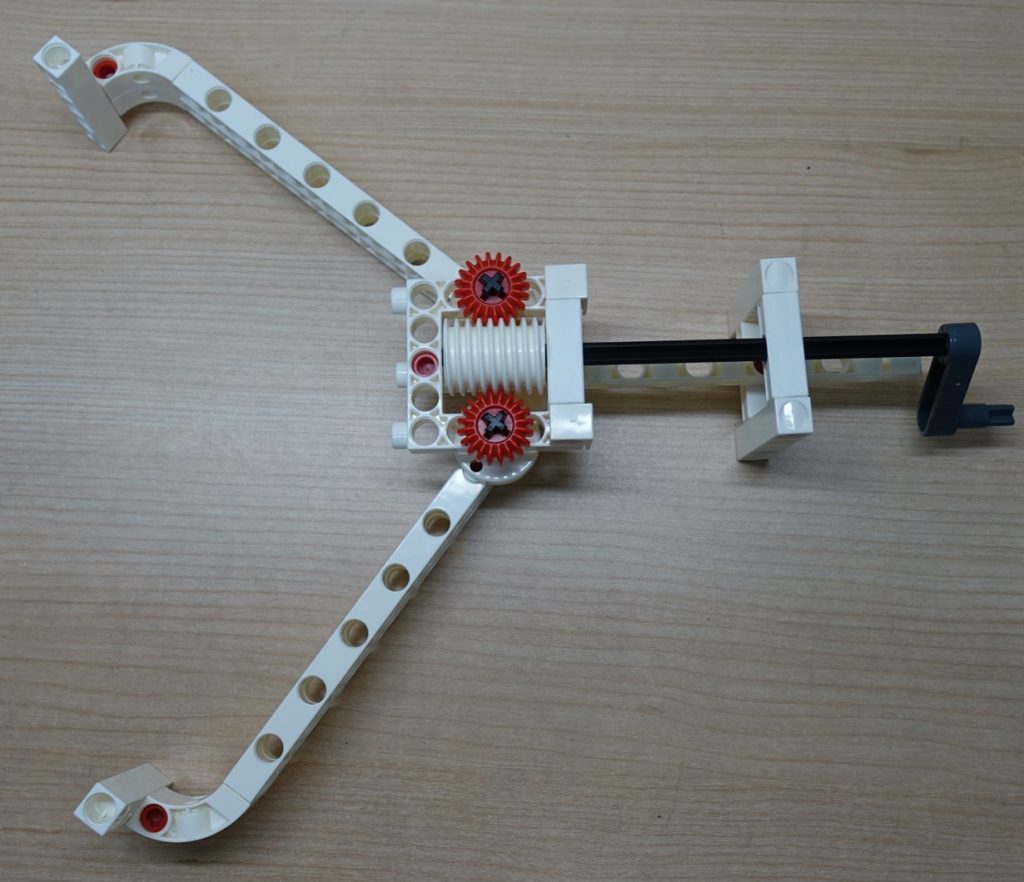
下圖為轉動式開合的機械手臂完成的樣子。
※製作方式:
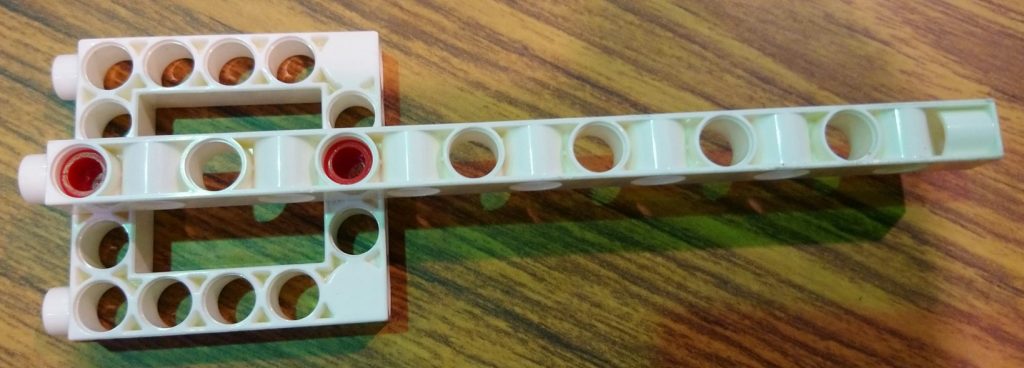
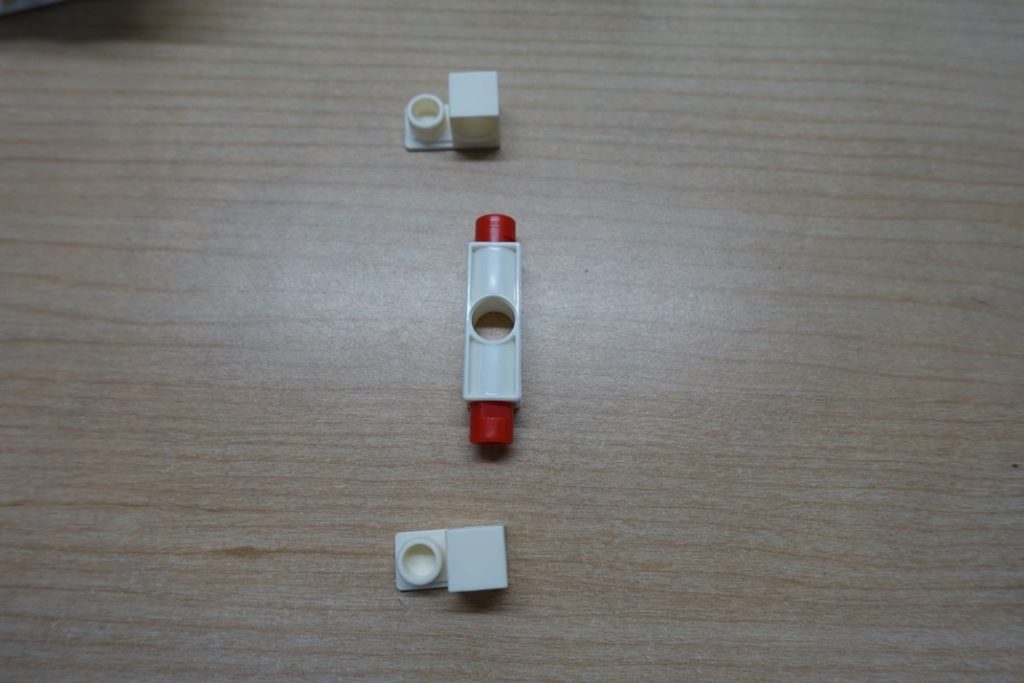
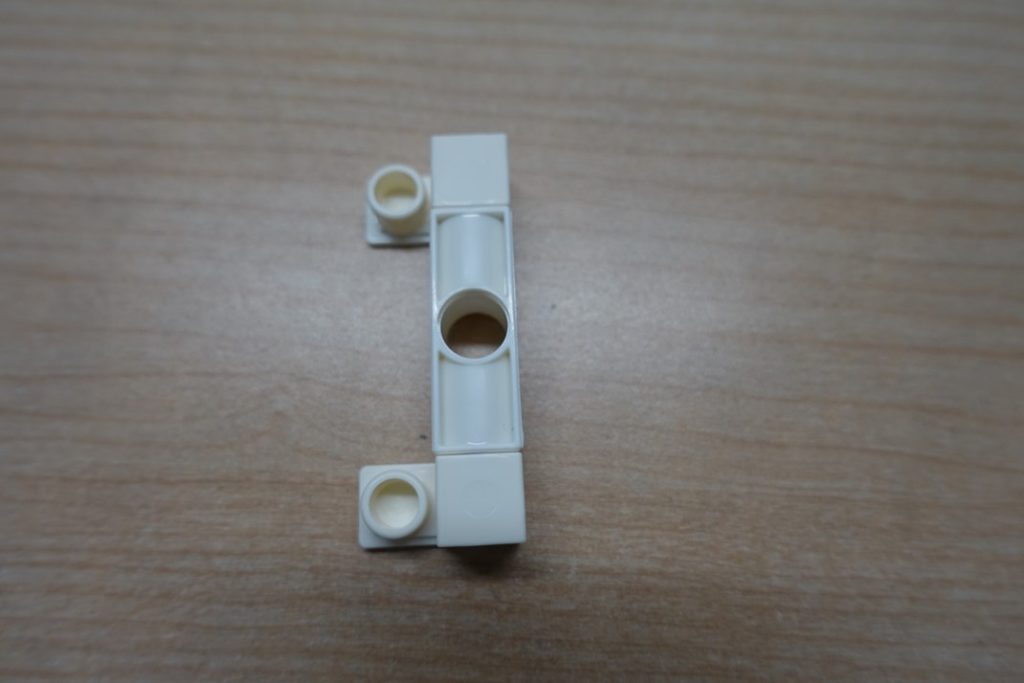
步驟1-先組裝主體。
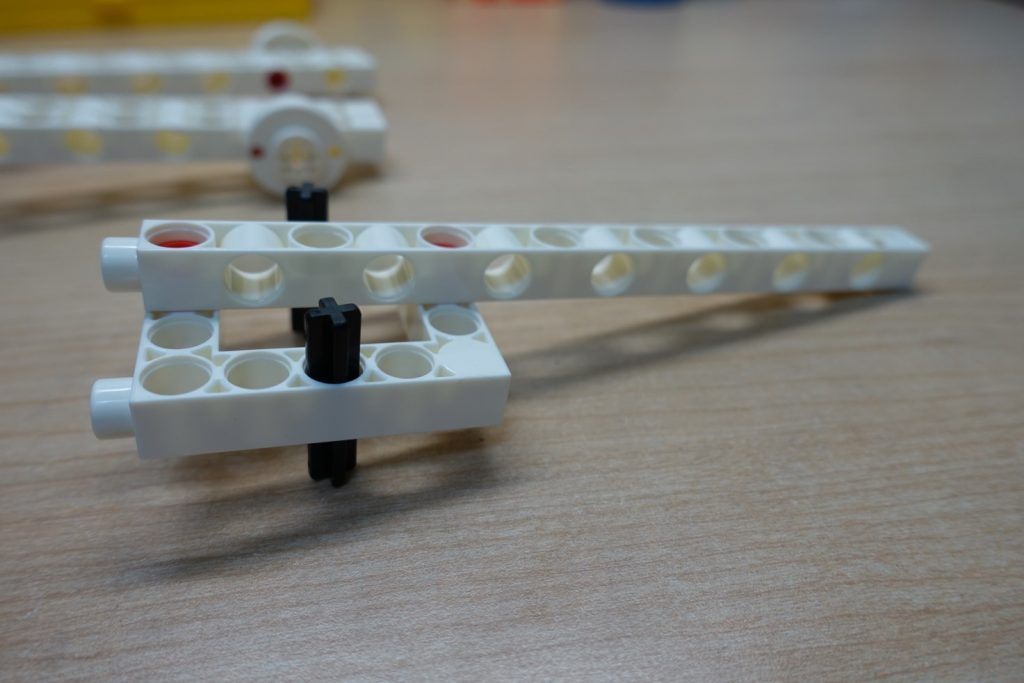
步驟2-將上兩個短軸。
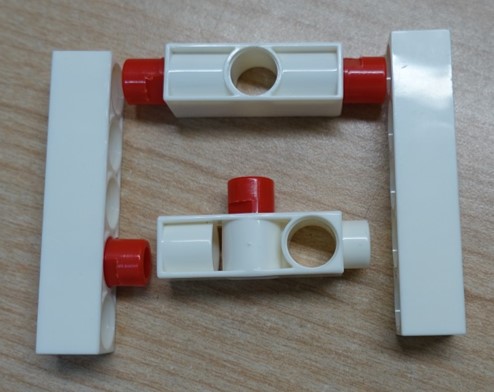
步驟3-用來夾取物品的爪子,將爪子加粗,並裝上控制旋轉方向的軸轉接器。
步驟4-組裝爪子和主體。
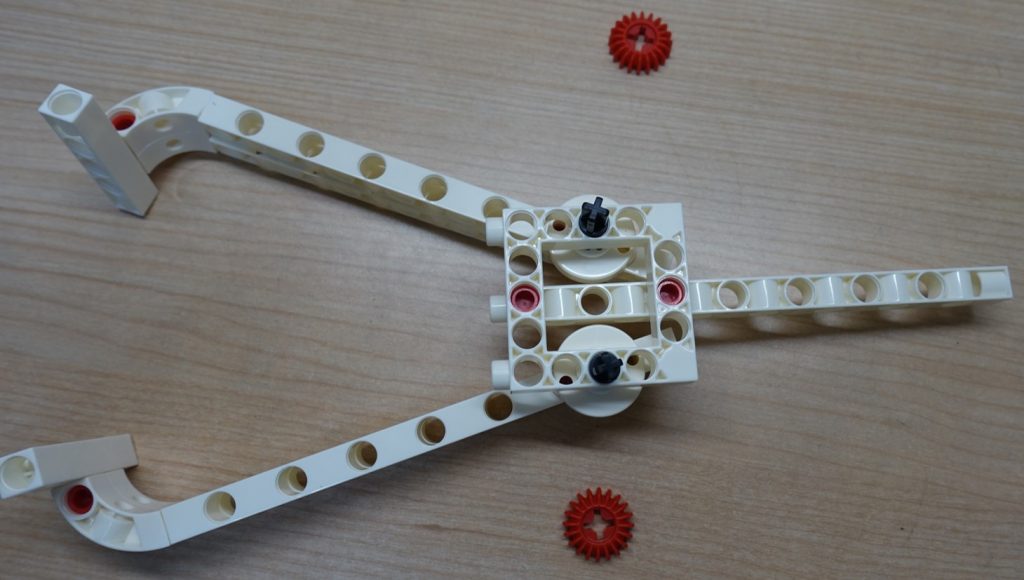
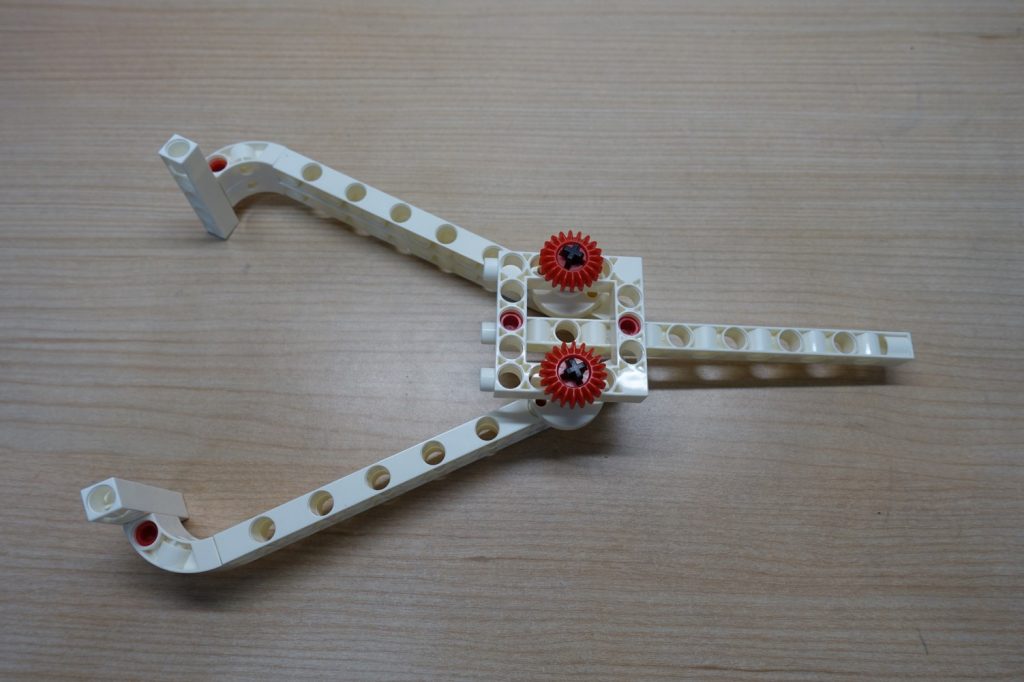
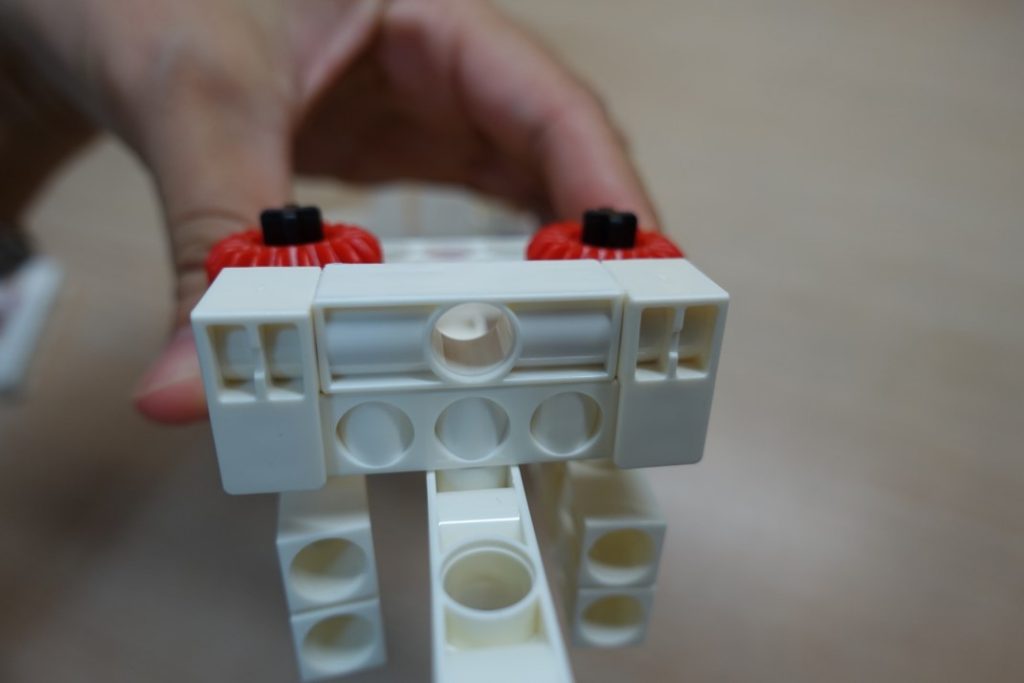
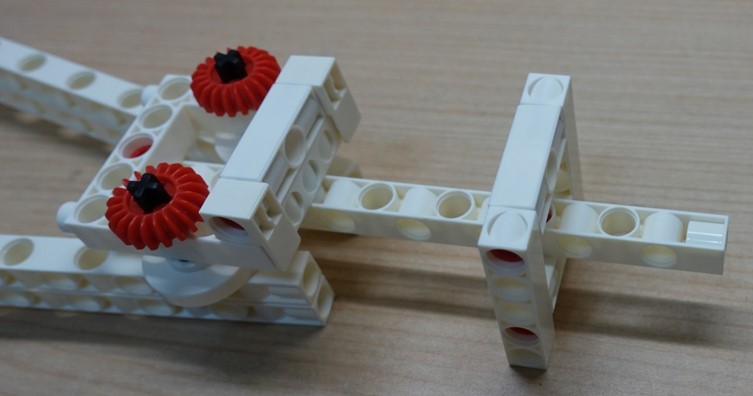
步驟5-在短軸一端分別加上小齒輪。
步驟6-
步驟7-組裝轉動長軸的前支架。
步驟8-前支架組裝。
步驟9-前支架組裝完成。
步驟10-後支架組裝。
步驟11-後支架組裝完成。
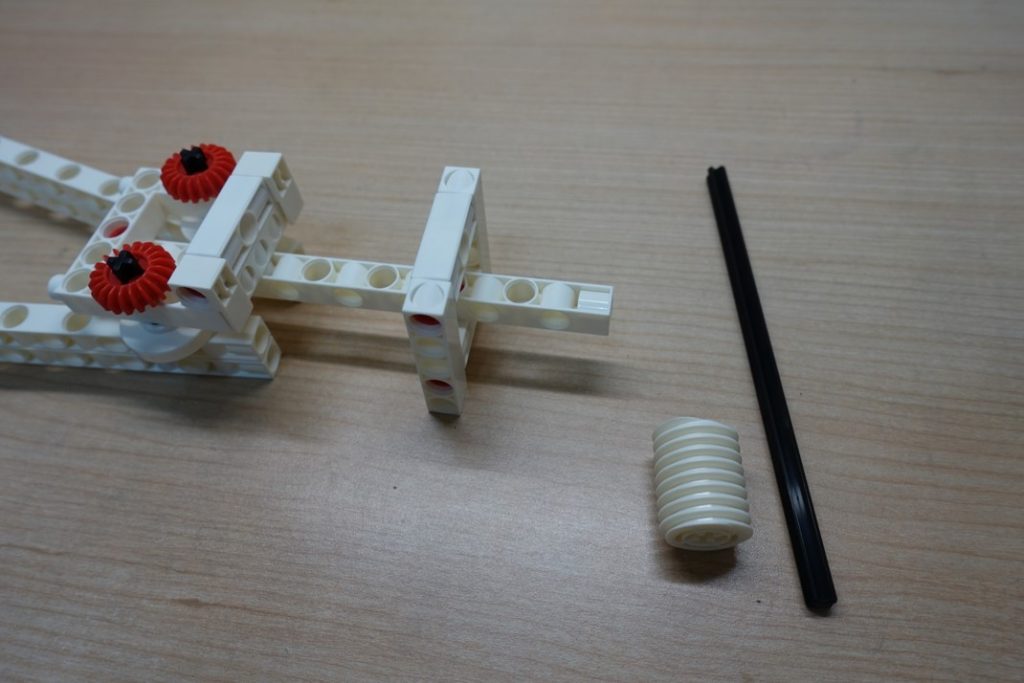
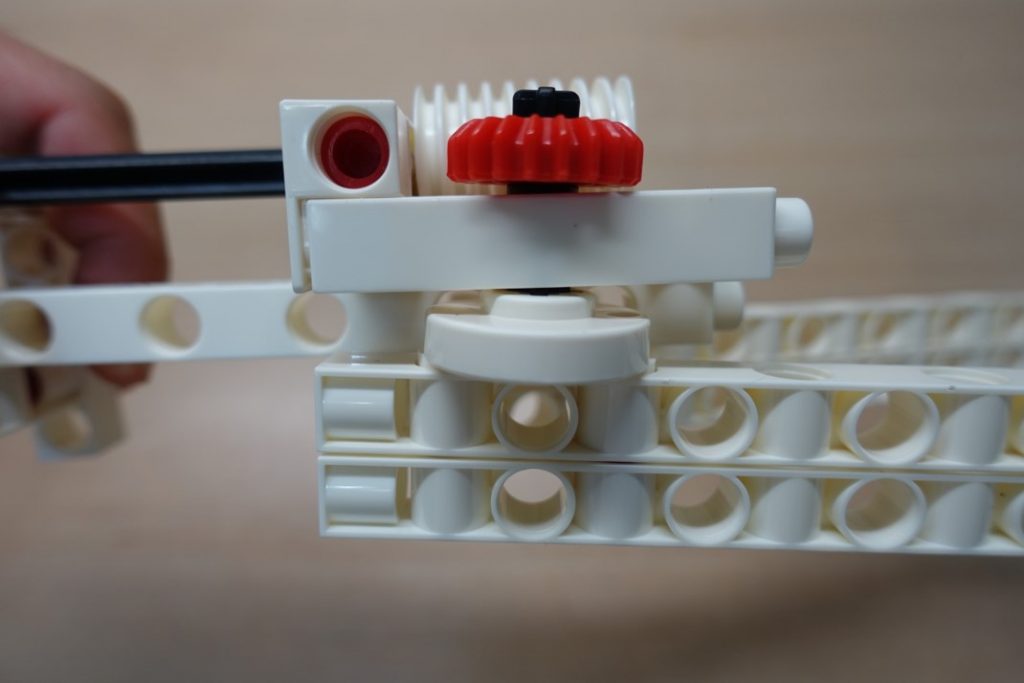
步驟12-準備轉動長軸和渦桿。
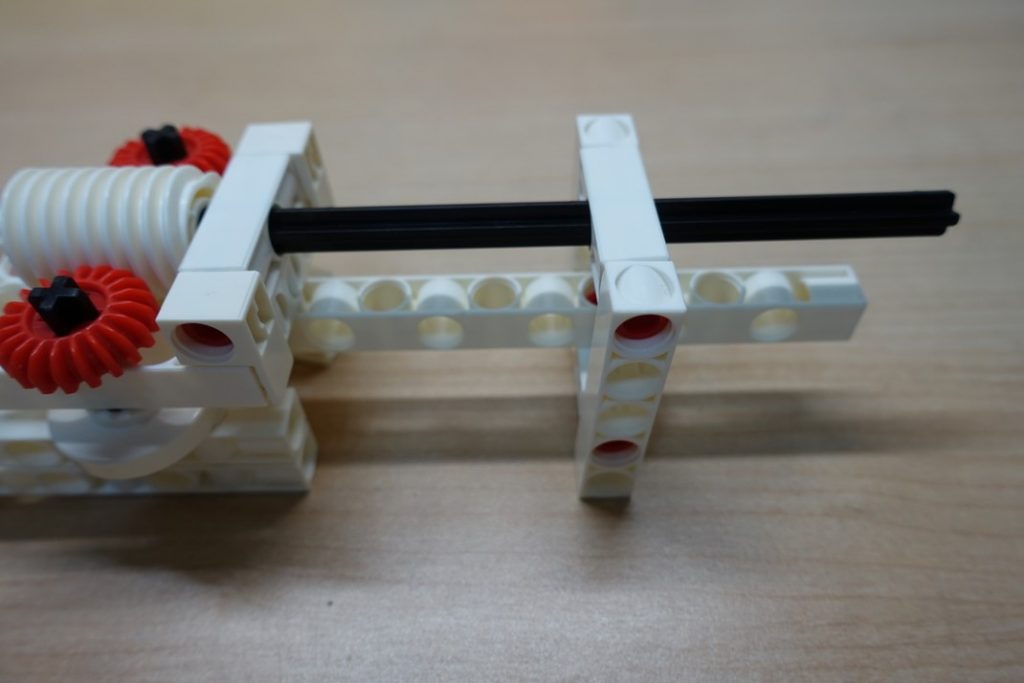
步驟13-先將爪子位置調整平均後,裝上轉動長軸和渦桿。
步驟14-完成圖-閉合。
步驟15-完成圖-張開。
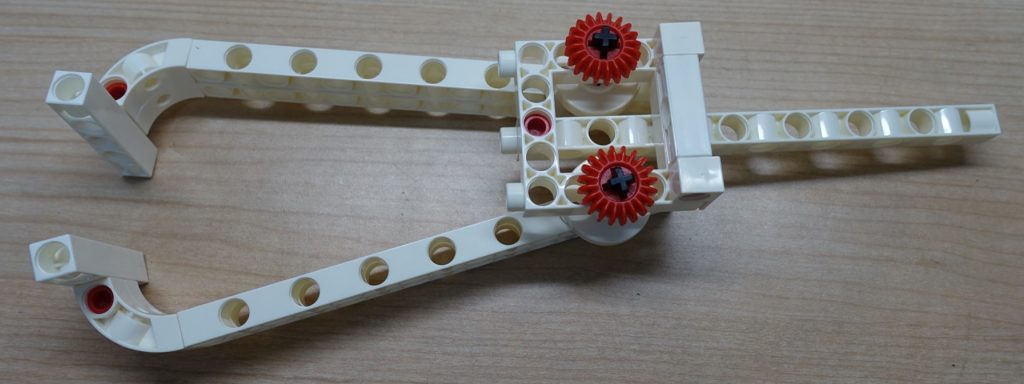
※原理說明:
「升級版轉動開合機械手臂」是透過渦桿將旋轉方向的施力傳動給兩個齒輪,使一分為二,兩個齒輪同時旋轉,此結構中,渦輪轉一圈,齒輪才轉一格,為省力裝置,且可以減慢齒輪轉動速度。接著齒輪帶動爪子同步開合,便完成整個裝置。透過不同功能的積木零件,將力轉換形式、方向,做傳動後,產生了不同的結果,接著可以在施力處,加上馬達,讓手臂自動運轉,正負電交換後,運轉方向就會相反。加馬達部分讓學生自由創作,並無固定步驟。
※接上馬達後運轉的影片
升級版轉動開合機械手臂是由彈力懶人夾改造的,因為希望能讓手臂自動化,但馬達對於彈力控制不容易,較容易做旋轉運動,因此進行了改造,讓手臂的控制以旋轉控制開合。
先來欣賞一下南投縣僑興國小學生上課的成果照片。
下圖為轉動式開合的機械手臂。
下圖為轉動式開合的機械手臂加上馬達控制,可以自動開合。
下圖為轉動式開合的機械手臂完成的樣子。
先介紹製作方式:
步驟1-
步驟2-
步驟3-
步驟4-
步驟5-
步驟6-
步驟7-
步驟8-
步驟9-
步驟10-
步驟11-
步驟12-
步驟13-
步驟14-
步驟15-
步驟16-
步驟17-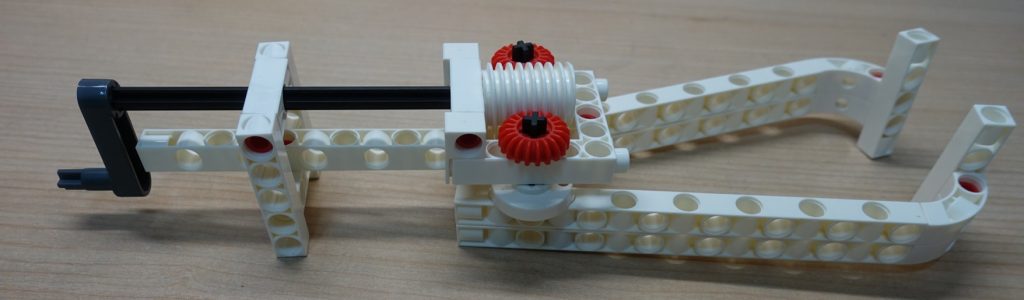
步驟18-
接上馬達後運轉的影片
Please sign in to vote.